
Fターム[2F065MM28]の内容
光学的手段による測長装置 (194,290) | 走査形態 (5,021) | 受光系による走査 (768) | 投光系との同期 (240)
Fターム[2F065MM28]に分類される特許
141 - 160 / 240
溶液の塗布装置及び塗布方法
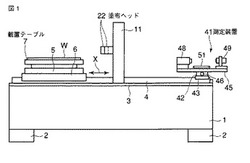
【課題】この発明は塗布ヘッドのノズルから吐出される溶液の量を精度よく測定することができる塗布装置を提供することにある。
【解決手段】基板に溶液を供給塗布する溶液の塗布装置であって、
溶液を吐出するノズルを有する塗布ヘッド22と、塗布ヘッドに設けられ電圧が印加されることで作動してノズルから上記溶液を吐出させる圧電素子と、ノズルから吐出された溶液の長さを検出する測定装置41とを具備する。
(もっと読む)
焦点面傾斜型共焦点表面形状計測装置

【課題】
本発明は、共焦点撮像系によりZスキャン機構無しで物体の表面形状計測を可能とした焦点面傾斜型共焦点表面形状計測装置において、高速計測時に著しく露光時間が短くなることから三次元形状計測で異常をきたす問題が生じる為、露光時間を多く確保して適度な光量を得た画像を取得し、正常に三次元形状計測を可能とすることを目的とする。
【解決手段】
焦点面傾斜型共焦点表面形状計測装置の移動機構による物体の移動と微小シフト機構によるスポットの移動とを等速とすることにより、共焦点撮像系が物体に対して同じ箇所を長時間露光可能なように構成し、三次元形状計測を行う。
(もっと読む)
光断層画像化装置
【課題】光断層画像化装置において、偏光方向の調整をすることなく良好な画質の断層画像を低コストで取得する。
【解決手段】光断層画像化装置100は、測定光L1を測定対象Sに照射させて所定の走査周波数で走査させて測定対象Sの断層画像を取得する。光断層画像化装置100における、光源ユニット10内または光源ユニット10から合波手段4までの光L、測定光L1、参照光L2、反射光L3の光路の少なくとも1つに、時間的に平均したときに出力光が無偏光となるように入力光の偏光状態を走査周波数と同等もしくはそれ以上に高い周波数で変化させる無偏光化手段70を設ける。
(もっと読む)
レーザ加工装置
【課題】レーザ加工される被加工対象物の表面の高さの変動に対応して、表面に加工用レーザを結像もしくは集光する光学素子の高さ位置を制御し、常時焦点を合わせる。
【解決手段】加工用レーザを被加工対象物5の表面に集光する対物用光学装置6と、被加工対象物5の加工用レーザが照射される部位の高さ位置を測定する高さセンサ1を備える。被加工対象物5の表面の高さ位置の変動に対応して対物用光学装置6を上下に移動し、常時焦点を被加工対象物に合わせる。高さセンサ1は、対物用光学装置6の加工用レーザの移動方向の先側に配置され、加工用レーザが照射される前に高さ位置を測定する。加工用レーザの照射位置が測定位置に達する毎に、測定された高さ位置に対応して対物用光学装置6を移動する。これにより、高さ位置の測定と対物用光学装置6の移動を独立して行え、加工用レーザの移動速度を速くしても、追随して対物用光学装置6を移動できる。
(もっと読む)
鉄道のプラットホーム測定装置及び測定方法
【課題】軌道とプラットホーム端部との距離を精度良く測定でき、かつプラットホーム端部の表面形状も測定できる操作性に優れた測定装置を提供する。
【解決手段】 軌道10上を走行可能な台車51と、台車51の走行距離を測定し、一定走行距離毎に電気信号を出力する距離測定手段(走行距離センサ57、コントローラ65)と、台車51上に設置され、前記電気信号が出力される毎にプラットホーム20の端部の、軌道10と直交する方向の縦断プロファイルを測定する非接触位置センサ64と、データ収集装置70とを具備する。データ収集装置70は測定データから軌道10に対する前記端部の距離を算出する手段と、その算出値と管理値とを比較する手段と、比較結果を表示する手段と、測定データ及び比較結果を記憶する手段を備える。
(もっと読む)
光学式位置検出装置
【課題】表示領域の大型化を図ることが可能な光学式位置検出装置を提供すること。
