
Fターム[2F065JJ26]の内容
光学的手段による測長装置 (194,290) | 受光部 (23,546) | 1つの受光部の素子数 (9,727) | 多数 (6,943) | 2次元状 (5,630)
Fターム[2F065JJ26]に分類される特許
281 - 300 / 5,630
3次元形状の取得装置、処理方法およびプログラム
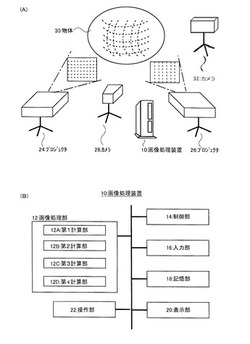
【課題】動きのある対象の形状を高密度かつ高フレームレートに計測可能な画像処理装置、画像処理方法およびプログラムを提供する。
【解決手段】画像処理装置10と、カメラ28、32と、プロジェクタ24と、プロジェクタ26とで、3次元空間中に存在する物体30の2次元画像を撮影し、撮影された2次元画像から物体の3次元形状を復元している。プロジェクタ24は物体30に対して横方向のパターンを照射し、プロジェクタ26は物体30に対して縦方向のパターンを照射している。そして、これらのパターンが物体30で反射したパターン光をカメラ28、32で撮影することで2次元画像を取得し、この2次元画像から画像処理装置10により3次元画像を復元している。さらに、カメラ28と32の整合性を調べることで3次元形状の精度向上が実現される。
(もっと読む)
管内面検査装置およびその検査方法

【課題】管内面の状態や寸法によらずに管内面を検査することができる管内面検査装置およびその検査方法を提供する。
【解決手段】本発明の実施形態は、管2内面の検査箇所にパターンを有するパターン光P1を管2内面の周方向にわたって投影する投影手段11と、検査箇所に投影され反射されたパターン光を反射パターン光P2として投影する表示手段12と、反射パターン光P2の形状を観測する観測手段13とを備える。
(もっと読む)
走査型白色干渉計による試料の表面形状の測定方法
【課題】試料の表面形状の測定精度を大幅に向上させることのできる、走査型白色干渉計による試料の表面形状の測定方法を提供する。
【解決手段】対物レンズの下にビームスプリッター及びミラーを配し、試料表面を含めて、マイケルソン型などの干渉計を構成し、試料までの距離又はミラーまでの距離をピエゾアクチュエーターで走査し、それによりできる干渉波形をCCDカメラで撮影して動画ファイルデータとして記録し、データ収集間隔をナイキスト間隔(干渉波形の周期の1/2)よりも広く取って試料の表面形状を測定する、走査型白色干渉計による試料の表面形状の測定方法において、得られた収集波形についてヒルベルト変換を行い、包絡線と位相を得、こうして得られた位相が0になる走査位置と試料の表面高さとの関係を用いて位相が0になる走査位置から試料表面の高さを算出する。
(もっと読む)
撮像装置、撮像装置の制御方法、三次元計測装置、およびプログラム
【課題】サンプリングピッチを細かくすることなく、少ないサンプリング数でより高精度に交点を算出する。
【解決手段】明部および暗部を有する第1のパターンまたは第2のパターンを投影パターンとして対象物へ投影する投影部と、投影パターンが投影された対象物を撮像素子に輝度分布として結像させる撮像部と、を備え、輝度分布は明部に対応する第1の輝度値と暗部に対応する第2の輝度値とを有し、第1のパターンおよび第2のパターンは明部の位置または暗部の位置が重複する重複部を有し、第1のパターンに対応する第1の輝度分布および第2のパターンに対応する第2の輝度分布は重複部で同輝度値となる交点を有し、交点の輝度値は第1の輝度値および第2の輝度値の平均値と所定値だけ異なる。
(もっと読む)
渦巻きばねの形状を算出するための画像処理装置、方法、及びプログラム
【課題】 渦巻きばねの撮影画像から芯線を正確に抽出する。
【解決手段】 画像処理装置は、渦巻きばねを撮影した撮影画像を入力する画像入力手段と、入力された撮影画像から渦巻きばねの輪郭線を抽出する輪郭線抽出手段と、抽出された輪郭線を極座標変換する座標変換手段と、極座標変換された輪郭線に対して、その輪郭線上を一方向に移動しながら一巡したときの「輪郭線の角座標値列(θ1,θ2,・・,θn)」を取得する角座標値列取得手段と、取得された「輪郭線の角座標値列」を用いて、内フック領域及び外フック領域を特定するフック領域特定手段を有している。
