
Fターム[2F065JJ26]の内容
光学的手段による測長装置 (194,290) | 受光部 (23,546) | 1つの受光部の素子数 (9,727) | 多数 (6,943) | 2次元状 (5,630)
Fターム[2F065JJ26]に分類される特許
221 - 240 / 5,630
光学特性測定装置および光学特性測定方法
【課題】本発明は、取得したスペクトルから基板上に形成した膜の複数の測定点に対する光学定数を唯一の値として求めることができる光学特性測定装置および光学特性測定方法を提供する。
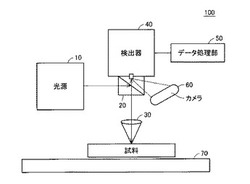
【解決手段】本発明は、光源10と、検出器40と、データ処理部50とを備えている。データ処理部50は、モデル化部と、解析部と、フィッティング部とを備えている。複数の膜モデル式を連立させ、複数の膜モデル式に含まれる光学定数が同一であるとして所定の演算を行ない、算出した膜の膜厚および光学定数を膜モデル式に代入して得られる波形と、検出器40で取得した波長分布特性の波形とのフィッティングを行なうことにより、複数の膜モデル式に含まれる光学定数が同一で、解析部で算出した膜の膜厚および光学定数が正しい値であることを判定する。
(もっと読む)
鏡面反射面の形状測定

【課題】鏡面反射面の形状を測定する方法が提供される。
【解決手段】ターゲット面142に配置されたターゲット140の表面144に表示されたパターンを測定面122に配置された鏡面反射面124から反射させる。反射の画像が撮像面154において記録される。撮像面154に対する鏡面反射面124上の複数の点の位置が決定される。反射の画像上の複数のフィーチャ位置とパターン上の複数のフィーチャ位置との間の第1の関係が決定される。複数の点の位置を初期状態として用いて、鏡面反射面の表面プロファイル及び第1の関係を含む第2の関係から鏡面反射面の形状が決定される。
(もっと読む)
鉄筋規格判別装置及び鉄筋規格情報作成装置
【課題】簡単に精度よく鉄筋の配筋情報を取得する。
【解決手段】携帯端末4は、鉄筋の画像から、背景板Bに対して垂直方向の1ピクセルずつの位置に対応する連続的な径長を抽出する(S1001)。次に、抽出した鉄筋径分布の全データのうち、上部5%のデータと、下部5%のデータとをノイズとして除去する(S1002)。そして、中央部90%のデータにおける最大値を特定し、最大径d1として取得する(S1003)。続いて、鉄筋規格情報452を参照し(S1004)、最大径d1に対応する鉄筋規格を特定できるか否かを判定する(S1005)。鉄筋規格を特定できる場合には(S1005のYES)、該当した鉄筋規格を取得する(S1006)。該当する鉄筋規格を特定できない場合には(S1005のNO)、その旨をオペレータに通知することにより、角度を変えて鉄筋を再度撮影し、画像を抽出し(S1007)、S1001の処理から再試行する。
(もっと読む)
パターン検査装置及びパターン検査方法
【目的】マスクに形成されたパターン自体の位置精度の均質性を検査可能な検査装置を提供する。
【構成】検査装置100は、離散的な領域を撮像した際に取得されたそれぞれの光学画像中の図形の寸法と、対応する参照画像中の図形の寸法との間での第1の位置ずれ量を用いて、被検査領域全体における第1の位置ずれ量マップを作成するマップ作成回路131と、検査領域全体を撮像した際に取得されたそれぞれの光学画像中の図形の寸法と、それぞれ対応する参照画像中の図形の寸法との間での第2の位置ずれ量を用いて、被検査領域全体における第2の位置ずれ量マップを作成するマップ作成回路132と、第2の位置ずれ量マップを、第1の位置ずれ量マップと第2の位置ずれ量マップとの第1の差分マップで補正した第3の位置ずれ量マップに定義される各値のうち、許容値を超える値の有無を判定する判定回路156と、を備えたことを特徴とする。
(もっと読む)
基板検査装置
【課題】検査精度の向上を図ることのできる基板検査装置を提供する。