【解決手段】画像を表示するための液晶ディスプレイ1と、液晶ディスプレイ1を挟んで互いに平行に配列された複数の発光素子2a〜2tおよび複数の受光素子3a〜3tと、複数の発光素子2a〜2tおよび複数の受光素子3a〜3tを駆動制御するための制御手段4と、を備えたタッチパネルA1であって、制御手段4は、複数の発光素子2a〜2tのうち互いに隣り合う2つの発光素子2f,2gを同時に発光させ、複数の受光素子3a〜3tのうち発光素子2f,2gと対面する1つの受光素子3qによって2つ発光素子2f、2gからの光が受光されないときに、2つの発光素子2f,2gと受光素子3qとの間に指Fgが存在すると判断する構成とされている。
(もっと読む)
表面検査装置
【課題】被検査物の表面に存在する加工部が欠陥の有無の判別に与える影響を排除して正確な検査を実施でき、かつ処理の高速化を図ることが可能な表面検査装置を提供する。
【解決手段】被検査物の円筒状の表面に対応する2次元画像内の濃度値に基づいて欠陥の有無を判別する表面検査装置において、2次元画像上に出現すべき加工部の像203a〜203a、204を、加工部毎に別々の基準画像211、212として保持するとともに、表面の軸線方向に相当する軸線相当方向における加工部の像の位置y1、y2、及び表面の周方向に相当する周相当方向に関して同一の加工部の像が存在すべき個数を基準画像211、212と対応付けて保持する。基準画像、該基準画像に対応付けられた位置及び個数に基づいて、2次元画像上で欠陥判別の対象から除外されるべき領域を特定し、その特定された領域外における画素の濃度値に基づいて欠陥の有無を判別する。
(もっと読む)
ボリュメトリック・フィルタリング法を使用して光コヒーレンス・トモグラフィ画像形成の機能を向上させる装置及び方法
本発明による装置及び方法を提供することが可能であり、少なくとも1つの第1電磁放射線を含む特定の放射線が少なくとも1つのサンプルに向けられ、且つ、少なくとも1つの第2電磁放射線が基準に向けられる。特定の断面幅を有する第1電磁放射線をサンプルの少なくとも一部分に印加し、少なくとも1つの第3電磁放射線を生成することが可能である。特定の断面幅に対する0.5の乗数と100の乗数との間の所定の乗数に相当する距離について特定の軸に沿って、サンプルの少なくとも一部分内で第1電磁放射線を並進運動させることが可能である。第1電磁放射線に関連する第3電磁放射線と第2電磁放射線に関連する少なくとも1つの第4電磁放射線との間において干渉を検出することが可能である。更には、第1電磁放射線の非対称断面エリアを提供することが可能である。 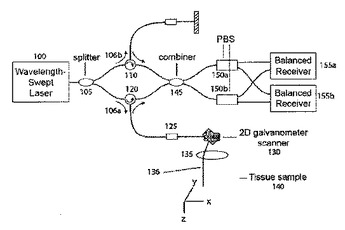 (もっと読む)
(もっと読む)
結晶方位同定方法及び結晶方位同定装置
【課題】簡便に結晶方位の同定が可能であって、しかも微細な結晶粒に対して適用可能であり、被検体に含まれる添加物の影響を受けにくい結晶方位の同定方法及び結晶方位同定装置を提供する。
【解決手段】圧子を結晶体における所定の結晶粒に押し込んで圧痕を形成する圧痕形成手段と、圧痕の形状を計測する圧痕形状計測手段と、圧痕の形状から結晶方位を同定する解析手段とを備え、解析手段では、圧子で形成される理想的な圧痕の形状と、圧痕形状計測手段で計測した圧痕の形状との差に基づいて結晶方位を同定する。
(もっと読む)
光半導体素子、波長可変光源、および光断層画像化装置
【課題】光半導体素子において、発光スペクトル幅が広く、かつ出力が高い光を発生させる。
【解決手段】光半導体素子1には、光導波路型発光領域である導波路2、3、4と、出射用光導波路である導波路5とが形成されている。導波路2、3、4の長さS1は互いに等しいように構成されている。導波路2、3、4で発生した各光は、導波路5に入射して合波され、合波された光は、導波路5により外部に出射される。
(もっと読む)
逐次多点式真直度測定法および測定装置
【課題】
大型液晶用マスク基板、大型機械加工面、大型定盤基準面などの長尺での真直度測定では、超精密駆動基準軸や超精密水準器、レーザー反射式コリメータなどが使用されている。
