
Fターム[2F065QQ26]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 信号の比較、減算 (4,276) | 比 (553)
Fターム[2F065QQ26]に分類される特許
61 - 80 / 553
ラベル作成用処理プログラム及びラベル作成処理方法
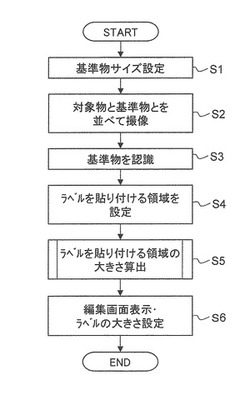
【課題】ラベルのサイズを自動的に決定することで操作負担を低減し、操作者の利便性を向上する。
【解決手段】操作端末10の制御回路102は、対象物Fの実寸法Bを決定する基準となる基準物Kの実寸法Aを取得し、タッチパネル112に表示される基準物Kの表示寸法A′と貼り付け領域Zの表示寸法B′との寸法比A′/B′を取得し、取得された基準物Kの実寸法Aと寸法比A′/B′とを用いて、貼り付け領域Zの実寸法Bを算出し、算出された貼り付け領域Zの実寸法Bに基づき、対象物Fに貼り付けるラベルLのサイズを設定するための、ラベル作成用処理プログラムを実行する。
(もっと読む)
計算装置、計算方法及び計算プログラム

【課題】手間を掛けずに精度高く、カメラの設置高や設置角度を計算可能な計算技術を提供することを目的とする。
【解決手段】計算装置は、第1取得部と、第2取得部と、計算部と、を備える。第1取得部は、各々異なる位置にあるときの同一の対象物が同一のカメラにより、各々撮影された複数の画像を取得する。第2取得部は、対象物の高さを取得する。計算部は、複数の画像及び高さを用いて、カメラの設置角度及び設置高を計算する。
(もっと読む)
光学式位置検出装置
【課題】検出用発光素子と受光素子との位置関係を適正化することにより、対象物体の位置を広い領域にわたって検出することのできる光学式位置検出装置を提供する。
【解決手段】光学式位置検出装置10において、X軸方向で離間する第1発光受光部15Aと第2発光受光部15Bとを順次排他的に駆動した際の駆動結果と、Y軸方向で離間する第3発光受光部15Cと第4発光受光部15Dとを順次駆動した際の駆動結果とに基づいて、対象物体ObのX座標およびY座標を検出する。複数の発光受光部15のいずれにおいても、検出用発光素子12と受光素子30とが隣り合う位置に配置され、対象物体Obで反射して第1受光素子30Aに到達する光は、対象物体Obにおいて第1検出用発光素子12Aおよび第1受光素子30Aが位置する側に向けて反射した光である。このため、第1受光素子30Aの受光強度は、対象物体Obの位置によって単調に変化する。
(もっと読む)
検査装置および検査方法
【課題】過度の欠陥検出を抑制することにより、不必要な欠陥修正を低減することのできる検査装置および検査方法を提供する。
【解決手段】センサ106からマスク101の光学画像を取得するし、光学画像におけるパターンの寸法と、判定の基準となる基準画像におけるパターンの寸法とを測定し、これらから第1の誤差を求める。マスク101上の光学画像と基準画像について各転写像を推定し、これらの転写像におけるパターンの寸法を測定して第2の誤差を求める。各転写像を比較し、差異が閾値を超えた場合に欠陥と判定する。欠陥と判定された箇所における第2の誤差を第1の誤差で補正する。
(もっと読む)
光学式位置検出装置
【課題】少ない部品で対象物体の位置を高い分解能で検出することのでき、さらには、少ない部品で対象物体の三次元座標を高い分解能で検出することのできる光学式位置検出装置を提供する。
【解決手段】光学式位置検出装置10では、導光部材40、第1検出用光源121および第2検出用光源122を備えた線状光源ユニット13が複数並列配置されており、点灯した線状光源ユニット13が切り換わった際の光検出部30での受光結果によりY軸方向(第2方向)における対象物体Obの位置を検出する。また、第1検出用光源121と第2検出用光源122とが順次点灯した際の光強度分布を利用してX軸方向における対象物体Obの位置を検出する。さらに、第1検出用光源121および第2検出用光源122が同時点灯した際の光強度分布を利用してZ軸方向における対象物体Obの位置を検出する。