【解決手段】基板検査装置は、実装エリア内のクリームハンダ4及びレジスト膜5の表面の三次元計測を行うと共に、各クリームハンダ4の最高点の位置情報を基に算出した所定の平面を第1仮想基準面K1として設定し、さらに当該第1仮想基準面K1をベース基板2の表面2aに直交する方向に沿って所定位置まで降下させ、第2仮想基準面K2として設定する。そして、当該第2仮想基準面K2からの各クリームハンダ4の突出量を算出し、これを基に当該クリームハンダ4の印刷状態の良否を判定する。
(もっと読む)
形状計測方法、形状計測装置、プログラム及び記録媒体
【課題】被検物の裏面からの不要反射光の影響を除去して、被検物の被検面の形状を高精度に計測すること。
【解決手段】記憶制御部161は、理想被検面での反射による第1の基準反射光スポットの位置及び光量分布をHDD133に記憶させる。更に、記憶制御部161は、理想裏面での反射による第2の基準反射光スポットの位置及び光量分布をHDD133に記憶させる。取得部162は、被検面からの第1の反射光スポット及び裏面からの第2の反射光スポットを含む画像データをカメラ110から取得する。フィッティング部165は、HDD133に記憶された第1及び第2の基準反射光スポットの光量分布を合成させる。フィッティング部165は、その合成光の光量分布が、実際の合成光の光量分布と一致するように、第1及び第2の基準反射光スポットをフィッティングさせる。計算部166は、フィッティング結果に基づいて被検面の形状を計算する。
(もっと読む)
転写方法および転写装置
【課題】原板が有する凹凸パターンを容易にかつ高い位置精度で基板上の転写液層にインプリントすることのできる技術を提供する。
【解決手段】原板Mの凹凸パターンP面が基板S上に塗布された転写液層に接触した状態で、原板Mおよび基板のそれぞれに形成されたアライメントマークを、1つの認識手段3により、両アライメントマークが重なる方向から、一方のアライメントマークを撮像した後、他方のアライメントマークを撮像し、得られた両アライメントマークの画像にそれぞれ位置誤差補正処理を行う。そのため、補正後の両アライメントマーク画像を用いて高精度なアライメントを行うことが可能になる。
(もっと読む)
校正原器、形状計測装置、横座標校正方法及び光学素子の製造方法
【課題】汎用性の高い校正原器を提供し、一つの校正原器で種々の形状計測装置の横座標の校正を可能にする。
【解決手段】形状計測装置の横座標を校正する際にワークの代わりに配置される校正原器20に、入射角度に係わらず光を元来た方向に反射する再帰性光学素子21を設け、この再帰性光学素子21によって測定光Lmを反射させる。校正原器20は、再帰性光学素子21によって反射するため、種々の曲率半径の測定光を元来た方向に反射することができ、これによって、種々の形状計測装置の横座標の校正に使用することができる。
(もっと読む)
バーコード外観検査システム、バーコード外観検査方法
【課題】バーコードの外観不良を簡易に検査できるバーコード外観検査システム等を提供する。
【解決手段】バーコード外観検査システムの画像処理装置の制御部は、カメラで撮影されたバーコード6の撮影画像データを取得し、バーコード6のバー配列方向の両端部のエッジ65の位置と、バー配列方向の両端部の近傍におけるバー長さ方向の両端部のエッジ67a、67bの位置を算出する。続いて、これらエッジ65、67a、67bの位置に基づきバーコード6の中心座標等を演算して求め、これに基づきバーコード6の欠陥検出領域を生成する。次に、この欠陥検出領域において、バー長さ方向の微分フィルタ演算と演算結果の2値化を行い、バーコード6の汚れ61、抜け63等の欠陥領域を検出する。いずれかの欠陥領域の面積が所定値以上の場合に、画像処理装置の制御部は、バーコード6に外観不良があると判定する。
(もっと読む)
ネイルプリント装置及び印刷制御方法
【課題】複数回印刷ヘッドを走査して爪部に印刷を施す場合に、n回目の走査終了後n+1回目の走査までの間に指が動いてしまった場合でも、走査ごとの画像のずれを防いで高品質の印刷を行うことのできるネイルプリント装置及び印刷制御方法を提供する。
