
Fターム[2F065MM22]の内容
光学的手段による測長装置 (194,290) | 走査形態 (5,021) | 受光系による走査 (768) | 自己走査型 (48)
Fターム[2F065MM22]に分類される特許
1 - 20 / 48
ネイルプリント装置及び印刷制御方法
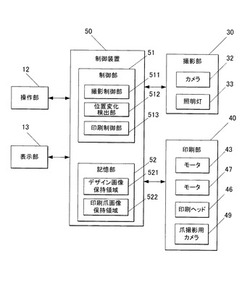
【課題】複数回印刷ヘッドを走査して爪部に印刷を施す場合に、n回目の走査終了後n+1回目の走査までの間に指が動いてしまった場合でも、走査ごとの画像のずれを防いで高品質の印刷を行うことのできるネイルプリント装置及び印刷制御方法を提供する。
【解決手段】爪部Tを複数の領域に分けて複数回の走査により1つのデザイン画像を印刷する場合に、各回の走査開始前(S3)に爪部Tの位置情報を取得する(S2)とともに、n+1回目の走査を開始する前に、n回目の走査開始前の爪部Tの位置情報とn+1回目の走査開始前の爪部Tの位置情報とを比較して(S8)爪部Tの位置変化を検出して(S9)、n+1回目の走査開始前に爪部Tの位置変化が検出されたときは、爪部Tの位置変化に応じて、n+1回目の走査を行う際の印刷開始位置を補正し(S10)、この補正後の印刷開始位置から、次の印刷を開始するように印刷制御する(S9)。
(もっと読む)
鉄筋領域抽出装置、鉄筋領域抽出方法及び鉄筋領域抽出プログラム

【課題】簡単に精度よく鉄筋の配筋情報を取得する。
【解決手段】配筋情報取得システム1において、携帯端末4は、背景バーBの部分に相当する画像全体から、マーカMK1及びMK2を検出する(S901)。次に、マーカMK1と、MK2との間にある画像を切り出す(S902)。その画像において、鉄筋の軸方向に垂直な方向で、ピクセルの輝度が不連続な箇所を検出することにより、領域の境界線となるエッジを抽出する(S903)。続いて、抽出されたエッジのうち、不要なエッジを除去する(S904)。次に、画像の輝度分布に対して度数分布を作成し、その度数分布に基づいて鉄筋、影、背景の3つの領域における代表輝度値を計算し、各代表輝度値を用いて、各エッジに挟まれた領域をいずれかに特定する(S905)。さらに、特定した領域のうち、エッジを挟んで隣り合う領域が同じである場合、その2つの領域を1つの領域として統合する(S906)。
(もっと読む)
光学式位置検出装置および入力機能付き表示システム
【課題】検出空間を拡張した場合でも、装置を大型化せずに対象物体の位置を精度よく検出することができる光学式位置検出装置、および入力機能付き表示システムを提供すること。
【解決手段】光学式位置検出装置10では、光源部12から検出光を出射した際、受光部13は対象物体Obからの反射光を第1受光素子131および第2受光素子132で受光する。第1受光素子131および第2受光素子132は、第1受光素子131の受光面131aに対する法線方向と第2受光素子132の受光面132aに対する法線方向との交差角度θcが90°を超え、180°未満となる値、好ましくは、120°を超え、140°未満となる値に設定されている。
(もっと読む)
路面画像処理システム及び路面画像処理方法
【課題】ラインカメラの画像からラインカメラの視野範囲が移動した軌跡を特定し、路面全体の画像を正確に生成することが可能な技術を提供する。
【解決手段】本発明の路面画像処理システムは、車両と、車両に搭載されており、一方向に長い第1視野範囲内の路面を撮影する第1ラインカメラと、車両に搭載されており、一方向に長く、第1視野範囲と交差する第2視野範囲内の路面を撮影する第2ラインカメラと、車両の走行距離に応じて第1ラインカメラと第2ラインカメラに繰り返し撮影を指示する手段と、第1ラインカメラが撮影した画像系列にアフィン変換を施した画像と、第2ラインカメラが撮影した画像系列にアフィン変換を施した画像について、最も高い一致度を与えるアフィン変換パラメータを探索する手段と、探索されたアフィン変換パラメータに基づいて、第1視野範囲と第2視野範囲が交差する点の進行方向を算出する手段を備えている。
(もっと読む)
ふく進測定装置、ふく進測定システム及びふく進測定方法
