
Fターム[2F065QQ26]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | 信号の比較、減算 (4,276) | 比 (553)
Fターム[2F065QQ26]に分類される特許
21 - 40 / 553
計測装置および計測方法
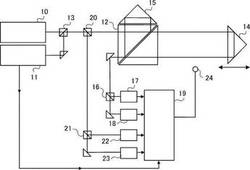
【課題】高精度に被検面と参照面の間の絶対距離を計測可能な計測装置および計測方法を提供する。
【解決手段】第1の基準波長λ1と第2の基準波長λ2との間で波長走査が可能な光源11と、第3の基準波長λ3の光を射出する光源10を有する光波干渉計測装置は、各波長に対応した干渉光の信号に基づいて被検面と参照面との間の光路長に相当する位相の誤差を補正し、誤差が補正された位相に基づいて被検面と参照面の間の絶対距離を算出する処理部19を有する。
(もっと読む)
機器制御装置

【課題】複数人で構成されるグループが移動する経路上に設けられた1個以上の機器を到着に先立って制御することができる機器制御装置を提供する。
【解決手段】注視方向検出部2は、グループ内の各人が注視している方向を検出する。方向関係特定部3は、各人が注視している向きと照明機器が存在する方向との関係を特定する。グループ希望方向推定部4は、グループ内の全員について特定した関係に基づいて、グループ全体として照明機器が存在する方向への移動の希望を推定する。制御部5は、グループ希望方向推定部4による推定結果に基づいて、照明機器10_1〜10_Nを制御する。
(もっと読む)
表面形状計測装置
【課題】散乱光の空間分布がマイクロラフネスの差異に応じて、前方/後方/側方と色々な方向に変化することについて配慮し、特にエピタキシャル成長ウェハに出現するステップ・テラス構造は散乱光分布に異方性が生じることに配慮した表面形状計測装置を提供する。
【解決手段】試料1表面に光を照明し、光軸の方向が互いに異なる複数の検出光学系51,52により散乱光の空間分布を検出し、試料1表面の空間周波数スペクトルを算出する。
(もっと読む)
立体感提示装置および方法ならびにぼけ画像生成処理装置,方法およびプログラム
【課題】片眼でも立体感を得ることができる立体感提示装置を提供する。
【解決手段】間隔をおいて配置された2台のカメラから出力されるステレオ画像データを構成する左右の画像データに基づいて距離画像データを生成する距離画像生成手段53と,生成された距離画像データを用いて,上記の左または右の画像データに,距離に応じた焦点ぼけを与えてぼけ画像データを生成するぼけ画像生成手段55を備える。生成されたぼけ画像データに基づいて対象の焦点ぼけ画像を表示装置に表示する。
(もっと読む)
車両運転支援装置、道路の路肩を検出する方法および該方法に基づく車両運転支援方法
【課題】本発明は、実際の道路環境において、反射光(楕円偏光)の楕円軸が車両の車軸方向あるいは高さ方向に対して傾いている場合であっても、正確に路肩を検出することができる新規な車両運転支援装置を提供することを目的とする。
【解決手段】偏光撮像手段の画素毎に直交する2つの偏光方向をもつ偏光素子を設け、該偏光素子の偏光検出軸を所定の角度範囲で変更させながら、2つの偏光方向に対応する光強度の比を監視し、当該光強度比が最初の極値に達したときの光強度に基づいて偏光状態特徴量を算出する。この偏光状態特徴量が所定の閾値を超える領域を路肩として検出し、その位置情報に基づいて、操舵制御手段、走行速度制御手段、警告手段等を制御することによって車両の運転支援を行う。
(もっと読む)
形状計測装置及び形状計測方法
【課題】物体の形状計測を非接触且つ高精度で行い得る形状計測装置及び形状計測方法を提供する。
