
Fターム[2F065LL12]の内容
光学的手段による測長装置 (194,290) | 光学系 (17,149) | 完全反射体 (2,799) | 平面鏡(プリズム含む) (1,867)
Fターム[2F065LL12]の下位に属するFターム
回転又は振動 (344)
Fターム[2F065LL12]に分類される特許
161 - 180 / 1,523
レーザ干渉測長装置の絶対位置測定方法、及びレーザ干渉測長装置
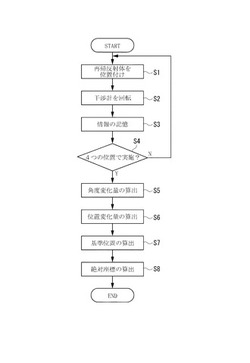
【課題】レーザ干渉測長装置に対する再帰反射体の絶対位置を精度良く測定できる絶対位置測定方法を提供する。
【解決手段】絶対位置測定方法は、予め設定された3つ以上の各位置に再帰反射体をそれぞれ位置付ける工程S1,S4と、回転機構を動作させ、前記各位置にそれぞれ位置付けられた再帰反射体に対して測定光を出射可能とする各姿勢に干渉計を設定する工程S2と、回転機構の動作量に基づいて前記各姿勢間での測定光の光軸の角度変化量を算出する工程S5と、干渉計から出力される信号に基づいて前記各姿勢間での前記光軸に沿う方向の再帰反射体の位置変化量を算出する工程S6と、前記各位置、角度変化量、及び位置変化量に基づいて、レーザ干渉測長装置の基準位置を算出する工程S7と、基準位置に対する再帰反射体の絶対座標を算出する工程S8とを備える。
(もっと読む)
ステレオカメラ校正器

【課題】この発明は、複数回撮像しなくてもステレオカメラを校正することができ、手前の支柱により奥のマーカが隠れることがなく、個々のマーカを容易に区別することができるステレオカメラ校正器を実現することを目的とする。
【解決手段】この発明は、ステレオカメラの校正に使用されるステレオカメラ校正器において、向かい合わせた2枚の鏡の間に2つ以上の実マーカを配置し、1つの実マーカに対して2枚の鏡に複数の鏡像が映ることを特徴とする。
(もっと読む)
内部欠陥検査方法及びその装置
【課題】
試料表面に非接触で超音波励起を行い、超音波を励起した点を光干渉計測する手段を用いた非接触で試料内部の観察を行うことにより、稼動部分が無く、コンパクトな構成で、高感度で非破壊・非接触に内部欠陥を検査する。
【解決手段】
検査対象の試料から離れた場所から超音波を発射してこの超音波を試料に照射し、この試料の表面の超音波が照射された箇所に偏光の状態が制御された偏光光を照射し、この偏光光が照射された試料の表面からの反射・散乱光のうち照射した偏光光と同じ偏光特性を持つ光を光検出器で検出し、この光検出器で検出した信号を処理して試料の内部の欠陥を検出する内部欠陥検査方法及びその装置とした。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】対象物体が傾いている場合や対象物体のサイズが部分によって相違している場合でも、対象物体の位置を精度よく検出することのできる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10は、検出用光源12から検出光L2を出射し、検出対象空間10Rの対象物体Obで反射した検出光L2の一部を光検出器30で受光して対象物体Obの位置を検出する。また、入射光選択部20は、検出対象空間10R(空間10R1、10R2、10R3)のうち、一部の空間についてはこの一部の空間から光検出器30への反射光L3の入射が許容された選択状態とし、他の空間については他の空間から光検出器30への反射光の入射が阻止された非選択状態とする。また、入射光選択部20は、選択状態とされる空間および非選択状態とされる空間をZ軸方向で切り換える、
(もっと読む)
形状計測装置および形状計測方法
【課題】1つのカメラの視野に入らない計測対象物の裏側の形状まで精度良く計測する装置および方法を提供する。
【解決手段】計測対象物に格子模様を投影する格子模様投影部と、計測対象物の周囲に配置された少なくとも1つの鏡と、計測対象物および鏡に映る計測対象物の鏡像の画像を撮影する少なくとも1つの撮影部と、計測対象物の画像と鏡像の画像の各々に対して位相解析処理を施して計測対象物の形状を算出するとともに撮影された前記計測対象物の画像と前記鏡像の画像とを合成する解析処理部とを備え、撮影部の各々は、計測対象物の少なくとも一部の領域と該少なくとも一部の領域の鏡像とを同時に撮影可能に配置されていることを特徴とする。
