
Fターム[2F067RR40]の内容
波動性又は粒子性放射線を用いた測長装置 (9,092) | 信号処理、電源関連 (1,540) | 画像処理 (249) | 画像信号の加算、合成 (28)
Fターム[2F067RR40]に分類される特許
1 - 20 / 28
画像処理装置、及び画像処理を行うためのコンピュータープログラム
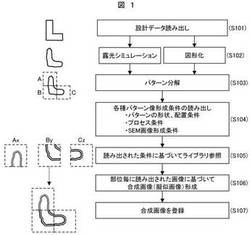
【課題】本発明は、設計データ、或いはシミュレーション画像に基づいて、実画像に近いパターンを形成する画像処理装置の提供を目的とする。
【解決手段】上記目的を達成するために、半導体素子の設計データに基づいて、荷電粒子線装置の動作条件を設定する画像処理部を備えた画像処理装置であって、荷電粒子線装置の装置条件情報,パターンの種類、及びパターンの部位毎のパターン情報の複数の組み合わせを記憶するライブラリにアクセスし、装置条件、及びパターンの種類の選択に基づいて、パターンの部位毎のパターン情報を用いた各部位の合成画像を形成する画像処理装置を提案する。
(もっと読む)
3次元像測定装置及び3次元像測定方法

【課題】半導体デバイスやデバイスシステムの欠陥箇所や不良箇所を、3次元の電流像を用いて特定することができる3次元像測定装置を提供する。
【解決手段】3次元像測定装置100は、走査信号を走査ミラー23に出力する走査回路24と、第2の対物レンズ25を光軸に沿って移動させ、光軸方向における試料200及び第2の対物レンズ25間の相対距離を変化させる光軸方向移動機構26と、制御信号を光軸方向移動機構26に出力する光軸方向移動制御回路27と、試料200に流れる誘起電流を出力する導電性プローブ31と、走査回路24からの走査信号及び導電性プローブ31からの電流値に基づいて試料200の2次元電流像を構築し、光軸方向移動機構26による各相対距離における各2次元電流像を重ね合わせた3次元電流像を構築する演算部43と、を備える。
(もっと読む)
パターン計測方法およびパターン計測装置
【課題】周期的構造パターンに電磁波を照射してパターン形状を計測する場合に、計測時間を増大させることなく、高精度に計測することが可能なパターン計測方法およびパターン計測装置を提供することを目的とする。
【解決手段】複数のパターンが周期的に配列して構成され、かつ、各パターンが部分的に重なる周期的構造パターンに対して、異なる複数の入射方向から電磁波を照射する照射工程と、周期的構造パターンにより散乱される電磁波を検出して、その散乱プロファイルを検出する検出工程と、検出された散乱プロファイルから周期的構造パターンのパターン形状を計測する計測工程と、を含み、照射工程では、異なる複数の入射方向は、周期的構造パターンを構成する各パターンが部分的に重ならない入射方向である。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム
【課題】試料の観察画像の回転を精度よく検出することのできる画像処理技術を提供する。
【解決手段】本発明に係る画像処理装置は、試料の測定箇所を含む広角画像データを介して、測定画像データと基準画像データの間の回転ずれを間接的に補正する。
(もっと読む)
パターン測定方法及びコンピュータプログラム
【課題】本発明は、プロセス変動に依らず、高精度な測定,検査条件の設定を可能とする測定,検査条件設定方法、及びコンピュータプログラムの提供を目的とする。
【解決手段】上記目的を達成するための一態様として、異なる製造条件にて形成された複数のパターンについて、荷電粒子線装置を用いた測定を行い、当該複数のパターンの基準寸法と、当該測定結果との差異、或いはばらつきが相対的に小さくなる測定条件を選択する測定条件設定方法、及びコンピュータプログラムを提案する。複数パターンの基準寸法は、原子間力顕微鏡(Atomic Force Microscope:AFM)によって、上記複数のパターンを測定することによって得るようにしても良いし、半導体パターンの設計データにシミュレーションを施すことによって得られるパターンの断面形状等に基づいて求めるようにしても良い。
