
Fターム[2F065JJ26]の内容
光学的手段による測長装置 (194,290) | 受光部 (23,546) | 1つの受光部の素子数 (9,727) | 多数 (6,943) | 2次元状 (5,630)
Fターム[2F065JJ26]に分類される特許
201 - 220 / 5,630
動き検出装置
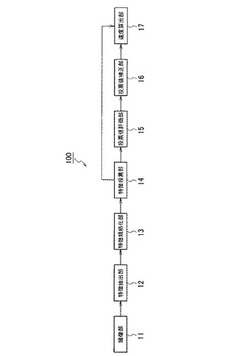
【課題】移動する測定対象物が加速、減速した場合であっても該測定対象物の速度を高精度に測定することが可能な動き検出装置を提供する。
【解決手段】撮像部11で撮像される画像の各画素に、測定対象物の測定対象物が存在した場合に、投票値を付与する。そして、積算された投票値が増加する場合には、測定対象物は減速しているものと判断し、他方、積算された投票値が減少する場合には、測定対象物は加速しているものと判断する。そして減速している場合には、特徴領域に対応する画素の投票値に、所定の補正値を加算することにより、実際の速度を反映した投票値に補正する。また、減速している場合には、特徴領域に対応する画素の投票値から所定の補正値を減算することにより、実際の速度を反映した投票値に補正する。
(もっと読む)
回転駆動機構

【課題】複雑な加工を必要とすることなく、有線の装置を360度またはこれを少し超える程度の角度で回転させることができるようにした、回転駆動機構を提供する。
【解決手段】有線装置を搭載して、基板20に対し正逆方向に回転可能に設けられた回転テーブル21と、回転テーブル21に設けられた第1ドグ28と、基板20に設けられて第1ドグ28に押圧されることで変位する第2ドグ29と、第2ドグ29の変位によって押圧されることで回転テーブル21の回転を停止させる一対の規制部とを備えた回転駆動機構である。一対の規制部は回転テーブル21が初期位置から360度以上の設定角度正回転した際に、第2ドグ29に押圧されるように基板20上に配置された第1規制部35aと、回転テーブル21が初期位置から360度以上の設定角度逆回転した際に、第2ドグ29に押圧されるように基板20上に配置された第2規制部35bとを有している。
(もっと読む)
ワーク位置検出システム
【課題】透明体であるワークの安定的な位置を検出することができるワーク位置検出システムを提供する。
【解決手段】透明体であるワークの端面が発光するように光を照射する少なくとも一つの投光部(21a〜21c)と、光によってワークの端面に生じた発光箇所を撮像する撮像部(22a、22b)と、撮像部による撮像結果に基づいてワークの位置を検出する検出部と、を有する。
(もっと読む)
寸法測定装置、シール面間寸法測定装置およびシール面間寸法測定方法
【課題】自動車のドア側のシール面とボディー側のシール面との間のシール面間寸法を正確かつ短時間で測定する。
【解決手段】少なくとも片面に配置された複数のターゲットマーク13を表にして車両のボディー側に取り付けるボディー側ターゲットボード11と、両面に配置された複数のターゲットマークが表裏から見えるように車両のドア側に取り付けるドア側ターゲットボード12と、車両のボディー側のシール面およびドア側のシール面にレーザ光を照射するレーザ光照射部22と、ターゲットボード11、12を撮影するステレオカメラ23と、撮影したレーザ光からボディー側およびドア側のシール面の断面形状を認識し、撮影したターゲットマーク13を用いてボディー側およびドア側のシール面の断面形状を一致させるように移動させ、ボディー側のシール面とドア側のシール面との間のシール面間寸法を測定する画像処理部30と、を有する。
(もっと読む)
指示位置表示装置および指示位置表示システム
【課題】レーザー光の照射位置の制御や照射位置の制御にかかる装置レイアウトの自由度を向上する。