(もっと読む)
絶対位置測定装置及び絶対位置測定方法
【課題】移動体の絶対位置を高い精度で求めること。
【解決手段】絶対位置測定装置は、移動体2に形成された2つの減圧空間部3,23に個々に収容されて、中心波長が単一の光源を用いて移動体に光を照射して干渉信号を得る2つの干渉計6,25と、2つの減圧空間部の少なくとも一方を減圧して、2つの減圧空間部を互いに異なる圧力にする真空ポンプ4及び真空排気流路5,24と、2つの干渉計より得られる干渉信号の位相を検出する2つの位相検出器17,35と、2つの位相検出器で検出される位相を比較する位相比較器19と、位相比較器19における位相比較結果に応じて原点を設定する原点信号発生器21と、原点信号発生器21で設定される原点を基準として移動体の絶対位置を求める絶対位置算出器22,37とを備えている。
(もっと読む)
形状測定装置
【課題】光切断法を用いた形状測定装置の投光手段または撮影手段に付着した異物を容易に検出する技術を提供する。
【解決手段】被測定物Wにスリット光を投光する投光手段1,2と、撮像面を有し、スリット光が投光された被測定物Wを撮影する撮影手段3,4と、撮影手段3,4により撮影された画像の中のスリット光の像である光切断線に基づいて被測定物Wの形状を算出する形状算出部と、を備えた形状測定装置Aは、スリット光が直線として投光される面を有する被測定物Wにそのスリット光が投光された状態で撮影された画像の中の光切断線の連続性を判定することにより投光手段1,2または撮影手段3,4に付着した異物の有無を判定する。
(もっと読む)
表面形状の評価方法および評価装置
【課題】第1表面に対向する第2表面による反射像の影響を受けずに被評価物体の表面形状を精度よく評価することができるようにする。
【解決手段】評価装置は、評価対象である板ガラスなどの被評価物体3の表面3aに映し出されたストライプパターン1を、CCDカメラ2によって撮像するように構成されている。ストライプパターン1は、光源の発光面に設けられている。また、光源が発射する光の波長は、200〜380nmである。CCDカメラ2によって撮像された画像は、演算装置としてのコンピュータ4に取り込まれ、コンピュータ4によって画像解析が行われる。
(もっと読む)
光学系の光学面の間隔を測定する方法及び装置
【課題】本発明の目的は、単レンズ又は多レンズ光学系の光学面の間隔が確実かつ高精度に測定され得る装置及び方法を指定することである。
【解決手段】多レンズ光学系(38)の光学面(S1、S2、S3)の間隔を測定する方法の場合に、光学系のセンタリング状態は、光学系(38)の少なくとも2つの光学面(S1、S2、S3)を考慮することにより記録される。光学系(38)は、センタリング状態を考慮して、光学系(38)の光軸(40)が参照軸(34)とできる限り揃うように調節される。次のステップでは、光学面(S1、S2、S3)の間隔が、短コヒーレンス干渉計(24)を用いて決定される。この目的のために光学系(38)に向けられる測定光線(50)は、参照軸(34)に沿っている。試験片(38)の事前の調節により、光学系の少なくとも2つの光学面を考慮して、高精度の測定が得られる。
(もっと読む)
シート材端部の観察評価装置及び方法
【課題】 高価な位置検出器を取り付けることなく、シート材端部の観察画像が常に最適状態にある観察装置及び方法、並びに、観察画像を用いた評価結果にばらつきが生じることを防ぐことができる観察評価装置及び方法を提供する。
【解決手段】 連続搬送されるシート材端部を第1及び第2の観察手段を用いて観察評価する装置及び方法において、
第1の観察手段は、シート材の幅方向端部を視野に含み、厚み方向にシート材端部との距離が変更可能な第1の観察手段位置変更機構に取り付けられ、
第2の観察手段は、シート材の厚み方向端部を視野に含み、幅方向にシート材端部との距離が変更可能な第2の観察手段位置変更機構に取り付けられており、