特に、大型マスク基板での1mを越す長尺測定では超精密駆動基準軸は高価格であり、水準器やコリメータでは被測定物との接触が問題となる。そこで、低価格で非接触式の高精度測定システムが求められている。
【解決手段】
本発明は、従来の遂次3点測定法の欠点である多数点測定での累積誤差の増大、測定ピッチの制限を改良した。遂次3点測定での累積誤差は測定点数の2乗に比例している。本発明では長尺の全長を数ブロックに分割し、ブロック間を3個のセンサー21,22,23による従来の3点法で計測し、ブロック内は4個目のセンサー24で同時信号処理にて測定し、累積誤差の大幅な軽減化と測定ピッチの任意化が可能となった。
(もっと読む)
3次元形状測定装置及び3次元形状測定方法
【課題】鏡面反射する表面の形状を高精度に測定することができる3次元形状測定装置及び3次元形状測定方法を提供することを目的とする。
【解決手段】測定対象物Tの鏡面反射する表面Sの形状を測定する3次元形状測定装置100であって、波状の濃度分布を有するパターンを表示する表示手段10と、表示手段10に表示されるパターンをシフトするシフト手段と、表示手段10に表示されるパターンを写し出した表面Sを異なる2方向から撮影する撮影手段20A,20Bと、撮影手段20A,20Bが表面Sの重複した範囲を撮影して得た画像データの対応付けにより当該範囲の表面Sの形状を求める表面形状解析手段と、を備える3次元座標計測装置100。
(もっと読む)
車両用レーンマーク認識装置
【課題】直線道路やカーブ道路におけるレーンマークを認識することができる車両用レーンマーク認識装置を提供する。
【解決手段】今回のサイクルでの車線中心線の位置や形状、車線幅の予測結果を用いて、レーンマークに対応するデータを抽出し(ステップS4)、この抽出したデータの車軸方向成分(x軸の成分)を補正して車線中心線に相当するデータを生成し(ステップS5)、この生成したデータを用いたハフ変換処理により、車線中心線の位置や形状を算出する(ステップS6)。続いて、ステップS4で抽出したデータの車線中心線からの相対位置の度数分布を算出し(ステップS7)、この度数分布に対して自己相関関数を演算して、道路の車線幅を算出する(ステップS8)。ステップS9では、カルマンフィルタによって、今回のサイクルや数サイクル後における車線中心線の位置や形状、車線幅を推定/予測する。
(もっと読む)
光学走査プローブ
【課題】 対象物を光ストライプで照射し、対象物表面から反射した光を検出することで、対象物の表面上の複数の点からデータを捕捉するための走査プローブ(2)に関する。走査プローブは、(a)光ストライプ(55)を生成および発するためのストライプ生成手段(14)、(b)対象物表面から反射した光ストライプを検出するための画素の配列を有する画像センサを備えるカメラ(16)、(c)カメラ(16)によって検出された強度に応じて、フレームの取得中に光ストライプ(55)の強度を調節するための手段を備える。ストライプ長を修正する手段、処理手段のための隔離された区分室、およびスキャナのための取り付け可能なダストカバーを有するスキャナにも関する。 (もっと読む)
物体の表面輪郭を測定するための顕微鏡および顕微鏡検査方法
各部分に対して所定のレンズ後焦点領域が照明され、照射光と物体(OB)との間の相互作用によって試料光が発生されるように、異なる波長を有する照射光を該物体(OB)の種々の表面部分に向ける照明モジュールと、検出モジュールであって、該検出モジュールがスキャナ(5)を用いて試料光を検出光路の中に向け、かつレンズ後焦点領域の各被検出後焦点に対して該検出光路の中へ向けられた試料光のそれぞれ1つの別の波長を平面内で共焦点に結像し、共焦点に結像された試料光の強度を波長に依存して検出し、かつそこから物体(OB)の対応する表面部分の位置を導出し、スキャナ(5)と該平面との間に配置され、かつ試料光が通り抜ける調整可能な色波長誤差を含むカラーモジュール(9)を有し、その結果、該色波長誤差の変化によって被検出後焦点が調節可能であることによって、時間的に相前後して各部分の試料光を検出する検出モジュールとを備える、該物体(OB)の表面輪郭を測定するための顕微鏡が提供される。  (もっと読む)