(もっと読む)
欠陥特性評価装置
【課題】反射型サンプル基板上の欠陥の特性を、非破壊かつ高精度に評価可能な欠陥特性評価装置を提供する。
【解決手段】本発明は、反射型サンプル基板であるマスク基板11上の被検欠陥12に対して、実際の露光で利用する波長のコヒーレント光を、マスク基板11上の被検欠陥と略同一のサイズに集光する集光光学系10と、集光光学系10により集光され、マスク基板11上にコヒーレント光を照射する照射部16と、照射部16により照射された照射パタン領域13bからの回折光を2次元的に受光する二次元検出器13と、二次元検出器13による受光結果である画像情報を記録する記録部17と、記録部17により記録された画像情報から、被検欠陥12の反射振幅と位相分布を反復計算により導出する導出部18とを備える。
(もっと読む)
走査型白色干渉計による試料の表面形状の測定方法
【課題】試料の表面形状を測定する際に、干渉波形の包絡線と位相との両方に基き試料の表面形状を算出できるようにした走査型白色干渉計による試料の表面形状の測定方法を提供する。
【解決手段】撮影した動画ファイルデータに基づき、試料の表面上の位置に対応する各画素において、ヒルベルト変換を用いて干渉波形の包絡線と位相を算出し、包絡線がピークになる走査位置と、位相が0になる走査位置を算出し、両位置の差から、試料表面の反射光の位相変化による位置ずれの値を検出し、その値の大きさから、その画素の試料表面が他の画素の試料表面と同種であるか異種であるかを判定し、同種のもの同士で干渉波形の位相が0になる走査位置のずれの平均値を算出しておき、各画素で、位相が0になる位置から対応する試料の表面上の物質での位相が0になる走査位置のずれの平均値を引くことで、反射光の位相変化の影響が消されて試料の表面形状が測定される。
(もっと読む)
走査型白色干渉計のデータ処理方法
【課題】走査型白色干渉計を用いて試料の表面形状を測定する際に、少ないデータ数で精度よく試料の表面形状を測定できるようにするデータ処理方法を提供する。
【解決手段】走査型白色干渉計のデータ処理方法は、干渉計で得た動画ファイルデータを読み出し、それぞれの画素において時間軸方向のデータに基き、ヒルベルト変換を用いて、時間軸上での位置で、干渉計の光路差が0になる走査距離に対応した干渉波形の最大のピークの位置を求め、それを全画素で表わす。
(もっと読む)
記録材判別装置、及び画像形成装置
【課題】 記録材からの透過光を検知することにより記録材の厚さを判別する方法では、記録材の白色度の違いにより記録材の厚みを精度良く判別できない可能性があった。
【解決手段】 カラーセンサにより記録材の白色度又は色度を検知し、記録材の白色度又は色度と透過光量に基づいて、記録材の厚さの判別を行うことにより、記録材の白色度又は色度に関わらず、記録材の判別精度を向上させることができる。
(もっと読む)
位置検出装置、位置検出方法及びコンピュータプログラム
【課題】検出対象の位置を精度良く検出する位置検出装置を提供する。
【解決手段】所定の位置で所定の向きに設置された撮像装置によって撮像された第一の画像から、検出対象に含まれる第一特徴点eye_2l及び第二特徴点eye_2rの平面座標の位置を検出し、第一特徴点及び第二特徴点の空間座標の位置を取得し、第一特徴点と第二特徴点との間の平面座標における距離と空間座標における距離との比を算出し、撮像装置によって撮像された第二の画像から、検出対象に含まれる第一特徴点及び第二特徴点の平面座標の位置を検出し、距離比と、第二の画像における第一特徴点及び第二特徴点の平面座標と、に基づいて第一特徴点及び第二特徴点の空間座標の位置を検出する。
(もっと読む)
関数算出装置、デプスマップ生成装置、関数算出方法及び関数算出プログラム