(もっと読む)
画像測定装置、オートフォーカス制御方法及びオートフォーカス制御プログラム
【課題】高精度且つ高速なコントラスト式のオートフォーカスを実現する。
【解決手段】画像測定装置は、ワークを撮像してその画像情報を転送するカメラと、カメラの合焦位置を制御してこの合焦位置をZ軸方向の位置情報として出力する位置制御部と、画像情報及び位置情報に基づいてワークの画像測定を行う画像測定機とを備える。位置制御部は、カメラによるワークの撮像期間における所定のタイミングで、カメラ及び位置制御部のいずれか一方から他方に出力されるトリガ信号に基づき位置情報を取得保持し、画像測定機は、カメラから転送された画像情報及び位置制御部から出力された位置情報に基づき画像情報のZ軸方向の位置情報を算出し、算出された位置情報を用いてオートフォーカス制御を行う。
(もっと読む)
画像測定装置、オートフォーカス制御方法及びオートフォーカス制御プログラム
【課題】安価に測定誤差を校正し高精度且つ高速なコントラスト式のオートフォーカスを実現する。
【解決手段】画像測定装置は、ワークを撮像してその画像情報を転送するカメラと、カメラの合焦位置を制御してこれをZ軸方向の位置情報として出力する位置制御部と、画像及び位置情報に基づいてワークの画像測定を行う画像測定機とを備える。位置制御部は、カメラの所定の撮像タイミングで位置情報を取得保持し、画像測定機は、合焦軸方向に沿って移動速度及び移動方向の少なくとも一つが異なるように複数回のAFサーチを行い、各AFサーチのカメラからの画像情報及び位置制御部からの位置情報に基づき撮像タイミングと位置情報の取得タイミングとのずれ量を求め、このずれ量に基づいてAFサーチで求められた合焦位置を補正する。
(もっと読む)
荷電粒子ビーム描画装置
【課題】試料の表面形状を正確に測定して高い精度で描画することのできる荷電粒子ビーム描画装置を提供する。
【解決手段】高さ測定部40において、光源41から照射される光Liをマスク2上で投光レンズ42によって収束させた後、マスク2上で反射した光Lrを受光レンズ43を介して受光素子44に入射させる。受光素子44で光の位置が検出されると、信号処理部60を経て、高さデータ処理部70で高さデータHrが作成される。光Lrの光量が閾値以上であれば、高さデータHrを偏向制御部30へ送る。一方、光Lrの光量が閾値より小さい場合には、描画前に取得した高さデータマップHmから、対応する座標の高さデータを偏向制御部30へ送る。偏向制御部30は、高さデータ処理部70から送られた高さデータに基づいて、電子ビーム光学系10の調整を行う。
(もっと読む)
測定装置、測定方法、およびプログラム
【課題】対象物に接触または近接させた複数の測定用端子の位置を撮影画像に基づいて取得する技術において、一部の測定用端子の位置を取得できなかった場合に、再度の撮影を行うことなくその位置を取得する。
【解決手段】プローブソケット11,12は、被験者の頭部25に複数が装着される。プローブソケットを被験者に装着した状態を複数の方向から撮影し、その撮影画像からプローブソケットの位置を検出する。この際、ある特定の撮影画像からの検出が上手くゆかず、一部のプローブソケット位置が特定できない場合、他の撮影画像の中に写っている当該プローブソケットの撮影画像を利用して再検出を行う。これにより、検出ミスがあっても再度の撮影を行わずに済む。
(もっと読む)
3次元測定装置
【課題】測定対象物に投影される縞の像の歪みを防止することができ、また、影の問題や、ハレーションの問題等を解消することができる3次元測定装置を提供すること。
【解決手段】3次元測定装置100は、投影部20と、撮像部30とを含む。投影部20は、基板10に向けて垂線を下ろしたときの基板の表面(投影面)との交点3の周囲の領域である投影可能領域2に縞を投影可能とされる。撮像部30は、投影可能領域2内に複数の撮像領域1を有する。投影可能領域2は、広範な領域とされているので、投影可能領域2内には複数の撮像領域1を設けることができる。撮像可能領域2内における撮像領域1の位置等は、影あるいはハレーションの影響の排除等を目的として設定される。
