
Fターム[2F065QQ26]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 信号の比較、減算 (4,276) | 比 (553)
Fターム[2F065QQ26]に分類される特許
141 - 160 / 553
位置検出機能付き機器
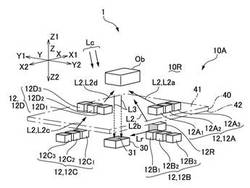
【課題】検出光の出射空間のサイズを可変にすることのできる位置検出機能付き機器を提供することにある。
【解決手段】位置検出機能付き機器1の光学式位置検出装置10Aにおいて、検出用光源部12が検出光L2を出射した際に対象物体Obで反射した検出光を光検出部30で検出して対象物体Obの座標を検出する。第1検出用光源部12A〜第4検出用光源部12Dは、第1発光素子12A1、12B1、12C1、12D1〜第3発光素子12A3、12B3、12C3、12D3を備えている。対象物体Obの検出空間10Rを広く設定する場合には、点灯する発光素子の数を増やして出射空間を広げる一方、対象物体Obの検出空間10Rを狭く設定する場合には、点灯する発光素子の数を減らして出射空間を狭める。
(もっと読む)
撮像装置、長さ測定方法、及びプログラム

【課題】被写体上の指定された2点間の長さを精度良く測定する撮像装置を提供する。
【解決手段】被写体の指定された2点間の長さを測定する。撮像動作部100は、同一の被写体に対する1回の撮像で、視差のある1組のペア画像を取得する。表示部310は、取得されたペア画像の少なくとも一方の画像に基づく表示画像を表示する。操作部330は、表示画像上における被写体上の始点及び終点の指定を受け付ける。制御部210は、1又は複数組のペア画像に基づいて、指定された被写体上の始点及び終点における実空間上のそれぞれの位置を算出し、算出した実空間上の始点及び終点位置に基づいて、被写体上の始点から終点までの長さを取得する。
(もっと読む)
位置検出機能付き機器
【課題】対象物体が検出用光源を配置した領域の外側にあるのか内側にあるのかを検出することのできる位置検出機能付き機器を提供すること。
【解決手段】位置検出機能付き機器1の光学式位置検出装置10において、検出用光源部12が検出光L2を出射した際に対象物体Obで反射した検出光を光検出部30で検出して対象物体Obの座標を検出する。検出空間10Rからみたときに、光検出部30は、複数の検出用光源部12より内側に位置するとともに、複数の検出用光源部12は各々、外側発光素子12A1〜12D1と内側発光素子12A2〜12D2とを備えている。従って、外側発光素子12A1〜12D1が点灯した際の光検出部30での受光強度と内側発光素子12A2〜12D2が点灯した際の光検出部30での受光強度との比較結果に基づいて対象物体Obが検出用光源部12より外側あるいは内側のいずれに位置するかを判定することができる。
(もっと読む)
位置検出機能付き機器
【課題】測定頻度を高めることに伴って対象物体の位置検出精度を高めることのできる位置検出機能付き機器を提供すること。
【解決手段】位置検出機能付き機器1の光学式位置検出装置10において、検出用光源12が検出光L2を出射した際に対象物体Obで反射した検出光を光検出部30で検出して対象物体Obの座標を検出する。検出空間10Rからみたときに光検出部30の周りで周方向で並ぶ第1検出用光源12A、第2検出用光源12B、第3検出用光源12Cおよび第4検出用光源12Dは、光検出部30からみて不等の角度間隔に配置されている。また、第1検出用光源12Aと第2検出用光源12Bとを結ぶ線と、第3検出用光源12Cと第4検出用光源12Dとを結ぶ線とが非平行で、第1検出用光源12Aと第4検出用光源12Dとを結ぶ線と、第2検出用光源12Bと第3検出用光源12Cとを結ぶ線とが非平行である。
(もっと読む)
サイズ測定装置