【課題】簡素な構成でふく進量測定の作業効率や測定精度等を向上させる。
【解決手段】ふく進測定装置4は、鉄道のレール6R,6L上を走行する車両5に搭載され、車両走行中に、レール6R,6Lから側方に離れた位置で地面と一体的に設けられた基準マーカ2R,2Lと、レール6R,6Lと一体的に設けられたレールマーカ3R,3Lとを撮影するラインセンサ11R,11L,12R,12Lと、ラインセンサ11R,11L,12R,12Lで撮影された画像上において基準マーカ2R,2L及びレールマーカ3R,3Lを検出する画像処理部と、画像処理部で検出された情報から基準マーカ及びレールマーカのレール長手方向の位置を算出する位置算出部と、位置算出部で算出された各位置からレール6R,6Lのふく進量を算出するふく進量算出部と、を備えている。
(もっと読む)
画像形成装置および画像形成方法ならびに部品実装装置
【課題】安定した3次元認識画像を形成して正しい部品認識結果を得ることができる画像形成装置および画像形成方法ならびに部品実装装置を提供する。
【解決手段】計測対象面への入射方向を挟んで対称に配置され受光面の計測対象面に対する傾斜角度が各対毎に相異なる2対の位置検出素子群25A,25Bを有し、走査光の計測対象面からの反射光の受光位置を検出する位置検出部25と、各位置検出素子が受光する光量が所定の範囲内にあるか否かを判定する受光量判定部34と、同一の位置検出素子群に属する位置検出素子による反射光の受光位置検出結果の差異の大きさが所定の基準値以下であるか否かを判定する受光位置検出結果判定部35とを備え、位置検出部25の受光位置検出結果に基づき受光量判定部34および受光位置検出結果判定部35の判定結果を加味して計測対象面の3次元認識画像を形成する構成とする。
(もっと読む)
形状測定装置
【課題】測定範囲および測定精度を調整・変更可能なプローブを備えた形状測定装置を提供する。
【解決手段】ワークに直線状の光を照射する光照射部と、光照射部から照射された光のワークからの反射光を撮像する撮像素子32と、ワークからの反射光を撮像素子32の撮像面に結像させる結像レンズ31と、を備え、光照射部の光照射面と、結像レンズ31の主点を含む主平面と、撮像素子32の撮像面とが、シャインプルーフの条件を満たした形状測定装置であって、撮像素子32の撮像面を複数の領域(S1〜S3)に分割し、測定精度及び/又は測定範囲の大きさに応じて、複数の領域から測定に利用する領域を画像取得領域として選択する制御部10を備える。
(もっと読む)
表面検査装置のシェーディング補正方法
【課題】シェーディングの状態や、その雑音成分が変化しても、リアルタイムにシェーディング補正が可能な表面検査装置のシェーディング補正方法を提供することを目的とする。
【解決手段】予め記憶された前回走査時までの走査検出信号で生成した第1のシェーディング補正信号s8を元にして閾値信号s3、s4を生成し、今回の走査時の走査検出信号s1に含まれる欠陥部に対応する位置の信号値を第1のシェーディング補正信号s8で置換してアルタイムに補正走査信号s6を求め、今回の走査時の走査検出信号を正規化するようにしたことを特徴とする表面検査装置のシェーディング補正方法。
(もっと読む)
パッケージのサイズを測定するための装置
【課題】正確な測定、使用の容易さおよび効率、適応性および柔軟性を有するレセプターモジュールの複数の信号レセプターを調整する方法を提供する。
【解決手段】各レセプターに対して、(a)レセプターを最大の信号にさらす工程と、(b)レセプターの出力を最大の信号から測定する工程と、(c)レセプターを最小の信号にさらす工程と、(d)レセプターの出力を最小の信号から測定する工程と、(e)最大の信号から所定基準の最大に出力をマッピングし、最小の信号から所定基準の最小に出力をマッピングするマッピング機能を決定する工程と、(f)複数の測定における使用に対して、レセプターモジュールに結合されたローカル制御装置においてマッピング機能を記憶する工程とを含む。
(もっと読む)
変位センサ
【課題】計測や感度調整の精度を保証しながら、対象物の種類や計測目的に応じて受光処理の内容を容易に変更する。