(もっと読む)
三次元形状計測装置及び三次元形状計測方法
【課題】照明光を機械的に走査せずに測定対象物の表面形状を精度良く求める。
【解決手段】点灯制御部31は、光源LEを順次に1個ずつ点灯させる。撮像制御部32は、各光源LEが点灯される毎に、測定対象物の画像データを撮像部20に取得させる。画像データ特定部33は、画像データを構成する各画素について、輝度値が最大となる画像データを、撮像部20により取得された全画像データ中から特定する。傾き算出部34は、画像データ特定部33により特定された各画像データにつき、各画像データを取得する際に点灯された光源LEの位置を特定し、特定した各光源LEの位置を基に、各画素に対応する測定対象物の各測定位置の傾きを算出する。表面形状算出部35は、傾き算出部34により算出された各測定位置APの傾きを基に、各測定位置APの高さを算出し、測定対象物OBの表面形状を算出する。
(もっと読む)
鉄道車両アタック角測定装置および方法
【課題】軌間外の建築限界を支障しない箇所に1つのセンサを設置するだけで車輪のレールに対するアタック角を測定することができ、複数のセンサを用いることや、高い精度でのゼロ点調整が不要な、鉄道車両アタック角測定装置および方法を提供する。
【解決手段】レールを走行する鉄道車両の車輪Wが通過する位置が測定範囲となるように設置され、測定点を通過する前記車輪Wまでの距離を連続的に測定するセンサ部12と、前記センサ部12による測定結果を受信して解析する処理部14と、を有し、前記処理部14は、前記センサ部12の測定結果から、前記車両の走行速度と、所定時間における車輪Wまでの距離の変化量を算出し、前記走行速度に前記所定時間を乗じた値と、前記所定時間における車輪Wまでの距離の変化量とから、その車輪の前記レールに対するアタック角を算出する。
(もっと読む)
接触面積測定装置および接触面積測定方法
【課題】新規な接触面積測定装置を提供することを目的とする。
【解決手段】接触面積測定装置は、試料7に接する光透過性基板6と、前記試料7とは反対側から、前記光透過性基板6に光を照射する照射手段と、前記試料7からの反射光と前記光透過性基板6からの反射光とから生じる干渉画像を取得する干渉画像取得手段12と、前記干渉画像の輝度値情報を補正処理し、得られた補正輝度値情報から輝度値ヒストグラムを作成する輝度値ヒストグラム作成手段14と、前記輝度値ヒストグラムから接触面積を算出する接触面積演算手段15を有し、前記補正処理は、割り算演算を有する式により、補正画像輝度を算出する。ここで、補正画像輝度は、式(補正画像輝度=(対象画像輝度/参照画像輝度)×定数)により算出することが好ましい。また、参照画像輝度は、荷重ゼロ時の元画像に対し、ガウスぼかしフイルター処理して求めることが好ましい。
(もっと読む)
三次元形状測定装置
【課題】多乱光の影響による三次元形状の測定の誤差を抑制する。
【解決手段】三次元形状測定装置は、投影部と、調整部と、検出部と、制御部とを備える。投影部は、測定対象物に対してパターン光を照射する。調整部は、パターン光の照射強度を調整する。検出部は、パターン光の照射された前記測定対象物の表面の明るさを検出する。制御部は、パターン光を照射しない非照射状態で検出される測定対象物の表面の明るさに基づいて調整部による照射強度の調整を制御する。
(もっと読む)
計測装置
【課題】簡単な構成で、試料を加熱しつつ正確に計測することが可能な計測装置を提供する。
【解決手段】計測装置は、試料Aを保持する位置または試料Aに対向する位置に配置され、透明基板121と透明基板121の表面に設けられた透明導電膜122を有する透明部材12と、試料Aを撮影する光検出部22と、透明部材12の透明導電膜122に印加する電圧を制御することにより、透明部材12の温度を制御する熱制御部42とを備える。
(もっと読む)
光位相測定装置、光位相測定方法およびプログラム
【課題】参照光の位相設定精度に限界がある場合でも、測定対象物による位相シフト量を用いた計測する光位相測定装置を提供する。