(もっと読む)
共焦点走査型顕微鏡システム、及びそれを使用した観察方法
【課題】試料の測定対象面に段差が存在する場合、反射率の異なる部位が存在する場合、または透過面が存在する場合においても、これらの影響を受けずに測定を行うことができる共焦点走査型光学顕微鏡システムを提供する。
【解決手段】共焦点走査型光学顕微鏡システムは、試料の測定対象範囲となる領域を複数に分割した領域である分割領域と、該分割領域に対応して設定される該分割領域についての光軸方向に関する観察範囲である分割領域観察範囲と、を設定し、相対位置変位手段によりその各分割領域観察範囲を試料を変位させて、該分割領域観察範囲内で取得された2次元画像の各画素データから代表となる画素データである代表画素データを取得し、その代表画素データに基づいて、観察画像を構築することにより、上記課題を解決する。
(もっと読む)
PDP用基板の欠陥検査方法
【課題】PDPを製造する際に、基板上の突起の検出を高精度に行うことができる欠陥検査方法を提供する。
【解決手段】基板を載せるステージ22と、そのステージ22の上面に対して平行にレーザー光を照射するレーザー照射装置23およびレーザー光を受光する受光装置24を有する検出装置とを備えた欠陥検査装置21を用い、基板上に誘電体層が形成されてなるPDP用基板20をステージ22上に載せて、レーザー照射装置23からレーザー光を照射しながら、PDP用基板20がレーザー照射装置23と受光装置24との間を通過するように、少なくともPDP用基板20または検出装置を移動させてレーザー光を受光装置24で受光し、その受光による信号レベルの変化から突起の大きさを求めるステップ1と、前記突起の大きさを用いて良否判定を行うステップ2とを有する。
(もっと読む)
基板の裏面の反り測定方法
【課題】基板の裏面の反りを測定する方法を提供する。
【解決手段】本基板の裏面の反り測定方法は、基板検出ステップS1と最適平面算出ステップS5と、算出ステップS6とを含む。また、本基板の裏面の反り測定方法において、基板検出ステップS1後、最適平面算出ステップS5前に、ノイズ除去ステップS2および外周部除去ステップS3、外周部除去ステップS3および平滑化ステップS4、またはノイズ除去ステップS2、外周部除去ステップS3および平滑化ステップS4を含むことができる。
(もっと読む)
3次元変位ひずみ計測方法及び装置
【課題】位相シフトデジタルホログラフィを用いた変位計測において、3次元変位計測を一挙に且つ短時間で行う手法を提供する。また、変位計測手法によって得られた変位分布からひずみ分布を算出する手法も提供する。
【解決手段】a) 計測物体に3つの異なる方向から同一波長の物体光を照射し、b) 物体光と同一波長を有する3つの参照光と計測物体からの反射光との干渉像を、各参照光の位相を互いに異なる速度で物体光に対して変化させつつ複数枚、2次元撮像素子で撮影し、c) フーリエ変換を用いて位相変化速度の異なる干渉成分を抽出することにより3つの物体光による干渉像を分離し、d) 各干渉像より、各物体光の照射方向に応じた方向の計測物体の変位分布を計測することにより計測物体の3次元変位を計測する。
(もっと読む)
波長可変レーザ装置および光断層画像化装置
【課題】外部共振器型の波長可変レーザ装置において、小型化とともに、高速かつ安定した波長掃引を可能にする。
【解決手段】レーザ装置10は、半導体レーザ媒質11と、半導体レーザ媒質11から射出した光を波長分散する分散素子である回折光学素子13と、波長分散された光が入射される空間変調素子15とを備える。空間変調素子15は、制御信号に応じて光を変調する複数の画素15aを有し、波長分散された光の一部を選択的に反射して帰還させて戻り光とする。半導体レーザ媒質11と空間変調素子15が外部共振器の両端部を構成し、半導体レーザ媒質11の射出端面11aから、戻り光の波長のレーザ光L0が射出される。
(もっと読む)
141 - 160 / 240
[ Back to top ]