【構成】イメージセンサ16は、被写界を捉える撮像面で生成された被写界像を繰り返し出力する。CPU34は、イメージセンサ16から出力された被写界像から特定物体像を探索する処理を互いに異なる姿勢を各々が有する複数の参照用特定物体像を利用して繰り返し実行し、被写界に存在する特定物体の数を探索結果に基づいて検出する。CPU34はまた、検出された数に相当する特定物体のいずれもが姿勢条件を満足するか否かを探索結果に基づいて繰り返し判別し、判別結果が否定的な結果から肯定的な結果に更新されたときイメージセンサ16から出力された被写界像を記録する。
【効果】所望の物体のサイズを簡便に測定することができる。
(もっと読む)
位置検出機能付き機器
【課題】測定頻度を高めることに伴って対象物体の位置検出精度を高めることのできる位置検出機能付き機器を提供すること。
【解決手段】位置検出機能付き機器1の光学式位置検出装置10において、検出用光源12が視認面41の側に検出光L2を出射し、対象物体Obで反射した検出光を光検出部30で検出して対象物体Obの座標を検出する。検出空間10Rからみたときに光検出部30の周りで周方向で並ぶ第1検出用光源12A、第2検出用光源12B、第3検出用光源12Cおよび第4検出用光源12Dは、光検出部30からの距離が相違している。また、第1検出用光源12Aと第2検出用光源12Bとを結ぶ線と、第3検出用光源12Cと第4検出用光源12Dとを結ぶ線とが非平行で、第1検出用光源12Aと第4検出用光源12Dとを結ぶ線と、第2検出用光源12Bと第3検出用光源12Cとを結ぶ線とが非平行である。
(もっと読む)
焦点ズレ検出装置、焦点ズレ検出方法およびプログラム
【課題】探傷中においても撮像装置の焦点ズレを検知することができ、判定精度の劣化による不良品の流出等を防止する焦点ズレ検出装置を提供する。
【解決手段】本発明の焦点ズレ検出装置は、搬送される被検査体の表面を撮像装置により撮像した画像データに基づいて、表面欠陥を検査する表面欠陥検査装置において、撮像装置の焦点ズレを検出する。かかる焦点ズレ検出装置は、画像データの画像信号を2次元配列された周波数成分に変換する変換演算を行う演算部と、画像データの周波数成分の2次元配列を、所定の規則に基づいて、1次元配列に変換する配列変換部と、1次元配列に変換された周波数成分の一部によって形成される波形の傾きに基づいて、撮像装置の焦点ズレの有無を判定する焦点ズレ判定部と、を備えることを特徴とする。
(もっと読む)
光学式位置検出装置
【課題】測定頻度を高めることに伴って対象物体の位置検出精度を高めることのできる光
学式位置検出装置を提供すること。
【解決手段】光学式位置検出装置10において、検出用光源12が検出光L2を出射した
際に対象物体Obで反射した検出光を光検出器30で検出して対象物体Obの座標を検出
する。検出空間10Rからみたときに、光検出器30の周りで周方向で並ぶ第1検出用光
源12A、第2検出用光源12B、第3検出用光源12Cおよび第4検出用光源12Dは
、光検出器30を中心としたときに不等の角度間隔に配置されている。また、第1検出用
光源12Aと第2検出用光源12Bとを結ぶ線と、第3検出用光源12Cと第4検出用光
源12Dとを結ぶ線とが非平行で、第1検出用光源12Aと第4検出用光源12Dとを結
ぶ線と、第2検出用光源12Bと第3検出用光源12Cとを結ぶ線とが非平行である。
(もっと読む)
光学式位置検出装置
【課題】検出光の出射空間のサイズを可変にすることのできる光学式位置検出装置を提供
すること。
【解決手段】光学式位置検出装置10Aにおいて、検出用光源部12が検出光L2を出射
した際に対象物体Obで反射した検出光を光検出器30で検出して対象物体Obの座標を
検出する。第1検出用光源部12A〜第4検出用光源部12Dは、第1発光素子12A1
、12B1、12C1、12D1〜第3発光素子12A3、12B3、12C3、12D3を備
えている。対象物体Obの検出空間10Rを広く設定する場合には、点灯する発光素子の
数を増やして出射空間を広げる一方、対象物体Obの検出空間10Rを狭く設定する場合
には、点灯する発光素子の数を減らして出射空間を狭める。
(もっと読む)
位置検出機能付き機器
【課題】比較的簡素な光学式入力装置でありながら位置検出精度が高く、かつ、情報の視
認を妨げることのない位置検出付き機器を提供すること。