【解決手段】爪部Tを複数の領域に分けて複数回の走査により1つのデザイン画像を印刷する場合に、各回の走査開始前(S3)に爪部Tの位置情報を取得する(S2)とともに、n+1回目の走査を開始する前に、n回目の走査開始前の爪部Tの位置情報とn+1回目の走査開始前の爪部Tの位置情報とを比較して(S8)爪部Tの位置変化を検出して(S9)、n+1回目の走査開始前に爪部Tの位置変化が検出されたときは、爪部Tの位置変化に応じて、n+1回目の走査を行う際の印刷開始位置を補正し(S10)、この補正後の印刷開始位置から、次の印刷を開始するように印刷制御する(S9)。
(もっと読む)
形状計測装置、横座標校正方法及び光学素子の製造方法
【課題】汎用性の高い横座標の校正方法によって横座標を校正する形状計測装置、及びその横座標校正方法を提供する。
【解決手段】複数の開口が形成され、これら複数の開口の配列によって校正パターンを形成するアパーチャー板20をワークWの被検面Wsの前面に配置する。この開口を通過すると共に、被検面Wsで反射され、再度開口を通過した測定光Lmを撮像素子5によって検出する。撮像素子上にて結像した校正パターンの横座標位置と、予め計測されている校正パターンの基準横座標位置とを、演算装置7によって比較することによって、形状計測装置1の横座標を校正する。
(もっと読む)
三次元計測装置、三次元計測方法およびプログラム
【課題】 計測誤差の校正が可能な三次元計測装置を提供する。
【解決手段】
所定のパターンを投影する投影部と、パターンが投影された被写体を撮像する撮像部とを有する三次元計測装置は、撮像部によって撮像された画像において、計測空間内の同一平面上に予め設定された複数のパターン検出領域に投影されたパターンの撮像画素面上の位置情報を検出する検出部と、位置情報を用いて、計測時前に予め検出した投影部の投影画素面上のパターンと計測時における投影部の投影画素面上のパターンとの対応関係を算出する対応関係算出部と、を有する。
(もっと読む)
キャリブレーション装置及び歪み誤差算出方法
【課題】撮影画像内の周辺部において生じる歪み誤差を補正できる、キャリブレーション装置及びキャリブレーション方法を提供すること。
【解決手段】キャリブレーション装置100において、特徴点設定部110が、周期性を持って全体に配列された特徴点群が含まれたキャリブレーションボードがステレオカメラによって撮影されたボード画像内の画像内特徴点群の内から、設定ポイントが密に且つボード画像の中央部領域にのみ配置された第1パターン及び設定ポイントが疎に且つボード画像の全体に配置された第2パターンに基づいて、第1の画像内特徴点群セット及び第2の画像内特徴点群セットを設定する。誤差補正情報生成部130が、第1の画像内特徴点群セットに含まれた各画像内特徴点の座標と、第2の画像内特徴点群セットに含まれた各画像内特徴点の座標と、キャリブレーションパラメータとに基づいて、歪み誤差を算出する。
(もっと読む)
計測装置および情報処理装置
【課題】 三次元位置計測において、投影パターンのパターン形状を適切に設定することを目的とする。
【解決手段】 計測対象に対してパターン光を投影する投影手段と、前記パターン光が投影された前記計測対象を撮影し、前記計測対象の撮影画像を取得する撮影手段と、前記撮影画像と、前記投影手段の位置および姿勢と、前記撮影手段の位置および姿勢とに基づいて、前記計測対象の位置および/または姿勢を計測する計測手段と、前記計測対象の位置および/または姿勢の変動範囲から、前記パターン光の識別分解能を設定する設定手段と、前記識別分解能に応じて、前記パターン光のパターン形状を変更する変更手段と、を有することを特徴とする。
(もっと読む)
ワーク接触点補正システムおよび旋盤
【課題】簡単かつ高精度に、ワークの被接触面に対するワーク接触部材の接触点の位置を補正できるワーク接触点補正システムおよび旋盤を提供することを課題とする。
【解決手段】ワーク接触点補正システム2は、ワークWの被接触面W1の形状に沿って、該被接触面W1に対する接触点が変化するワーク接触部材21と、ワーク接触部材21を撮像する撮像装置24と、撮像装置24が撮像した画像からワーク接触部材21の外形線に関する実測データR1を取得し、実測データR1を基に接触点の位置を補正する演算部220aを有する制御装置22と、を備えることを特徴とする。