【解決手段】受光部1にCMOSリニアイメージセンサ100が導入された変位センサにおいて、CPU3は、リセット信号RSETによりCMOSリニアイメージセンサ100の各画素部の蓄積電荷をリセットした後に、投光制御信号LDONを出力し、ついで受光制御信号PDSWを出力して各画素部に電荷の蓄積を開始させる。また、投光制御信号LDONの出力を終了するより前に受光制御信号PDSWの出力を終了し、読出制御信号STを用いて画像の出力を指示する。また、CPU3は、投光制御信号LDONとの出力の関係を維持することを条件として、CMOSリニアイメージセンサ100から出力された画像中のピークの値に基づき、受光制御信号PDSWを出力する期間の長さを調整する。
(もっと読む)
光電変換素子、欠陥検査装置及び欠陥検査方法
【課題】コストを増加させずに処理の高速化と解像度の変更が可能な光電変換素子と、それを用いた欠陥検査装置及び欠陥検査方法を提供する。
【解決手段】複数のセンサ画素を有する光電変換素子1において、マルチプレクサ5と、複数の水平転送レジスタ3a〜3dとを有する。センサ画素は、水平転送レジスタ3a〜3dのそれぞれに対応するように、複数のブロック2a〜2dに分割される。複数のブロック2a〜2dの電荷が、対応するそれぞれの水平転送レジスタ3a〜3dを介してマルチプレクサ5に読み出され、マルチプレクサ5を介して出力されるように構成する。
(もっと読む)
欠陥検査装置
【課題】欠陥検査装置では検出倍率を上げて微細欠陥検出感度を向上させるため、焦点深
度が浅くなり、環境変動によって結像位置がずれ、欠陥検出感度が不安定になる課題があ
る。
【解決手段】被検査基板を搭載して所定方向に走査するXYステージと、被検査基板上の
欠陥を斜めから照明し、その欠陥を上方に配した検出光学系で検出する方式で、この結像
状態を最良の状態に保つために、温度及び気圧の変化に対して、結像位置変化を補正する
機構を備えたことを特徴とする欠陥検査装置。
(もっと読む)
シートに塗工された塗工パターンの形状測定方法及び装置
【課題】塗工パターンの幅方向および搬送方向の測定の同時性を実現し、光軸方向の距離変動の影響も無くすことができる塗工パターンの測定方法及び装置を提供する。
【解決手段】 シートに塗工された塗工パターンの形状測定方法において、
1)シートの搬送方向に直交して水平ラインの撮影方向に複数のカメラを並べ、前記シートを前記複数のカメラで撮影する工程、
2)撮影した映像の水平走査信号または垂直走査信号の少なくとも一方を水平走査に同期させ前記複数のカメラの水平走査信号を順次切り替えて画像処理手段に取り込む工程を含んでいる。
(もっと読む)
画像測定機、プログラム、及び画像測定機のティーチング方法
【課題】ティーチング操作の作業性や効率を向上させる。
【解決手段】ワークの閉領域情報を有するガーバーデータを記憶するデータ記憶部131と、ガーバーデータの閉領域情報に基づくパターン画像を表示する表示部4と、パターン画像に重ねて、検出すべきエッジ位置、検出方向及び検出長さを指定する検出ツールSを表示部4に表示させる検出指定情報表示プログラム133と、ワークの検出ツールSに対応する領域を撮像する撮像プログラム134及び撮像部3と、撮像された画像のデータに対して、検出ツールSにより指定された検出方向及び検出長さで検出すべきエッジ位置のエッジ検出を行うエッジ検出プログラム141と、エッジ検出を行う場合、検出方向に沿って画像が明部から暗部に変化するか又は暗部から明部に変化するかを示す明暗変化条件を、ガーバーデータを用いて決定する条件決定プログラム140と、を備える。
(もっと読む)
スケール体、位置検出装置、ステージ装置、及び露光装置
【課題】スケール用のパターンが形成されたパターン形成面の法線方向の位置情報を高精度に計測する。
【解決手段】スケール体28eは、Yスケール39Y2が形成されたパターン板4eと、パターン板4eに設けられ、Yスケール39Y2を覆うカバーガラス5と、カバーガラス5の表面に形成され、互いに異なる波長域の第1の光及び第2の光に対して波長選択性を有する波長選択膜7と、を備え、波長選択膜7を介してカバーガラス5を透過する第1の光の透過率は、カバーガラス5のみを透過する第1の光の透過率より低く、波長選択膜7を介してカバーガラス5を透過する第2の光の透過率は、波長選択膜7で反射する第2の光の反射率より高い。
