
Fターム[2F065QQ26]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 信号の比較、減算 (4,276) | 比 (553)
Fターム[2F065QQ26]に分類される特許
81 - 100 / 553
乗員検知装置
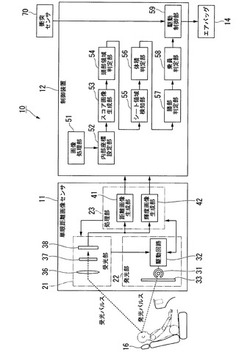
【課題】大人と子供とを精度良く判別する。
【解決手段】乗員検知装置10は、単眼距離画像センサ11から出力される距離画像に基づき、乗員領域の体積を推定し、該体積が所定体積閾値以上であるか否かを判定する体積判定部56と、車両上下方向の所定位置よりも下方側に車室内の乗員の膝部が存在するか否かを判定する膝部判定部57と、体積判定部56により乗員領域の体積が所定体積閾値以上であると判定された場合であって、膝部判定部57により所定位置よりも下方側に膝部が存在すると判定された場合には乗員は大人であると判定し、膝部判定部57により車両上下方向の所定位置よりも下方側に膝部が存在しないと判定された場合には乗員は子供であると判定する乗員判定部58とを備える。
(もっと読む)
3次元情報取得方法、3次元情報取得装置、および3次元情報取得プログラム

【課題】被写体を2次元で表現する画像に基づき被写体の3次元空間内における奥行きを示す3次元情報の検出精度を高めること。
【解決手段】3次元の対象物を2次元で表わす画像の画像データを入力する画像入力ステップと、前記画像データに基づき前記画像の特徴量を示す特徴量情報を、前記画像を複数個に分割した分割エリア毎に取得する特徴量取得ステップと、3次元の対象物を2次元で表わす画像内における任意のサンプリングポイント毎に、当該サンプリングポイントの画像の特徴量を示すサンプリングポイント特徴量情報と、仮想3次元空間において前記対象物を表現した場合の前記サンプリングポイント同士の水平方向の間隔を示す3次元情報とをそれぞれ対応付ける3次元情報テーブルを参照して、前記特徴量情報が示す前記分割エリアの画像の特徴量と対応する前記3次元情報を取得する3次元情報取得ステップと、を含むことを特徴とする。
(もっと読む)
膜厚測定方法および装置
【課題】フィルムの表面と裏面から反射した光の分光スペクトルによるパワースペクトルのピークからこのフィルムの膜厚を測定する膜厚測定装置は、フィルムの膜厚が厚いと測定ができなくなり、また複屈折性を有するフィルムはピークが双峰性を有するので、誤差が大きくなる。本発明は、膜厚が厚くかつ複屈折性を有するフィルムでも正確な測定ができる膜厚測定方法および装置を提供することを目的にする。
【解決手段】フィルムに偏光した光を照射し、フィルムを透過した光からリタデーションを演算し、このリタデーションとフィルムの屈折率差から膜厚を演算する。膜厚が厚く、かつ複屈折性を有するフィルムの膜厚を正確に測定できる。
(もっと読む)
接触可能性検知装置、接触可能性検知方法、及びプログラム
【課題】対象車両の自車両への接触の可能性の有無の判定精度を向上させる。
【解決手段】測距部11は、自車両と対象車両との間の距離の計測を行う。方位角変化率算出部12は、自車両に搭載されている車載カメラ2が対象車両を撮像して得た時系列の撮像画像に基づいて、当該対象車両の水平線方向の端部を当該自車両から見たときの方位角の時間変化率を算出する。そして、判定部13は、測距部11により計測された距離と、方位角変化率算出部12により算出された、前述の方位角の時間変化率とに基づいて、対象車両の自車両への接触の可能性の有無を判定する。
(もっと読む)
スクリーンマスクの計測装置および印刷装置
【課題】開口部の寸法を正確に計測することが可能なスクリーンマスクの計測装置を提供する。
【解決手段】この印刷装置100は、スクリーンマスク90の上面90aを撮像して開口部91の画像を取得するカメラ15と、カメラ15からスクリーンマスク90の上面90aまでの距離LZを測定するために設けられたレーザポインタ16と、カメラ15およびレーザポインタ16を用いて測定された距離LZに基づいて、撮像された画像に基づくデータを実寸法に換算する換算係数SZを調整する制御部85とを備える。
(もっと読む)
位置および動作判定方法および入力装置