【課題】ノイズの影響等を軽減させて、ステレオペアの相関関数を精度良く算出することができる関数算出装置、デプスマップ生成装置、関数算出方法及び関数算出プログラムを提供する。
【解決手段】関数算出装置110は、参照視点画像及び複数の近傍視点画像を受信する正規化部111と、参照視点画像及び近傍視点画像をステレオペア毎に平行化する正規化部111と、平行化したステレオペアの視差を正規化する正規化部111と、視差を正規化したステレオペアの参照視点画像及び近傍視点画像に、マッチングウィンドウを定めるウィンドウ設定部112と、マッチングウィンドウ間の1次元POC関数を、視差を正規化したステレオペア毎に算出する関数算出部113と、1次元POC関数のうち、相関ピークの高さが閾値以上である1次元POC関数を統合する関数統合部114と、を備える。
(もっと読む)
測定装置
【課題】内径の異なる種々の穴形状を精度良く測定できる測定装置を提供すること。
【解決手段】被測定領域の少なくとも一部の面の法線方向とは異なる方向から前記被測定領域に照明光を照射することで被測定領域に帯状の照明領域を形成する照明系と、前記照明系による照射方向と前記帯状の照明領域における長手方向等を含む面からはずれた位置から照明領域の散乱光を受光する受光系と、受光系の受光結果に基づいて被検面の形状を算出する演算部と、を備える。
(もっと読む)
鉄筋領域抽出装置、鉄筋領域抽出方法及び鉄筋領域抽出プログラム
【課題】簡単に精度よく鉄筋の配筋情報を取得する。
【解決手段】配筋情報取得システム1において、携帯端末4は、背景バーBの部分に相当する画像全体から、マーカMK1及びMK2を検出する(S901)。次に、マーカMK1と、MK2との間にある画像を切り出す(S902)。その画像において、鉄筋の軸方向に垂直な方向で、ピクセルの輝度が不連続な箇所を検出することにより、領域の境界線となるエッジを抽出する(S903)。続いて、抽出されたエッジのうち、不要なエッジを除去する(S904)。次に、画像の輝度分布に対して度数分布を作成し、その度数分布に基づいて鉄筋、影、背景の3つの領域における代表輝度値を計算し、各代表輝度値を用いて、各エッジに挟まれた領域をいずれかに特定する(S905)。さらに、特定した領域のうち、エッジを挟んで隣り合う領域が同じである場合、その2つの領域を1つの領域として統合する(S906)。
(もっと読む)
三次元形状計測装置及び三次元形状計測方法
【課題】カメラ、レーザの相対位置を高精度で設置する必要がなく、また、測定レンジを複数種類を単一の測定プログラムにより変更する。
【解決手段】レーザ線条光照射部12と、既知形状の基準模様群を表示面に表示した座標変換テーブル作成用印刷表示板16と、照射部位の光切断面及びレーザ照射平面上に設置される表示板16を撮影するカメラ11と、表示板16の基準模様群を撮影したカメラ上の座標データを抽出する基準座標抽出手段131とから基準模様群の座標データと基準座標抽出手段131で抽出されたカメラ上の座標データとの対応関係を示す座標変換テーブル133を作成する。形状測定時には、表示板16を外して同じ位置に被測定物を配置させ、レーザ線条光を照射して照射部位の光切断面を撮影した画像から、点群抽出手段134により光切断面の点群を抽出する。抽出した点群座標を近似処理手段135により座標変換テーブル上の値に近似する。
(もっと読む)
溶接位置の検査方法及びその装置
【課題】
簡単な構成を用いて検査範囲の照度を均一化して検査領域を広範囲とし、溶接部の円形輪郭の全周を抽出し高精度に溶接部の位置を検出することで、所望の位置に溶接が施されているかを検査すること。
【解決手段】
本発明は、上記課題を解決するために、検査対象表面の2次元検査領域に対して傾斜した角度で異なる少なくとも2方向から前記2次元検査領域を照明すると共に、該2次元検査領域に対向した位置から前記異なる少なくとも2方向から照明された複数の画像を取得し、該複数の取得した画像から溶接部のくぼみ傾斜部分に対応する輪郭情報をそれぞれ抽出し、該抽出した複数の輪郭情報を合成することで円形の輪郭を得、該円形の輪郭に円を当てはめて前記溶接部として認識し、該溶接部として認識した円の中心座標を溶接位置とすることを特徴とする。