第1及び第2の観察手段での観察情報に基づき、シート材の幅及び厚み方向端部の位置を検出し、第1及び第2の観察手段位置変更機構を制御することを特徴とするシート材端部の観察評価装置及び方法である。
(もっと読む)
パターン形成装置、マーク検出装置、露光装置、パターン形成方法、露光方法及びデバイス製造方法
【課題】移動体の位置を高精度に制御しつつ、物体上の複数のマークの検出時間を短縮する。
【解決手段】 露光装置は、ウエハWを保持してXY平面内で移動するとともに、上面にY軸方向を周期方向とする格子を有する一対のYスケール39Y1、39Y2が設けられたウエハステージWSTと、X軸方向に関して検出領域の位置が異なる複数のアライメント系AL1、AL21〜AL24と、X軸方向に関して前記複数の検出領域の両外側に1つずつ配置される一対のYヘッド64y1、64y2を含む複数のYヘッド64を有し、一対のYスケールの少なくとも一方と対向するYヘッドによって、ウエハステージWSTのY軸方向の位置情報を計測するYエンコーダと、を備えている。このため、ウエハステージWSTのY軸方向の移動の際に、ウエハ上の複数のマークを複数のアライメント系で同時に計測可能になる。
(もっと読む)
多レンズ光学系の光学面の曲率中心の位置の測定
【課題】本発明は、多レンズ光学系(62)の光学面(S1、S2、S3)の曲率中心(K1、K2、K3)の位置を測定する方法に関する。
【解決手段】最初に、光学面(S1、S2、S3)の間隔が、干渉計(24)を用いて参照軸(34)に沿って測定される。次に、光学面(S1、S2、S3)の曲率中心(K1、K2、K3)が、光角測定デバイス(22)を用いて測定される。光学系(62)内のある光学面(S2、S3)の曲率中心の位置の測定の間に、この光学面(S2、S3)及び光角測定デバイス(22)の間にある光学面(S1、S2)の曲率中心(K1、K2)の測定された位置と、光学面(S1、S2、S3)の以前測定された間隔とが、計算的に考慮される。このように、測定の特に高い精度が達成される。なぜなら、望まれる間隔が当てにされる必要がないからである。
(もっと読む)
検出装置
【課題】合焦精度の低下を軽減する。
【解決手段】ラインピクセルにより受光される光量データが飽和したとき、ラインピクセルの略中央のピクセルである合焦ピクセルを過ぎたときの前後2ピークのピークピクセルを決定し(S11)、決定したピークピクセルにおけるZ軸カウンタ値を取得し(S12)、取得したZ軸カウンタ値を直線補間して、合焦ピクセルにおけるZ軸カウンタ値を推定し(S13)、推定された合焦ピクセルにおけるZ軸カウンタ値に基づいて、対象物2の面位置を検出する(S14)ので、受光される光量が飽和したときでも、合焦精度の低下を軽減することができる。本発明は、例えば、対象物の断面形状を測定する測定装置に用いられる位置検出装置に適用することができる。
(もっと読む)
突き合わせ溶接部の溶接品質評価装置
【課題】溶接線の径が多様に変化する筒形状部材であっても、計測機器の種類を増やすことなく、また、計測作業時間の増大を極力抑制する。
【解決手段】カメラ装置4が第1の撮影位置での溶接裏波8の全周にわたる撮影を終了すると、その装置本体41は移動ステージ42により第2の撮影位置に移動され、同様に、溶接裏波8の全周にわたる撮影を行う。このときの第1の撮影位置から第2の撮影位置までの距離Lは、第1の撮影位置におけるカメラ装置4と、撮影対象地点である溶接裏波8との間の距離Hに応じて設定される。そして、これら2個所の撮影位置で撮影された画像情報により、三角測量の原理に基づき溶接裏波8の3次元形状情報が演算され、この3次元形状情報に基づき突き合わせ溶接部の溶接品質が評価される。
(もっと読む)
部品実装装置及び部品実装方法
【課題】部品装着前の位置合わせに必要な装置誤差のデータを正確に取得して部品を高精度で基板に装着することができる部品実装装置及び部品実装方法を提供することを目的とする。
【解決手段】装着ヘッド15のツール(部品用ツール20又は治具用ツール20J)の加熱を行うヘッド側加熱ヒータH1のほか、治具部品JGが載置される治具部品載置部AR2の加熱を行う載置部側加熱ヒータH2を備え、治具部品載置部AR2の温度がヘッド側加熱ヒータH1によって加熱された治具用ツール20Jの温度とほぼ同じ温度になるように載置部側加熱ヒータH2の制御を行う。