【課題】被検出体の位置を検出するとともに、被検出体の動作を的確に、かつ、高精度に判定する。
【解決手段】被検出体から発せられた赤外線を受光した赤外線検出部から出力される赤外線検出信号に基づいて、被検出体の位置および動作を判定する位置および動作判定方法であって、赤外線検出部は視野角制限体を有する少なくとも2個の赤外線センサ部を有し、2個の赤外線センサ部からそれぞれ得られる赤外線の強度の差または比をあらわす被検出体の位置信号と、赤外線の強度の各々の差または比を時間の関数とし、時間で微分することにより得た信号と、に基づいて被検出体の動作を判定する。
(もっと読む)
高さ測定方法および荷電粒子ビーム描画装置
【課題】試料に形成されたパターンに起因する高さ測定誤差を低減して、描画精度の向上を図ることのできる高さ測定方法および荷電粒子ビーム描画装置を提供する。
【解決手段】本発明の一態様によれば、高さ測定方法は、高さの基準となる範囲を決定する工程と、PSDを含むアナログ信号処理回路上でのオフセット値を求める工程と、PSDの出力値からオフセット値を差し引いた値を用いて試料の高さの測定データを求める工程と、試料の高さの測定データの内で基準となる範囲に含まれない値を除き、残った値を用いてフィッティングを行い、試料の高さデータを作成する工程とを有する。
(もっと読む)
光学式位置検出装置、および表示装置
【課題】少ない部品で複数の対象物体の位置を高い分解能で検出することのでき、さらには、少ない部品で対象物体の三次元座標を高い分解能で検出することのできる光学式位置検出装置を提供すること。
【解決手段】光学式位置検出装置10では、導光部材40、第1検出用光源121および第2検出用光源122を備えた線状光源ユニット13が複数並列配置されており、点灯した線状光源ユニット13が切り換わった際の光検出部30での受光結果によりY軸方向(第1方向)における対象物体Obの位置を検出する。また、第1検出用光源121と第2検出用光源122とが順次点灯した際の光強度分布を利用してX軸方向における対象物体Obの位置を検出する。さらに、第1検出用光源121および第2検出用光源122が同時点灯した際の光強度分布を利用してZ軸方向における対象物体Obの位置を検出する。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】湾曲したフレキシブル基板に実装された複数の発光素子から出射された検出光を利用して対象物体の位置を検出する方式を採用するにあたって、発光素子を所定の位置に設けることのできる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置の光源部20では、帯状のフレキシブル基板40に複数の発光素子30が実装されており、複数の発光素子30は各々、検出光L2を出射する。フレキシブル基板40は、基板支持部材50の凸曲面55に重ねて配置されているため、フレキシブル基板40が長すぎた場合、フレキシブル基板40の端部を切り欠き511b、521bに差し込むことができる。このため、フレキシブル基板40が浮き上がることがない。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】導光板を用いた方式であっても、検出対象空間に強度が適正に単調変化する光強度分布を形成することができる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10において、光源用回転体13は、検出用光源12から出射された検出光L2を検出対象空間10Rに出射する。光源用回転体13において、第1導光部13A、13Cは一方側端部から他方側端部に向かって強度が単調増加する光を出射するのに対して、第2導光部13B、13Dは、第1導光部13A、13Cとは反対に、一方側端部から他方側端部に向かって強度が単調減少する光を出射する。従って、光源用回転体13が回転して、所定の角度位置に第1導光部13A、13Cが到来したときの光検出器30での受光結果を用いれば、対象物体Obの位置を検出することができる。