(もっと読む)
3次元相対座標計測装置およびその方法
【課題】撮影点におけるカメラの位置および姿勢を事前に把握することなく相対座標を計測することができる3次元相対座標計測装置を提供する。
【解決手段】3次元相対座標計測装置90は、第1の視点より3点の基準点が撮像装置で撮像された第1の取得画像を取得する画像取得部100と、各画素に対する画素視点投影角の情報を保持し、情報を用いて、第1の取得画像に投影される3点の基準点に対応する画素視点投影角である3つの第1の基準視点投影角を取得する視点投影角抽出部120と、3つの第1の基準視点投影角と3点の基準点の相対座標とを用いて、第1の取得画像の撮像面である第1の撮像面と3点の基準点を含む基準平面とのなす第1の傾斜角を算出する傾斜角算出部130aと、第1の傾斜角を用いて、3点の基準点のいずれかと対象点との相対座標を計測する相対座標計測部130dとを備える。
(もっと読む)
タイヤ状態検出方法及び装置
【課題】タイヤのスリップ角とキャンバー角を同時に効率よく測定でき、かつタイヤの交換を容易に行うことができるタイヤ状態検出方法及び装置を提供する。
【解決手段】撮像カメラ16で撮像した角度検出用回転体14の画像データを基にタイヤ1204のキャンバー角αを求め、さらに、撮像カメラ16で撮像した走行路面28の画像データと角度検出用回転体14の画像データを基にタイヤ1204のスリップ角βを求める構成にした。
(もっと読む)
検査装置、検査方法及び半導体装置の製造方法
【課題】検査対象からの反射光角度の変化に基づいて基板の欠陥を精度よく検査することができる検査装置を提供すること。
【解決手段】本発明に係る検査装置は、赤外光を出射する光源11と、光源11から出射される赤外光を平行光としてウエハ30に略垂直に入射させ、当該ウエハ30からの反射光を導く光学系と、光学系により導かれる反射光のうち、正反射光以外の光を検出するIRカメラ19、20とを備え、光源11からの赤外光を導光する光ファイバ13の出射端面面は、光学系の瞳位置に配置されている。
(もっと読む)
農産物の体積測定装置
【課題】農産物の体積を高速且つ高精度に測定できるようにする。
【解決手段】塊状の測定対象農産物7の表面上に設定方向に延びる線状の輝線6を形成する光線を照射する光線投射手段2と、輝線6を撮像する撮像手段1と、輝線6を、測定対象農産物7上で、輝線6の方向と交差する方向に移動させる輝線移動手段BMとが備えられて農産物の体積測定装置が構成され、移動される輝線6の移動途中の各位置において、輝線6の位置情報によって得られる測定対象農産物7の外形形状と、測定対象農産物7上の輝線の両端位置の夫々から前記光線の入射側と反対側へ伸ばした線を測定対象農産物7の外形形状とみなしたみなし外形形状とに基づいて特定される面積の少なくとも一部に対して補正係数を乗算することによって補正し、前記移動途中の各位置での補正後の面積に基づいて測定対象農産物7の体積を求める。
(もっと読む)
測定装置
【課題】入遮光位置の測定精度を高める。
【解決手段】検出光を出射する投光素子62と、前記投光素子62と対向配置されたイメージセンサ85と、前記イメージセンサ85から受光信号を読み出す信号読出回路90と、前記受光信号のレベルと所定の基準レベルとを比較し、被検出物が前記検出領域を通過した際に、前記受光信号のレベルが基準レベル以上から前記基準レベル以下に、あるいは前記基準レベル以下から前記基準レベル以上に変化する入遮光位置を測定して出力する測定回路120とを備え、前記信号読出回路90と前記測定回路120の間に、前記信号読出回路90で読み出される受光信号波形から所定周波数の信号成分を除去する第一フィルタ回路100を備える。
(もっと読む)
281 - 300 / 5,630
[ Back to top ]