(もっと読む)
人物動作検出装置、遊具装置、人物動作検出方法、ゲーム方法、制御プログラムおよび可読記録媒体
【課題】多数の空間領域を面状に演算処理する場合に、高いフレームレートでも演算量が膨大にならず、撮像範囲における人物動作の方向と距離の変化量を高精度に検出する。
【解決手段】TOF式距離画像センサ31からの距離情報に基づいて人物の動作情報を検出する高速人物動作検知制御手段4は、TOF式距離画像センサ31からの距離情報に基づいて時系列に複数の距離フレームを生成する距離フレーム生成部431と、少なくとも2つの距離フレームに基づいて、人物に距離変化のない距離情報である距離平衡フレーム(背景画像フレーム)を生成する距離平衡フレーム生成部432と、複数の距離フレームについてそれぞれ距離平衡フレームとのフレーム差分を演算し、フレーム差分から人物の動作情報として人物の距離の変化量と変化方向を算出するフレーム差分演算部46とを有している。
(もっと読む)
刃先位置検出方法および刃先位置検出装置
【課題】刃先位置を正確に検出することができる刃先位置検出方法を提供すること。
【解決手段】カメラで撮像した画面の中に工具刃先を位置させた状態で、当該画面内で所定の走査方向に所定間隔で第1のサンプリング走査を行い、当該走査の際に明度変化点に基づいて前記工具刃先の上側稜線上の点および下側稜線上の点を認識する工程と、前記認識された2本の稜線上の点をそれぞれ関連付けて2本の一次近似直線を最小自乗法によって求める工程と、前記2本の一次近似直線の各々についてそれと垂直な方向に所定間隔で第2のサンプリング走査を行い、当該走査の際に明度変化点に基づいて前記工具刃先の上側稜線上の点および下側稜線上の点を改めて認識する工程と、前記改めて認識された2本の稜線上の点をそれぞれ関連付けて2本の二次近似直線を最小自乗法によって求める工程と、前記二次近似直接の交点を刃先として工具刃先位置座標を得る工程と、を備える。
(もっと読む)
三次元形状計測装置、三次元形状計測方法、および三次元形状計測プログラム
【課題】計測レンジを維持しつつ、計測可能な高さを簡便に拡張する。
【解決手段】計測対象に投影された、位置に応じて周期的に輝度が変化する光パタンを解析することによって、計測対象の三次元形状を計測する三次元形状計測システムは、計測対象の高さの基準面を有する取付台に計測対象が取り付けられ、計測ヘッドが計測対象および基準面に光パタンを投影して撮像し、変位部が計測ヘッドを高さ方向へ変位させる。撮像された画像の或る画素における光パタンの位相を位相算出部75が算出し、算出された位相に基づいて高さ算出部77が計測対象の高さを算出し、算出された高さに基づいて送り量算出部78が変位部を変位させるべき変位量を算出する。高さ算出部77は、位相算出部75が算出した位相に基づいて高さを算出し、算出した高さを、変位量に基づいて補正することにより、計測対象の高さを算出する。
(もっと読む)
変位センサシステム及び変位センサ
【課題】反射率が不均一な対象物でも表面形状等を測定することが可能な変位センサシステム及び変位センサを提供する。
【解決手段】変位センサシステム1は、二次元撮像素子15の撮像面15A上の複数の領域Eを指定する領域指定部33と、指定された領域Eごとに対応して個別の投受光感度を設定可能な感度設定部20と、各領域内の走査線Lの受光信号を、当該領域に対応する投受光感度下で受光処理部17に取り出させ、その取り出された受光信号に応じた検出処理を実行する受光制御部20と、を備える.
(もっと読む)
透過型センサ、位置ズレ検出装置、位置ズレ検出方法、プログラム、及び記録媒体
【課題】簡単な構成で媒体の位置ずれを検出することができる透過型センサ、位置ズレ検出装置、位置ズレ検出方法、プログラム、及び記録媒体を提供する。
【解決手段】媒体のエッジ近傍を照射する発光部と、発光部からの光を受光する受光部と、媒体と受光部との間に配置され複数の開閉領域を有する開閉手段と、を備えた。
(もっと読む)
1 - 20 / 48
[ Back to top ]