【解決手段】カメラ10と、レーザーポインタ20が照射するレーザー光の照射位置を含む範囲をカメラ40が撮像するようにレーザーポインタ20とカメラ40とを載置され、レーザーポインタ20とカメラ40とを一緒に回動させるポインタマニピュレータ30と、ポインタマニピュレータの回動を制御する制御装置50と、を備え、制御装置50は、カメラ40が撮像する画像P2とカメラ10が撮像する画像P1とを取得し、画像P2内における画像P1の位置を特徴点マッチングにより特定し、画像P1と画像P2と前記位置とに基づいて、ポインタマニピュレータ30の回動を制御する。
(もっと読む)
対象物体の検出方法、検出装置及びプログラム
【課題】対象物体を3次元の点群として計測した場合の形状データに基づいて、高速化を図りつつ精度よく対象物体を検出することの可能な検出方法を提供する。
【解決手段】3次元計測手段から3次元の計測点群として球体の形状データを取得する形状データ取得ステップ(S1)と、仮想座標空間において球体が占める対象体領域を各計測点の付加情報に従って区画する領域分割ステップ(S41)と、分割された各対象体領域の中から球体と推定される推定領域を抽出する対象体領域抽出ステップ(S43)と、推定領域毎に推定球体を生成し、対象体と認識される推定対象体を認識対象体とする対象体認識ステップ(S44)とを備える。
(もっと読む)
車両用ミラー制御装置
【課題】車両用ミラーの鏡面角度をドライバにとって好適な角度に自動的に調整しながらも、乗員にとっての快適性を損ない難くすることを可能にする。
【解決手段】車両が走行中と判定した場合であって、且つ、いずれかの車両用ミラーをドライバが見ていると判断した場合には、ドライバが見ている車両用ミラーであると判断した車両用ミラーの最適角度を算出し、その算出結果に基づいて当該車両用ミラーについてのみ鏡面角度の調整を行う一方、車両が走行中でないと判定した場合、若しくは車両が走行中と判定した場合であって、且つ、いずれの車両用ミラーもドライバが見ていると判断しなかった場合には、車両用ミラーの鏡面角度の調整を行わない。
(もっと読む)
立体感提示装置および方法ならびにぼけ画像生成処理装置,方法およびプログラム
【課題】片眼でも立体感を得ることができる立体感提示装置を提供する。
【解決手段】間隔をおいて配置された2台のカメラから出力されるステレオ画像データを構成する左右の画像データに基づいて距離画像データを生成する距離画像生成手段53と,生成された距離画像データを用いて,上記の左または右の画像データに,距離に応じた焦点ぼけを与えてぼけ画像データを生成するぼけ画像生成手段55を備える。生成されたぼけ画像データに基づいて対象の焦点ぼけ画像を表示装置に表示する。
(もっと読む)
振動計測装置および振動計測方法
【課題】振動の測定および解析を容易に行うことができるようにする。
【解決手段】高速度カメラ4の撮像部4aは、ケーブル10の各実測点に設けられたマーカーシール5が正反射する光を撮像する。高速度カメラ4の計算処理部4bは、撮像部4aによる撮像と並行して、撮像部4aが撮像した画像毎に各実測点の座標を求める。高速度カメラ4のメモリ4cは、各実測点の座標に係るデータを記憶する。コンピュータ6は、メモリ4cに記憶された各実測点の座標に係るデータを用いてケーブル10の振動分析を行う。
(もっと読む)
光検出装置
【課題】入射光の入射位置及び入射方向を同時に検出することができるようにした光検出装置を提供する。
【解決手段】第一の平面内にマトリックス状に配置した複数個の光検出素子から成る第一の光センサアレイ11と、第一の平面の光入射側と反対側にて所定間隔dで平行に隔置した第二の平面内にマトリックス状に配置した複数個の光検出素子から成る第二のセンサアレイ12と、スポット状の入射光による第一及び第二の光センサアレイ11、12からの検出信号に基づいて、当該入射光の第一及び第二の光センサアレイ11、12上における入射位置P1,P2を演算すると共に、演算した入射位置間の偏位量ΔPから当該入射光の入射角度θを演算して、当該入射光の入射位置及び入射方向を決定する信号処理部14と、を含むように、光検出装置10を構成する。