(もっと読む)
欠陥検出方法および半導体装置の製造方法
【課題】微細パターン中の微小なオープン欠陥やショート欠陥を検出する手法を提供する。
【解決手段】パターンが形成された基板に電子線を照射し、基板から発生する低エネルギーの二次電子および高エネルギーの反射電子を検出してそれぞれの電子から第1および第2のSEM像を生成する。第2のSEM像から輪郭を抽出してパターンの輪郭データを取得し、該輪郭データを第1のSEM像に適用して検査領域を決定し、該検査領域に対して二値化処理を行うことにより、パターンまたは基板の欠陥を検出する。
(もっと読む)
監視領域における標的の遠隔検査方法
用途:監視領域内の標的の遠隔的な検査
主題:監視領域に、2以上の主要マイクロ波エミッタを用いてマイクロ波を照射する。監視領域から反射された信号を1以上の平行記録チャネルを用いて記録し、さらにこの記録信号をコヒーレント処理し、監視領域内散乱体の(主要エミッタから標的までの距離に基づいて)再構築された形状の最大強度の値を得る。前記コヒーレント処理の結果として得られた情報を、三次元表面に相当するマイクロ波イメージを構築することによって表示する。さらに、マイクロ波エミッタに同期した2以上のビデオカメラを用いて、標的のビデオイメージを獲得し、得られたビデオイメージを変換し、三次元ビデオイメージ及びマイクロ波イメージを一般化座標系へと変換する。これによる技術的成果として、秘密裏の検査における誘電体の存在又は非存在決定の信頼性が向上する。
(もっと読む)
走査荷電粒子顕微鏡装置及びそれを用いたパターン寸法の計測方法
【課題】
半導体パターンの広範囲の撮像領域(EP)を複数の撮像領域(SEP)に分割し,SEPをSEMを用いて撮像した画像群を画像処理により繋ぎ合せるパノラマ画像合成技術において,繋ぎ合せの手掛かりとなるパターンが少なくても全画像が繋がるSEPを決定すること,およびそのようなSEPを決定できなくてもユーザの要求項目をなるべく満たすSEPを決定することである。
【解決手段】
一部のSEP間の重複領域に繋ぎ合せの手掛かりとなるパターンが含まれなくても全画像が繋がるケースがあることに着目し,SEP配置の最適化により前記ケースを抽出することで全画像が繋がるSEPを決定できるケースが増える。また,そのようなSEPを決定できなくても,複数のSEP配置の候補とユーザの要求項目を可視化した情報を表示・SEPを選択させることでユーザの要求項目をなるべく満たすSEPを容易に決定できる。
(もっと読む)
テンプレートマッチング用テンプレート作成方法、及びテンプレート作成装置
【課題】本発明は、プロセス変動等に依らず、高いマッチング精度を安定して確保することが可能なテンプレートマッチング用テンプレート作成方法、及びテンプレート作成装置の提供を目的とする。
【解決手段】上記目的を達成するための一態様として、予め記憶されたテンプレートと、顕微鏡によって取得された画像を比較することによって、所望の位置を特定するテンプレートマッチング用テンプレートの作成方法、及び装置において、テンプレートマッチングによって、特定された個所の画像を複数取得し、当該複数画像を加算平均することによって、新たなテンプレートを作成するテンプレートマッチング用テンプレートの作成方法、及び装置を提案する。
(もっと読む)
パターン寸法算出方法、画像解析方法及び装置
【課題】輪郭線の任意の局所的な位置や特定の部位におけるパターン寸法の算出が容易にでき、また、輪郭線パターンの代表寸法値を精度良く求めることができる画像データ解析を実現する。