(もっと読む)
表面形状測定方法
【課題】表面形状測定機の測定視野以上の測定領域の測定をするに際して、複数の測定結果の繋ぎ合せを簡易に行うことを可能とし、オーバーラップ領域を低減して全体の測定時間を削減し、さらに一定の累積誤差の発生を低減することが可能な表面形状測定方法を提供すること。
【解決手段】面測定データの繋ぎ合せ時に回転方向の補正を行わず、面測定データの平行移動のみを行い面測定データを合成して合成面測定データを取得するようにする。
(もっと読む)
膜厚測定方法および装置
【課題】フィルムの表面と裏面から反射した光の分光スペクトルによるパワースペクトルのピークからこのフィルムの膜厚を測定する膜厚測定装置は、フィルムの膜厚が厚いと測定ができなくなり、また複屈折性を有するフィルムはピークが双峰性を有するので、誤差が大きくなる。本発明は、膜厚が厚くかつ複屈折性を有するフィルムでも正確な測定ができる膜厚測定方法および装置を提供することを目的にする。
【解決手段】フィルムに偏光した光を照射し、フィルムを透過した光からリタデーションを演算し、このリタデーションとフィルムの屈折率差から膜厚を演算する。膜厚が厚く、かつ複屈折性を有するフィルムの膜厚を正確に測定できる。
(もっと読む)
位置検出装置、位置検出方法、マイケルソン干渉計、およびフーリエ変換分光分析装置
【課題】簡素な構成からなる位置検出装置を得る。
【解決手段】所定の移動方向(矢印AR)に移動する板ばね部41(被測定物)の位置を検出する位置検出装置70は、受光部72Aと、受光部72Aに対向し受光部72Aに向けて測定光80を投光する投光部71Aとを備える。受光部72Aおよび投光部71Aは、受光部72Aおよび投光部71Aの間で移動する板ばね部41の移動方向(矢印AR)に対して、測定光80が斜めに交差するように配置される。板ばね部41の移動に伴って、測定光80の一部は板ばね部41に遮られるとともに、測定光80の残部は受光部72Aに到達する。受光部72Aが受光する測定光80の残部の受光量に基づいて、板ばね部41の位置が検出される。
(もっと読む)
プロキシミティ露光装置、プロキシミティ露光装置の基板位置決め方法、及び表示用パネル基板の製造方法
【課題】安価な構成で、チャックのθ方向の傾きを精度良く検出して、基板のθ方向の位置決めを精度良く行う。
【解決手段】X方向(又はY方向)へ移動する第1のステージ(14)、第1のステージに搭載されY方向(又はX方向)へ移動する第2のステージ(16)、及び第2のステージに搭載されθ方向へ回転する第3のステージ(17)を有する移動ステージにチャック(10a,10b)を搭載する。チャック(10a,10b)に複数の光学式変位計(41)を設け、複数の光学式変位計(41)により、第2のステージ(16)に取り付けた第2の反射手段(35)までの距離を複数箇所で測定する。複数の光学式変位計(41)の測定結果から、チャック(10a,10b)のθ方向の傾きを検出し、検出結果に基づき、第3のステージ(17)によりチャック(10a,10b)をθ方向へ回転して、基板(1)のθ方向の位置決めを行う。
(もっと読む)
干渉計測方法および干渉計測装置
【課題】 干渉計測の応答速度を損なう事無く高精度な屈折率補正を実現可能な干渉計測方法を提供する。
【解決手段】 参照面で反射された光束と被検面で反射された光束との干渉信号を検出することによって被検光路の幾何学的距離を計測する干渉計測方法において、互いに波長が異なる複数の光束を用いて被検光路の光路長を算出する多波長光路長算出工程、多波長光路長算出工程で算出された被検光路の光路長から被検光路の空気の屈折率を算出する屈折率算出工程、屈折率算出工程で算出された屈折率を平滑化することによって平滑化屈折率を算出する平滑化屈折率算出工程、平滑化屈折率算出工程で算出された平滑化屈折率から被検光路の幾何学的距離を算出する幾何学的距離算出工程を有する事を特徴とする。
(もっと読む)
161 - 180 / 1,523
[ Back to top ]