(もっと読む)
転写方法および転写装置
【課題】原板が有する凹凸パターンを容易にかつ高い位置精度で基板上の転写液層にインプリントすることのできる技術を提供する。
【解決手段】原板Mの凹凸パターンP面が基板S上に塗布された転写液層UVRに接触した状態で、原板Mおよび基板Sのそれぞれに形成されたアライメントマークALを、1つの認識手段により、両アライメントマークALが重なる方向から同時に撮像して得られた1つの画像から両アライメントマークALの位置を別々に認識処理することで原板Mと基板Sとのアライメントを行う。そのため、撮像された原板Mおよび基板Sのアライメントマーク画像に相対的な位置誤差が生じるおそれがなく、振動や異なる走査タイミングに起因する位置誤差が生じることを防止できる。
(もっと読む)
画像処理方法、ステレオカメラシステム
【課題】より短い処理時間で距離情報が得られる画像処理方法を提供すること。
【解決手段】第1の画像と第2の画像を撮影するステップと、加算手段241が、第1の画像の第1の合計値、及び、第2の画像の第2の合計値を算出する合計値算出ステップと、シフト手段242が記第1の合計値を所定ビット数、右にシフトして第1の近似平均値を算出し、同様に第2の近似平均値を算出する近似平均値算出ステップと、整数倍手段243,244が、第1の画像と第2の画像の小領域内の各画素データの値を整数倍する整数倍ステップと、相関値算出手段249が、該画素データの値を整数倍した値から第1の近似平均値を引いた第1のデータと、画素データを整数倍した値から第2の近似平均値を引いた第2のデータをそれぞれ求め、画素データ毎に前記第1のデータと第2のデータとの差分の二乗和を算出する相関値算出ステップと、を有する画像処理方法を提供する。
(もっと読む)
撮像装置
【課題】 被写体をステレオ撮影時にズーム調整が可能であり、撮影したステレオ画像から被写体の3次元位置情報を高精度で取得できる撮像装置を実現する。
【解決手段】 被写体を第1の方向から撮像する第1の撮像手段と、被写体を第1の方向とは異なる第2の方向から撮像する第2の撮像手段とを備え、第1の撮像手段により撮像された第1の画像と、第2の撮像手段により撮像された第2の画像を用いて、被写体の3次元位置情報を取得する撮像装置であって、撮像装置は、第1の画像および第2の画像をズーム調整して結像させるズーム光学系を有し、ズーム光学系は、焦点距離を検出する焦点距離検出手段を有することを特徴とする。
(もっと読む)
塗布状態測定方法
【課題】測定対象物に塗布された塗布物質の塗布状態をより簡単に精度よく測定する。
【解決手段】測定対象物を撮像して測定対象物のスペクトル画像を取得する画像取得ステップS01と、画像取得ステップにより得られたスペクトル画像に基づいて、塗布物質の種類を判別する塗布物判別ステップS02と、画像取得ステップにより得られた前記スペクトル画像に基づいて、塗布物質の塗布量を測定する塗布量測定ステップS03と、を備える。
(もっと読む)
圧着端子検査装置および圧着端子検査方法
【課題】検査作業者の技量にかかわらず、圧着端子を精度よく検査できる、圧着端子検査装置および圧着端子検査方法を提供する。
【解決手段】圧着端子3の検査時には、検査作業者により、圧着端子検査装置1の端子配置部に圧着端子3が配置されて、圧着端子3が延伸方向に延びる軸線を中心に揺動される。この揺動中に、ハイト測定用エリアイメージセンサ14の撮像面141への圧着端子3の投影における第1測定位置Piおよび第2測定位置PwでのY軸方向寸法Yi,Ywが測定される。そして、Y軸方向寸法Ywの極小値Ywminが圧着端子3のワイヤバレル部32のクリンプハイトHwとして取得される。
(もっと読む)
表面形状測定方法および装置