【解決手段】コヒーレント光源81、光源よりの光波を2分岐する光分岐手段82、光波のうちの参照光波89を周波数ωmで位相変調する位相変調手段83a、分岐された後に被測定対象物85を透過又は反射した信号光波と位相変調された参照光波89とを合成する光合成手段97と、合成された干渉光の強度を測定する光強度測定手段88を有する光干渉計を備えた光位相測定装置で、干渉光の強度を一定の時間に亘って取得し、取得した時系列の強度信号をフーリエ変換し、位相変調の周波数ωmの整数倍の周波数成分のうち少なくとも2つの成分の光強度を演算して、位相変調手段の変調指数mを同定して、該変調指数mに基づいて前記被測定対象物85による信号光波の位相変化量φを算出する演算手段95を備えた光位相測定装置。
(もっと読む)
計測方法及び計測装置
【課題】非球面を含む被検面の計測に有利な技術を提供する。
【解決手段】非球面を含む被検面を照明する第1の光学系と前記被検面からの光を検出面を有する検出部に導く第2の光学系と、既知の非球面形状を有する基準面を前記検出面と共役な面に配置し、前記基準面からの光が前記検出面に入射する角度を前記検出面上の複数の座標のそれぞれについて前記検出部で検出する第1のステップと、前記被検面を前記共役な面に配置し、前記被検面からの光が前記検出面に入射する角度を前記検出面上の複数の座標のそれぞれについて前記検出部で検出する第2のステップと、前記第1のステップで検出された角度と前記第2のステップで検出された角度との角度差により、前記被検面の面形状と前記既知の非球面形状との差分形状を求め、前記既知の非球面形状に前記差分形状を加えることで前記被検面の面形状を算出する計測方法を提供する。
(もっと読む)
乗員検知装置
【課題】大人と子供とを精度良く判別する。
【解決手段】乗員検知装置10は、単眼距離画像センサ11から出力される距離画像に基づき、乗員領域の体積を推定し、該体積が所定体積閾値以上であるか否かを判定する体積判定部56と、車両上下方向の所定位置よりも下方側に車室内の乗員の膝部が存在するか否かを判定する膝部判定部57と、体積判定部56により乗員領域の体積が所定体積閾値以上であると判定された場合であって、膝部判定部57により所定位置よりも下方側に膝部が存在すると判定された場合には乗員は大人であると判定し、膝部判定部57により車両上下方向の所定位置よりも下方側に膝部が存在しないと判定された場合には乗員は子供であると判定する乗員判定部58とを備える。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】対象物体以外の物体で反射した検出光の影響を受けずに対象物体の位置を検出することができる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10においては、複数の検出用光源12を順次点灯させると、第1受光部31は、対象物体Obで反射した検出光L3を受光する。その際、第1受光部31には、対象物体Ob以外の物体Sbで反射した検出光L4が入射する場合があるが、光学式位置検出装置10には、検出対象空間10Rに入射しない補償光L5を出射する補償用光源部81と、検出光L2、L3、L4を受光せずに補償光L5を受光する第2受光部32とが設けられており、位置検出部50は、第1受光部31での受光強度と第2受光部32での受光強度との差に基づいて対象物体Obの位置を検出する。
(もっと読む)
光学式変位計
【課題】対象物の変位を正確に検出することが可能な光学式変位計を提供する。
【解決手段】投光部1は、偏光方向が互いに異なる第1および第2の光を選択的にワークWに照射する。ワークWからの反射光が、受光レンズ22を通して受光素子21に入射する。波形生成部は、受光素子21による第1および第2の光の受光量分布を示す第1および第2波形データを生成する。波形処理部7は、第1および第2の波形データの間で互いに対応するピークの比を算出し、算出された比に基づいて、第1および第2の波形データの各々から1つのピークを選択し、そのピークの位置を検出する。
(もっと読む)
61 - 80 / 553
[ Back to top ]