【解決手段】検査対象パターンの画像データから得られる輪郭データから、検査対象パターンの対象寸法値を求めるパターン寸法算出方法を開示する。このパターン寸法算出方法では、画像処理部が、対象検査パターンの輪郭データと測長用矩形データとの重なり領域を算出し、重なり領域の面積から対象寸法値を算出する。算出された対象寸法値は画像データ及び輪郭データの少なくとも1つと共に表示部に表示されるようにしても良い。
(もっと読む)
試料像形成方法及び荷電粒子線装置
【課題】本発明の目的は、荷電粒子線照射による帯電の影響を回避しつつ、視野ずれの抑制を実現するのに好適な試料像形成方法,荷電粒子線装置の提供にある。
【解決手段】上記目的を達成するために本発明では、試料上に荷電粒子線を走査し、試料から放出された二次信号に基づいて画像を形成する試料像形成方法において、複数回の走査で得られる複数の画像を合成して合成画像を複数形成し、当該複数の合成画像間の位置ずれを補正して画像を合成し、更なる合成画像を形成することを特徴とする試料像形成方法、及びこの方法を実現するための荷電粒子線装置を提供する。
(もっと読む)
走査荷電粒子顕微鏡を用いたパノラマ画像合成方法およびその装置
【課題】微細な半導体パターンに対する広視野な撮像領域(EP)において、コンタミネーション、画像の撮像ずれや歪みに対してロバストなパノラマ画像合成を実現できるようにした走査荷電粒子顕微鏡を用いたパノラマ画像合成技術を提供することにある。
【解決手段】走査荷電粒子顕微鏡を用いた広視野な撮像領域(EP)におけるパノラマ画像合成技術において、各調整ポイントの配置並びに各局所撮像領域(及び各調整ポイントの撮像順からなる撮像シーケンスを最適化して撮像レシピとして作成することを特徴とする。
(もっと読む)
欠陥レビュー方法およびその装置
【課題】
試料上の欠陥を,画像取得手段を用いて短時間に多数の欠陥観察を行う方法において,第1の倍率で撮像した画像から誤検出なく欠陥位置を特定し,第2の倍率での撮像を可能とする。
【解決手段】
試料上の欠陥を観察する方法において,画像取得手段を用いて第1の倍率で前記欠陥を含む欠陥画像を撮像し,欠陥画像から欠陥を含まない参照画像を合成し,取得した欠陥画像と合成した参照画像とを比較して欠陥候補を検出し,該欠陥候補を欠陥と正常部に識別する処理を行い,欠陥と識別された部位のみを第2の倍率で撮像するように装置を構成した。
(もっと読む)
パターン寸法計測方法
【課題】
電子線シミュレーションを利用した,SEM画像によるパターン計測においては,シミュレーションの精度が非常に重要となる。シミュレーション画像と実画像のマッチングを行うためには,計測対象形状や材料を適切にモデル化し,シミュレーション画像に反映する必要がある。
【解決手段】
本発明では,SEM画像やAFMなど他の計測装置により得られた情報に基づいて,シミュレーションと実画像のマッチング計測の精度に与える影響が大きな形状や寸法を適切に設定したシミュレーション画像を用いることにより,高精度なパターン計測を実現するようにした。
(もっと読む)
線幅や欠陥の検査方法及び検査装置
【課題】SEM画質のよしあしをリアルタイムで判断することができる検査方法及び検査装置を提供する。
【解決手段】荷電粒子ビーム装置により撮像された複数枚のスキャン画像を積算して、1枚のSEM画像を構成し、電子線を用いて、線幅や欠陥を検査する方法及び装置において、スキャン画像毎に設計データとのマッチングを行い、マッチングの結果として、Shift_x,Shift_yを算出し、スキャン画像毎のShift_xの差分δx,Shift_yの差分δxを算出し、上記差分δx又はδyが閾値を超える場合に、SEM画像の取得のリトライ処理を演算手段によって実行する。
(もっと読む)
面積測定方法および面積測定プログラム