(もっと読む)
画像測定装置及び画像測定方法
【課題】操作者の手間が少なく、画像中の図形情報の測定を迅速且つ確実に行う。
【解決手段】CPU41は、撮像ユニット17で撮像された被測定対象物の画像を取り込み、取り込んだ画像に含まれる図形の輪郭線をハフ変換によって検出し、検出した輪郭線上にエッジ検出ツールを設定し、設定されたエッジ検出ツールにより、前記図形に関する図形情報の測定を行う。
(もっと読む)
車両検出装置
【課題】複数の映像間で対応をとる特徴点を定めて位置合わせ基準を鮮明にでき、車両の検出精度を向上させる。
【解決手段】実施形態の車両検出装置は、線分成分抽出手段、多角形近似手段及び計測手段を備えている。前記線分成分抽出手段は、左右の撮影画像毎に、当該撮影画像に含まれる前記車両のフロントガラス領域と車体との境界を示す複数の線分成分を抽出する。前記多角形近似手段は、前記左右の撮影画像毎に、当該抽出された複数の線分成分の幾つかを用いて閉ループを構成する多角形近似を行う。前記計測手段は、前記左右の撮影画像毎に前記閉ループを構成する線分成分を当該左右の撮影画像間で互いに位置合わせし、当該位置合わせした線分成分間の座標情報と、左右の撮影画像を撮影した撮影位置を示す撮影位置情報とに基づいて、前記閉ループの位置を前記車両の位置として計測する。
(もっと読む)
長さ測定装置
【課題】搬送中の長尺材の長さを精度よく測定することができる長さ測定装置を提供する。
【解決手段】長さ検出装置1は、搬送ライン2の搬送方向上流側に設けられた通過検出部3と、搬送方向下流側に設けられた位置検出部4と、長尺材の長さを算出する算出部5と、演算部5等を制御する制御部6を備えている。通過検出部3は、搬送ライン2に向けて投光する複数の通過投光部31と、搬送ライン2を挟んで通過投光部31と対向して設けられた複数の通過受光部32とをセットで具備している。位置検出部4は、搬送方向にほぼ直交する光を搬送ライン2に向けて投光し、該光を該搬送方向に平行走査する投光部41と、該投光部41と搬送ライン2を挟んで対向し、該投光部41からの光を受光する受光部42とを具備している。
(もっと読む)
情報処理装置、情報処理方法
【課題】誤検出指標や検出精度の低い指標による影響を減少させ、高精度かつより安定な撮像装置の位置姿勢計測方法を提供する。
【解決手段】指標検出部2030は、物体上に配置または設定された指標P1、P2、P3を撮像画像から検出する。評価量算出部2060は評価量を、指標P1、P2、P3の画像上での2次元幾何特徴及び/又は指標P1、P2、P3の3次元空間中における撮像装置2010と指標P1、P2、P3との間の関係を表す3次元幾何特徴を利用して算出する。信頼度算出部2070は、算出した指標P1、P2、P3の評価量に応じて指標P1、P2、P3の信頼度を算出する。位置姿勢算出部2080は、算出された指標P1、P2、P3の信頼度と、検出された夫々の指標P1、P2、P3の画像座標に関する情報とを少なくとも用いて、物体または撮像装置2010の位置姿勢を求める。
(もっと読む)
撮像装置及びプログラム
【課題】CMOS型イメージセンサ等を用いて、ローリングシャッター方式で撮像されたボール像が歪んでいても、ボールの運動を正確に解析することができるようにする。
【解決手段】撮像装置100は、ボール像が楕円形に歪んだ状態で含まれるフレームを、内領域A3とその内領域A3と内領域A3の外側の外領域A4とを有する楕円分離度フィルターによってフィルタリング処理することによって、分離度を算出する分離度算出手段7gと、内領域A3の中心位置、長径、短径及び傾斜角を変更しながら分離度算出手段7gによって算出される分離度が最大となる中心位置、長径、短径及び傾斜角をボール像の中心位置、長径、短径及び傾斜角として推定する推定手段7hと、推定手段7hによって推定されたボール像の中心位置の差分とフレーム間のフレーム数とフレームレートとから、ボールの速度を算出する速度算出手段7pと、を備える。
(もっと読む)
221 - 240 / 5,630
[ Back to top ]