【解決手段】位置検出機能付き機器1の光学式位置検出装置10において、検出用光源1
2が検出光L2を出射した際に対象物体Obで反射した検出光を光検出器30で検出して
対象物体Obの座標を検出する。検出用光源12は、視認面構成部材40の視認面41側
に検出光L2を出射するが、かかる検出光L2は赤外光である。このため、検出光が視認
されないので、情報の視認を検出光L2が妨げない。
(もっと読む)
光学式位置検出装置
【課題】測定頻度を高めることに伴って対象物体の位置検出精度を高めることのできる光
学式位置検出装置を提供すること。
【解決手段】光学式位置検出装置10において、検出用光源12が検出光L2を出射した
際に対象物体Obで反射した検出光を光検出器30で検出して対象物体Obの座標を検出
する。検出空間10Rからみたときに、光検出器30の周りで周方向で並ぶ第1検出用光
源12A、第2検出用光源12B、第3検出用光源12Cおよび第4検出用光源12Dは
、光検出器30からの距離が相違している。また、第1検出用光源12Aと第2検出用光
源12Bとを結ぶ線と、第3検出用光源12Cと第4検出用光源12Dとを結ぶ線とが非
平行で、第1検出用光源12Aと第4検出用光源12Dとを結ぶ線と、第2検出用光源1
2Bと第3検出用光源12Cとを結ぶ線とが非平行である。
(もっと読む)
マーカー処理方法、マーカー処理装置、マーカー、マーカーを備える物体、およびマーカー処理プログラム
【課題】撮像された画像から、マーカーの姿勢(位置、回転、傾き)、およびマーカーの大きさに依存しないマーカー処理方法、マーカー処理装置、マーカー、マーカーを備える物体、およびマーカー処理プログラムを提供することを目的としている。
【解決手段】マーカー処理装置100は、画像データ取り込み部101と、二値化部102と、二値化閾値設定部103と、領域ラベリング部104と、領域重心取得部105と、領域重心の多重度取得部106と、マーカー判定部107と、マーカー候補領域リスト記憶部108と、マーカー位置出力部109から構成されている。
(もっと読む)
半導体ウェハの表面検査システム及び表面検査方法
【課題】半導体ウェハ表面に存在するソーマークなどの線状の凹凸について、短時間かつ容易に検査が可能であり、検査に対する振動の影響を低減できる技術を提供する。
【解決手段】半導体ウェハWの表面の全域に光源装置2によって斜め方向から光を照射し、CCDカメラ4で半導体ウェハW全体を撮影する。これにより、半導体ウェハWの各ポイントからの前記照射光の反射光または散乱光の強度を検出する。取得された光の2次元的な強度分布に基づいて、半導体ウェハWの表面に生成されたソーマークなどの凹凸を検出し、またはその大きさを測定する。
(もっと読む)
環境に配置された物体の表面上の放物線状湾曲の点を求めるための方法およびシステム
【課題】カメラ−物体対と環境との間の相対運動のもとでカメラによって取得された物体の画像のセットから鏡面物体の表面上の放物線状湾曲の点を求めるためのシステムおよび方法を提供する。
【解決手段】方法は、画像のセットにおける各画像の各ピクセルにおける画像勾配の方向を求める。ここで、物体の表面上の同一点に対応する異なる画像からのピクセルが、対応するピクセルを形成する。画像勾配の実質的に一定の方向を有する対応するピクセルは、放物線状湾曲の点を表すピクセルとして選択される。
(もっと読む)
鋼板表面の酸化膜厚計測方法および装置
【課題】鋼板表面に生成された鉄系酸化物の膜厚を、鋼板から遠く離れた加熱炉外からオンラインで連続的に精度良く測定することができる鋼板表面の酸化膜厚計測方法及び装置を提案することを課題とする。
【解決手段】鋼板の表面に赤外光を間欠的に照射し、赤外光の照射時には鋼板表面から放射される自発光放射エネルギーと照射した赤外光の鋼板表面からの反射光エネルギーの合計されたエネルギーを、赤外光の照射が遮断される時には鋼板からの自発光放射エネルギーのみを、2つの異なる赤外波長帯域にてそれぞれ検出し、赤外光の間欠照射によって検出される検出値のうち赤外光の照射時の検出値から遮断される時の検出値を減じることにより反射光エネルギーを算出し、算出された反射光エネルギーについて2つの異なる赤外波長帯域間の比を前記加熱炉の入側及び出側でそれぞれ演算し、それらの比を演算する。