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】少ない数の検出用光源部であっても、広い領域にわたって対象物体の位置を検出することのできる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10は、第1検出用光源部12Aおよび第2検出用光源部12Bから検出光L2を出射し、検出対象空間10Rの対象物体Obで反射した検出光L2の一部を光検出部30で受光して対象物体Obの位置を検出する。第1検出用光源部12Aおよび第2検出用光源部12Bは、検出対象空間10RからX軸方向で離間しており、光検出部30は、検出対象空間10Rから第1検出用光源部12Aおよび第2検出用光源部12BよりY軸方向で離間している。このため、検出光L2が対象物体Obで正反射して光検出部30に入射するような対象物体Obの特異位置を、よりX軸方向の外側にシフトさせることができる。
(もっと読む)
外径測定方法および外径測定装置
【課題】心合わせ作業をせずとも円柱状被測定体の外径を高精度に測定できる方法および装置を提供する。
【解決手段】半径が既知である基準円柱状被測定体の半径方向の変位を第1、第2、および第3の変位センサによってそれぞれ測定する第1の測定ステップ(S2)と、第1の測定ステップで測定した測定値を、それぞれ第1、第2、および第3の測定値として記憶する第1の記憶ステップ(S3)と、半径が未知である円柱状被測定体の半径方向の変位を第1、第2、および第3の変位センサによってそれぞれ測定する第2の測定ステップ(S4)と、第1の記憶ステップ(S3)で記憶された第1、第2、および第3の測定値と、第4、第5、および第6の測定値と、基準円柱状被測定体の半径とから、円柱状被測定体の半径を算出する演算ステップ(S6)とを含む。
(もっと読む)
容器の判別方法
【課題】画像処理によって廃棄物中に混在しているペットボトルを確実に判別可能とすることを課題とする。
【解決手段】被判別対象の撮影工程と、被判別対象の二値化画像を作成する二値化工程と、前記二値化画像から前記容器の口部分の形状を抽出する口部分形状抽出工程と、前記二値化画像の容器の口部分を含む画像部分を、容器を輪切りするように帯状に複数の区域に区分けする区域分け工程と、前記区域毎に容器に該当する領域の横幅をそれぞれ計測する横幅計測工程と、前記区域毎に、各区域において同一の方向に隣接する区域との前記横幅の差又は比率を求め、求めた値を判別値とする判別値演算工程と、前記判別値と事前に設定した閾値とを比較する形状判断工程とからなり、該形状判断工程での比較の結果に基づいて前記容器がペットボトルであるか否かを判別する、という技術的手段を講じた。
(もっと読む)
計測装置
【課題】参照面と被検面との間の絶対距離を広範囲、且つ、高精度に計測することができる技術を提供する。
【解決手段】参照面RSと被検面TSとの間の絶対距離を計測する計測装置1であって、互いに異なる吸収線をそれぞれ有する複数の種類のガスが封入されたガスセル112を含む波長基準素子と、参照面RSで反射された第1の光と被検面TSで反射された第2の光との干渉信号を検出して、参照面RSと被検面TSとの間の光路長に対応する位相を検出する位相検出部122と、波長基準素子を用いて、光源102から射出される光の波長を互いに異なる複数の吸収線に対応する互いに異なる複数の波長のそれぞれに設定し、互いに異なる複数の波長のそれぞれについて、参照面RSと被検面TSとの間の光路長に対応する位相を検出するように位相検出部122を制御して、前記絶対距離を求める処理を行う処理部128と、を有する。
(もっと読む)
欠陥検査方法、微弱光検出方法および微弱光検出器
【課題】
微小な欠陥を検出すること、検出した欠陥の寸法を高精度に計測することなどが求められる。
【解決手段】
光源から出射した光を、調整する照明光調整工程と、前記照明光調整工程により得られる光束を所望の照明強度分布に形成する照明強度分布制御工程と、前記照明強度分布の長手方向に対して実質的に垂直な方向に試料を変位させる試料走査工程と、照明光が照射される領域内の複数の小領域各々から出射される散乱光の光子数を計数して対応する複数の散乱光検出信号を出力する散乱光検出工程と、複数の散乱光検出信号を処理して欠陥の存在を判定する欠陥判定工程と、欠陥と判定される箇所各々について欠陥の寸法を判定する欠陥寸法判定工程と、前記欠陥と判定される箇所各々について、前記試料表面上における位置および前記欠陥の寸法を表示する表示工程と、を有することを特徴とする欠陥検査方法。