【解決手段】 本発明の形状計測装置1は、少なくとも5つの光源を等間隔に直線状に配列した光源アレイ11、1次元格子の格子面を有する格子プレート12、1次元格子が投影される計測対象物体21を撮影するカメラ13及び制御ユニット50を備える。制御ユニット50は、少なくとも5つの光源のうち隣接配置の少なくとも4つの光源からなる光源組を2組設定し、この2組の光源組における各光源を順次点灯するよう光源アレイ11を制御するとともに、それぞれ計測対象物体21に投影される1次元格子を撮影するようカメラ13を制御し、撮影された画像から2組の光源組による計測対象物体21上に投影された1次元格子の位相をそれぞれ算出し、当該2つの位相の差を位相シフト量として予め定めた換算式に基づいて計測対象物体21に関する高さ座標を求める。
(もっと読む)
移動体駆動方法及び移動体駆動システム、パターン形成方法及び装置、露光方法及び装置、デバイス製造方法、並びに計測方法
【課題】計測対象面の凹凸に起因する面位置センサの計測誤差の補正データを作成し、該補正データを用いて計測精度が改善される面位置センサを用いて、移動体を高精度に2次元駆動する。
【解決手段】 X干渉計127、Y干渉計16を用いて位置を監視しながらウエハステージWSTを移動させ、センサ72a〜72dを用いてウエハステージ上面に設けられたYスケール39Y1,39Y2のZ位置を計測する。ここで、例えば、2つの面位置センサ72a,72bの計測結果の差より、Yスケール39Y2のY軸方向の傾きが得られる。Yスケール39Y1,39Y2の全面について傾きを計測することにより、それらの2次元凹凸データが作成される。この凹凸データを用いてセンサの計測結果を補正し、該補正済みの計測結果を用いることにより、高精度にウエハステージを2次元駆動することが可能になる。
(もっと読む)
撮像装置及びこれを備えた物体検出装置並びに偏光フィルタ
【課題】湾曲面からの反射光を適切にカットし又は湾曲面からの反射光を適切に選択して透過させることを課題とする。
【解決手段】湾曲したフロントガラス面に対する相対位置が一定となるように設置され、そのフロントガラス面からの反射光(水平偏光成分S)をカットする鉛直偏光領域を備えた偏光フィルタ層を介して、撮像領域からの光を画像センサ206上の各撮像画素で受光して撮像する撮像装置において、上記鉛直偏光領域は、透過軸方向が異なる複数のフィルタ領域部分から構成されており、各フィルタ領域部分の透過軸方向は、当該フィルタ領域部分へ入射してくるフロントガラス面上からの反射光の最大偏光成分の偏光方向に基づいて設定される。
(もっと読む)
抗菌加工品の抗菌性能の評価方法
【課題】抗菌剤の抗菌性能の評価に要する時間および費用を低減する。抗菌剤の抗菌性能の評価において、細菌培養を行うことなく間接的な方法によって簡易な評価方法を提供する。さまざまな形状の抗菌加工品の各部位の抗菌性能を評価する方法を提供する。
【解決手段】本願発明の抗菌の抗菌性能の評価方法は、抗菌剤の少なくとも一部が表面から露出してなる抗菌加工品の抗菌性能を評価する評価方法であり、抗菌加工品の表面上に設定した関心領域の画像を取得し、関心領域において表面から露出する抗菌剤の露出の程度を表す露出率を画像から求め、予め求めておいた露出率と抗菌加工品の抗菌性能との相関関係に基づいて、画像から求めた露出率に対応する抗菌性能を求め、求めた抗菌性能によって抗菌加工品の抗菌性能を評価する。
(もっと読む)
位置検出装置、位置検出方法及びコンピュータプログラム
【課題】検出対象の位置を精度良く検出する位置検出装置を提供する。
【解決手段】所定の位置で所定の向きに設置された撮像装置によって撮像された第一の画像から、検出対象に含まれる第一特徴点eye_2l及び第二特徴点eye_2rの平面座標の位置を検出し、第一特徴点及び第二特徴点の空間座標の位置を取得し、第一特徴点と第二特徴点との間の平面座標における距離と空間座標における距離との比を算出し、撮像装置によって撮像された第二の画像から、検出対象に含まれる第一特徴点及び第二特徴点の平面座標の位置を検出し、距離比と、第二の画像における第一特徴点及び第二特徴点の平面座標と、に基づいて第一特徴点及び第二特徴点の空間座標の位置を検出する。
(もっと読む)
3次元相対座標計測装置およびその方法
【課題】撮影点におけるカメラの位置および姿勢を事前に把握することなく相対座標を計測することができる3次元相対座標計測装置を提供する。