【課題】 表面形状測定において、測定対象面と参照面からの反射光により干渉縞を発生させ、各画素の位相を単色光ごとに求め、表面形状を測定において、波長の異なる複数の単色光を得る場合は、抽出手段を増設する必要が生じていた。
【解決手段】 照射手段を介して測定対象面と参照面に波長の異なる複数の単色光を照射し、測定対象面と参照面の両方から反射して同一光路を戻る反射光によって生じる干渉縞の強度値に基づいて、測定対象面の表面高さと表面形状を求める表面形状測定方法において、前記照射手段が、広帯域な波長特性を有する照射光から、音響光学フィルタを用いて任意の異なる波長の単色光を複数抽出し、同時に混在して照射する照射手段を用いる。
(もっと読む)
車両運転支援装置、道路の路肩を検出する方法および該方法に基づく車両運転支援方法
【課題】本発明は、実際の道路環境において、反射光(楕円偏光)の楕円軸が車両の車軸方向あるいは高さ方向に対して傾いている場合であっても、正確に路肩を検出することができる新規な車両運転支援装置を提供することを目的とする。
【解決手段】偏光撮像手段の画素毎に直交する2つの偏光方向をもつ偏光素子を設け、該偏光素子の偏光検出軸を所定の角度範囲で変更させながら、2つの偏光方向に対応する光強度の比を監視し、当該光強度比が最初の極値に達したときの光強度に基づいて偏光状態特徴量を算出する。この偏光状態特徴量が所定の閾値を超える領域を路肩として検出し、その位置情報に基づいて、操舵制御手段、走行速度制御手段、警告手段等を制御することによって車両の運転支援を行う。
(もっと読む)
投影制御装置及び投影制御方法
【課題】投影装置の動作をフレームごとに制御することを可能にする。
【解決手段】投影装置を制御するための投影制御装置は、複数の色成分で構成された映像信号を受信し、受信した映像信号の各フレームについて特定の色成分の情報を制御情報として抽出し、抽出された制御情報に基づいて投影装置の動作を制御するための投影制御情報をフレームごとに生成し、生成した投影制御情報を投影装置に供給する。
(もっと読む)
形状計測装置及び形状計測方法
【課題】物体の形状計測を非接触且つ高精度で行い得る形状計測装置及び形状計測方法を提供する。
【解決手段】 本発明の形状計測装置1は、少なくとも5つの光源を等間隔に直線状に配列した光源アレイ11、1次元格子の格子面を有する格子プレート12、1次元格子が投影される計測対象物体21を撮影するカメラ13及び制御ユニット50を備える。制御ユニット50は、少なくとも5つの光源のうち隣接配置の少なくとも4つの光源からなる光源組を2組設定し、この2組の光源組における各光源を順次点灯するよう光源アレイ11を制御するとともに、それぞれ計測対象物体21に投影される1次元格子を撮影するようカメラ13を制御し、撮影された画像から2組の光源組による計測対象物体21上に投影された1次元格子の位相をそれぞれ算出し、当該2つの位相の差を位相シフト量として予め定めた換算式に基づいて計測対象物体21に関する高さ座標を求める。
(もっと読む)
円形状測定方法および装置
【課題】高価な専用装置を用いることなく、平面上の円形パターンをマルチステップ法により高精度に測定できる円形状測定方法および装置を提供する。
【解決手段】円形パターンを有する被測定物Wを載置するテーブル10、テーブルの回転機構20、画像プローブ30、画像プローブを移動させる移動機構40、制御装置50を有する円形状測定装置を準備する。画像プローブを円形パターンの円周に沿って移動させながら、円形パターンの円周を360°/mピッチで測定する工程と、円形パターンの中心を基準に360°/mだけテーブルを回転させて円形パターンの円周上の同一点を測定する測定動作を、360°/mずつテーブルを回転させながら合計m回行ってm個の測定データを取得する工程と、このm個の測定データから円形パターンの形状成分を求める工程を備える。
(もっと読む)
201 - 220 / 5,630
[ Back to top ]