(もっと読む)
光学式検出装置、電子機器及び光学式検出方法
【課題】対象物の位置情報を演算し、対象物のZ位置情報に応じて、コマンド処理とホバリング処理とを適切に切り替えることが可能な光学式検出装置、電子機器及び光学式検出方法を提供すること。
【解決手段】光学式検出装置は、面状領域に沿う領域に照射光を照射する照射部と、対象物に反射した照射光の反射光を受光する第1及び第2の受光部と、第1及び第2の受光部の少なくとも一方の受光結果に基づいて、対象物の位置情報を演算する演算部と、を備え、第1の受光部と面状領域との距離は、第2の受光部と面状領域との距離よりも小さく、第1及び第2の受光部は、面状領域に沿う方向から入射する反射光を受光する。
(もっと読む)
三次元形状測定装置、三次元形状測定方法、構造物の製造方法および構造物製造システム
【課題】光源の光量に変化があった場合であっても、三次元形状を精度良く算出することができる。
【解決手段】三次元形状測定装置1は、メイン光源22が発光した光を縞パターンに変換して測定対象物11上に投影する投影部13と、測定対象物11を撮像する撮像部14と、投影部13が投影する縞パターンの位相を変化させながら、撮像部14に測定対象物11の撮像を繰り返しさせるとともに、縞パターンの画像を複数順に取得する制御部と、メイン光源22の光量の変化量を検出し、当該検出した変化量が所定の値以上である場合に、当該検出した変化量に基づいて前記縞パターンの画像を補正し、当該補正した縞パターンの画像に基づいて、測定対象物11の三次元形状を算出する形状算出部と、を備える。
(もっと読む)
高さの計測装置
【課題】 対象物の高さを高精度かつ迅速に計測することが可能な計測装置を提供する。
【解決手段】 計測範囲内にある対象物の高さを計測する計測装置は、複数の波長を含む光を出射する光源と、軸上色収差を有する光学ユニットを含み、前記光源から出射された光を複数の光束に分割して、前記計測範囲を含むが異なる焦点範囲に前記複数の光束を前記光学ユニットによって集光させる第1光学系と、前記複数の光束について前記対象物の表面に焦点位置を有する波長を検出する検出部と、前記第1光学系と光路の一部を共有していて、前記第1光学系によって集光され前記対象物の表面で反射された前記複数の光束を前記検出部に導く第2光学系と、前記複数の光束から1つの光束を選択し、該選択された光束の前記検出部により検出された波長を用いて前記対象物の高さを算出する処理部と、を備える。
(もっと読む)
反射型フォトセンサを用いた位置検出装置
【課題】磁気センサや大型マグネットを用いることなく、簡単な構成で、1mm以上の位置センシングが良好にでき、反射型フォトセンサの温度特性をキャンセルする。
【解決手段】1対の反射型フォトセンサPR1,PR2を対向配置し、この1対のフォトセンサ間に、可動体に取り付けられた両面反射板5を移動可能に配置し、これらフォトセンサPR1,PR2の2つの出力から反射板5の移動位置を検出する。この位置検出では、反射板の移動距離に応じてリニアな値が得られる演算式を用い、例えば1対の反射型フォトセンサの一方の出力をVo1、他方の出力をVo2とすると、(Vo1−Vo2)/(Vo1+Vo2)の演算式を用いて位置検出を行う。
(もっと読む)
容器の判別方法
【課題】画像処理によって廃棄物中に混在しているペットボトルを確実に判別可能とする方法を提供する。
【解決手段】選別対象の容器を撮影する撮影工程S1と、前記撮影工程で撮影して得られた画像情報から二値化画像を作成する二値化工程S2と、前記二値化画像から前記容器の口部分の形状を抽出する口部分形状抽出工程S3と、前記口部分形状抽出工程で前記形状が抽出された二値化画像から容器の首部及び口部の幅を計測する工程S4・S5と、前記工程で計測された首部の幅及び口部の幅の計測値を演算し、演算して求めた演算値と事前に設定した閾値とを比較する形状判断工程S6とからなり、前記形状判断工程での前記比較結果に基づいて前記容器が判別対象の容器であるか否かを判断する。
(もっと読む)
81 - 100 / 553
[ Back to top ]