(もっと読む)
視覚検査システム
【課題】ワークに対してカメラを任意の位置、姿勢に移動させながら視覚検査を行うことができるものであって、設備全体の小型化を図る。
【解決手段】支持台2上にYZロボット3を設け、その前方に回転テーブル4を設ける。YZロボット3は、Z軸移動機構5、Y軸移動機構6、前後(Y軸)方向に延びる光軸Oを有しワークWを撮影するカメラ7を備え、カメラ7を前後(Y軸)及び上下(Z軸)方向に自在に移動させる。回転テーブル4は、ワークWを載置し、垂直方向に延びる回転軸θ周りに自在に回転させる。カメラ7の先端に180度以上の画角を有する超広角レンズ10を設ける。
(もっと読む)
欠陥検査装置
【課題】表面に透明薄膜が形成された基板等の試料において、透明薄膜の上面の微小な異物、キズ等の欠陥を高感度且つ高速に検査することができる欠陥検査装置を提供する。
【解決手段】本発明の欠陥検査装置によると、照明光学系は、試料の表面の法線に対して所定の入射角を有する検査用照明光を試料表面に照射し、試料表面にスリット状のビームスポットを生成する。試料の表面に対して所定の傾斜角にて傾斜した光軸を有する斜方検出系と試料の表面の法線に沿った光軸を有する上方検出系によって、ビームスポットからの光を検出する。斜方検出系と上方検出系の出力によって、試料の表面の透明薄膜上の欠陥を検出する。検査用照明光の入射角は、試料の表面の透明薄膜下面にて反射した反射光が透明薄膜上面にて全反射するときの入射角より僅かに小さい角度である。
(もっと読む)
舗装路面のクラックの抽出と損傷レベルの評価方法
【課題】舗装道路のひび割れ検出は、現場を撮影した画像を検査所に持ち帰り、分析機器を使って分析・評価しているが、全長が何百キロメータ以上にも及ぶ道路のひび割れ検出には処理画像の量が膨大で人的作業に適さず、評価も技術者の経験による主観的判断によっているため、客観的かつ定量的に行うことが不可能である。
【解決手段】本発明に係る舗装路面のクラックの抽出と損傷レベルの評価方法は、遺伝的プログラミングによる並列型画像フィルタ自動生成システムにサイズ依存型交叉を導入して複数の実舗装画像からクラック(1)の抽出が困難と思われる箇所をフィルタ構築の訓練データに選定採用することで様々なタイプの画像からクラックの抽出用画像フィルタ(4)を自動的に構築する。そして、評価対象舗装領域の画像全体を格子状に分割した個々のブロック(6)に該抽出用画像フィルタ(4)を適用して評価する。
(もっと読む)
ハードディスクメディアの検査装置及び検査方法
【課題】本発明は、分光反射強度に含まれる迷光成分を低減し、パターンドディスク表面のパターン形状を精度よくまたはパターン欠陥を確実に検出できるハードディスクメディアの検査装置または検査方法を提供することである。
【解決手段】本発明は、パターンが形成されたハードディスクメディアの表面に複数の波長を含む光を照射し、波長毎に検出される反射光の強度を前記ハードディスクメディアからの反射光を検出する検出器に発生する迷光成分の強度で補正し、前記補正された反射光の強度から分光反射率を算出することを第1の特徴とする。前記補正は、前記ハードディスクメディアからの反射光の強度を前記反射光の短波長領域をカットした状態とカットしない状態で波長毎に検出し、両者の前記反射光の強度との差に基づいて行なうことを第2の特徴とする
(もっと読む)
誘導飛翔体装置
【課題】誘導飛翔体において、複数の赤外線センサーにより、目標に向け誘導するセンサーシステムを提供する。
【解決手段】誘導飛翔体装置の側面に複数の分散させたウインドウ1を配置して、そのウインドウ1を開口として視野の一部を重なるように複数のセンサ部2を配置し、視野の重なる領域で別々のセンサ部2が探知した目標が同一か否かを判定する同定処理部9を有することで、異なるセンサ部2の視野の間で移動する同一の目標を追尾することができる。
(もっと読む)
141 - 160 / 553
[ Back to top ]