【解決手段】3次元相対座標計測装置90は、第1の視点より3点の基準点が撮像装置で撮像された第1の取得画像を取得する画像取得部100と、各画素に対する画素視点投影角の情報を保持し、情報を用いて、第1の取得画像に投影される3点の基準点に対応する画素視点投影角である3つの第1の基準視点投影角を取得する視点投影角抽出部120と、3つの第1の基準視点投影角と3点の基準点の相対座標とを用いて、第1の取得画像の撮像面である第1の撮像面と3点の基準点を含む基準平面とのなす第1の傾斜角を算出する傾斜角算出部130aと、第1の傾斜角を用いて、3点の基準点のいずれかと対象点との相対座標を計測する相対座標計測部130dとを備える。
(もっと読む)
測定装置
【課題】スピンドルに取り付けられて高い回転数で回転する極小径丸棒若しくは極小径工具の動的振れを測定可能な極めて実用性に秀れた測定装置の提供。
【解決手段】光源と、光源からの光線を被測定部材へ導くレンズ系と、被測定部材を介して光線を受光する複数のフォトダイオードとを備える光学系を有し、フォトダイオードでの受光量をもとに被測定部材の位置若しくは振れ量を測定する測定装置であって、光学系の光軸方向視において、複数のフォトダイオードにして被測定部材の軸心と交差する辺部が全て直線であり、複数のフォトダイオード間には、被測定部材の軸方向に対して傾斜する少なくとも1つのギャップを設け、このギャップの両端部は被測定部材の外形より外方に位置させ、ギャップを形成するフォトダイオードの辺部以外の被測定部材の軸心と交差する辺部がギャップと平行でないように構成する。
(もっと読む)
3次元計測装置およびその方法
【課題】計測装置が揺動する状況下であっても、計測対象の3次元形状を好適に計測することができる3次元計測装置を提供する。
【解決手段】撮像装置12により撮像された画像データを含む撮像情報を取得する撮像部11と、撮像情報に基づいて計測対象の3次元座標を取得する3次元形状演算処理部23と、撮像装置12の加速度および姿勢角度を含む位置姿勢情報を撮像情報の取得と同期して取得する位置姿勢計測部14と、位置姿勢情報に基づいて計測原点に対する撮像装置12の移動量・方向と姿勢角度の変化量・方向とを演算する位置姿勢補正処理部17と、撮像情報と同期して取得された撮像装置12の移動量および方向と姿勢角度の変化量および方向とに基づいて3次元形状演算処理部23により得られる3次元座標を平行移動および回転して複数の3次元座標を統合し、計測対象の3次元形状を取得する統合演算処理部24とを備えた。
(もっと読む)
画像位置検出装置と画像形成装置
【課題】画像端の位置を正確に検出することのできる画像位置検出装置と、この画像位置検出装置を備えた画像形成装置を提供する。
【解決手段】中間転写ベルト上に形成される補正用パターンのパターン画像の端部の位置を検出する位置検出装置であって、補正用パターンに向けて光を照射する発光部17Dと、このパターン画像の表面で正反射する正反射光を受光する正反射光受光部17Hsと、その表面で拡散反射する拡散反射光を受光する拡散反射光受光部17Hrとを備え、正反射光受光部17Hsの正反射光受光信号値と、拡散反射光受光部17Hrの拡散反射光受光信号値に一定係数を乗じた乗算値とに基づいてパターン画像の端部の位置を求める。
(もっと読む)
光センサ、及び、その製造方法
【課題】光の左右比の検出精度の低下が抑制された光センサ、及び、その製造方法を提供する。
【解決手段】半導体基板(10)に受光素子(20)が形成され、受光素子(20)の形成面(10a)上に、透光膜(30)を介して遮光膜(40)が形成され、遮光膜(40)に透光用の開口部(50)が形成された光センサであって、仮想直線(VL)を介して線対称の関係にある一対の受光素子(21,22)及び一対の開口部(51,52)を有し、形成面(10a)に直交する高さ方向に沿う光を、開口部(51,52)を介して受光素子(21,22)に照射した際に、一対の受光素子(21,22)から出力される出力信号に基づいて、高さ方向に沿う光が開口部(51,52)を介して受光素子(21,22)に入射した際に出力される一対の受光素子(21,22)の出力信号が互いに一致するように、各出力信号を補正する。
(もっと読む)
印刷状態計測結果の表示装置および表示方法
【課題】印刷検査によって取得した印刷状態計測情報を印刷品質向上のために有効活用することができる印刷状態計測結果の表示装置および表示方法を提供することを目的とする。
【解決手段】印刷検査装置M2による印刷検査において基板3のランドに印刷されたペーストの平面形状における面積値の正規の印刷面積に対する比率を示す面積率を複数のランドのそれぞれについて求めた面積率計測データ23aを、表示用データ作成プログラム23bに規定された所定の処理アルゴリズムにしたがってデータ処理して、基板に印刷されたペーストの印刷状態を視覚的に表示するための表示用データを作成し、作成された表示用データを表示フォーマットデータ23cに規定される所定の表示フォーマットにしたがって表示パネル26の表示画面に表示する。
(もっと読む)
測距装置
【課題】単一の車載カメラによる撮像画像を利用する安価なシステム構成で、該車載カメラにより撮像される対象物と自車両と対象物との間の距離を高い信頼性で行なうことができる測距装置を提供する。
【解決手段】撮像画像から抽出された対象物53の撮像画像中でのサイズと標準サイズ値との比率を基に、第1距離推定値D1を決定する。また、自車両1からの距離が対象物53の接地点P53と同じになる静止点Pを撮像画像に投影してなる特徴点を抽出し、少なくともその特徴点の位置に基づいて第2距離推定値D2を決定する。第2距離推定値D2が所定の許容範囲に収まっているか否かを判断し、その判断結果に応じて、第1距離推定値D1と第2距離推定値D2とのうちの一方を対象物53の自車両1からの距離の推定値として確定する。
(もっと読む)
検出装置、検出方法、インプリント装置及びデバイス製造方法
【課題】 異なる2つの物体の回転ずれを計測する際に、従来と比較して計測時間の短い検出装置、検出方法、インプリント装置及びデバイス製造方法を提供すること。
【解決手段】 異なる2つの物体にそれぞれ形成された格子マークが重なることによって生じる干渉縞を用いて、前記2つの物体の相対的な回転ずれ量を求める検出装置において、前記干渉縞を検出する検出器と、該検出器で検出された前記干渉縞の傾きから前記異なる2つの物体の相対的な回転ずれ量を求める演算部と、を有することを特徴とする検出装置。
(もっと読む)
検出装置、露光装置、および、デバイスの製造方法
【課題】被検物(例えば、基板の裏面と表面とに形成されたマーク)の位置を高精度に検出することができる技術を提供する。
【解決手段】被検体の位置を検出する検出装置であって、前記被検体を第1波長帯域及び前記第1波長帯域とは異なる第2波長帯域を含む光で照明する照明系と、前記被検体からの光により前記被検体の像を形成する結像系と、前記被検体の像を撮像する撮像素子と、前記照明系又は前記結像系の光路における前記第1波長帯域の光に対する透過率と前記第2波長帯域の光に対する透過率とを異ならせることで、前記撮像素子で撮像される前記被検体の像を形成する前記第1波長帯域の光の強度と前記撮像素子で撮像される前記被検体の像を形成する前記第2波長帯域の光の強度との強度差を低減する光学部材と、を有することを特徴とする検出装置を提供する。
(もっと読む)
グリーンシートの膜厚測定装置
【課題】誤差を抑制して測定の精度を向上することができるグリーンシートの膜厚測定装置を提供すること。
【解決手段】膜厚測定装置1は、光源51及び光源51から発せられた光を測定領域Aに向けてライン状に出射する投光ロッド52を有するライン光照明5と、測定領域Aを挟んで投光ロッド52と対向するように配置されたラインカメラ6と、を備えている。投光ロッド52のライン状の光の出射範囲(出射口53)は、投光ロッド52の軸線方向に沿った長さが搬送部3により搬送されるグリーンシートGの軸線方向に沿った長さよりも長い。投光ロッド52と測定領域Aとの間には、投光ロッド52から出射された光のうち、測定領域Aに搬送されたグリーンシートGの軸線方向での端の外側を通って、ラインカメラ6に入射する光を遮光する遮光部材7が設けられている。
(もっと読む)
21 - 40 / 553
[ Back to top ]