【目的】本発明は、面積測定方法および面積測定プログラムに関し、走査型電子顕微鏡を用いて測定対象の任意形状の図形の全方位のエッジ位置をラインプロファイルでそれぞれ検出して当該図形の各エッジ位置を正確に決定してその面積を極めて高精度に測定する目的とする。
【構成】電子線ビームを測定対象の任意形状の図形に面走査してパターン画像を取得するステップと、パターン画像の輪郭線を抽出するステップと、輪郭線の所定各点において、直交する直交角度θを算出するステップと、算出した直交角度θの方向に、細く絞った電子線ビームでライン走査してラインプロファイルを生成するステップと、ラインプロファイルからエッジの位置を検出し、エッジの位置を図形の輪郭線の位置と決定するステップと、生成した図形の輪郭線で囲まれた内部の面積を算出するステップとを有する。
(もっと読む)
試料の凹凸判定方法、及び荷電粒子線装置
【課題】
本発明の目的は、特に試料上に形成されたライン&スペースパターンの凹凸判定に好適な判定方法、及び装置を提供することにある。
【解決手段】
荷電粒子線を当該荷電粒子線の光軸に対し斜めになるように荷電粒子線を傾斜、或いは、試料ステージを傾斜して、試料上に走査し、検出信号の荷電粒子線の線走査方向への広がりを計測し、荷電粒子線を光軸に沿って走査したときの広がりと比較し、広がりの増減に基づいて前記走査個所の凹凸状態を判定する。
(もっと読む)
類似度分布を利用したテンプレートマッチング方法を用いた検査装置
【課題】探索画像中にテンプレートと類似したパターンが存在する場合でも正確なマッチング位置を出力する、探索画像においてテンプレートマッチングを行う検査装置を提供する。
【解決手段】テンプレート選択画像からテンプレートを切出すテンプレート切出し手段と、前記テンプレート選択画像における前記テンプレートとの類似度の分布である周辺類似度分布情報を算出する周辺類似度算出手段と、前記探索画像における前記テンプレートとの類似度の分布である探索画像類似度分布情報を算出する探索画像類似度算出部と、前記周辺類似度分布と前記探索画像類似度分布情報との間の類似度分布間類似度情報を算出する類似度分布間類似度算出手段と、前記類似度分布間類似度に基づいてマッチング位置を決定するマッチング位置決定部とを備える。
(もっと読む)
基板の検査装置、基板の検査方法、および、当該検査装置としてコンピュータを機能させるためのプログラム
【課題】部品が両面に実装された基板を検査するための検査装置を提供する。
【解決手段】基板の検査装置が実行する処理は、片面のみに電子部品が実装された基板の第1の光学画像とX線透過画像との各位置確認マークを一致させて、電子部品の基準画像を生成するステップ(S820)と、両面に電子部品が実装された基板の第2の光学画像と第2のX線透過画像との入力を受けるステップ(S830)と、第1の光学画像と第2の光学画像とを比較して位置ずれ量を算出するステップ(S840)と、位置ずれ量を用いて第1の光学画像を補正して第3のX線透過画像を作成するステップ(S850)と、第2のX線透過画像から第3のX線透過画像を差し引いて第4のX線透過画像を導出するステップ(S860)と、第4のX線透過画像に基づいてはんだ付け部の合否を判定するステップ(S870)とを含む。
(もっと読む)
3次元形状測定方法および3次元形状測定装置
【課題】製品の3次元的内外面形状を測定し、測定したデータから設計、製造に必要なCADデータを作成し、製品を再現化する3次元形状測定方法および3次元形状測定装置を提供する。
【解決手段】本発明に係る3次元形状測定方法は、対象物の表面形状および内部形状のそれぞれを撮像し(St−1、St−2)、撮像した内部形状を点群データに変換し、変換した点群データを基準マーカを基点に重ね合わせて合成する内部形状合成工程(St−3)と、撮像した表面形状を点群データに変換し、変換した点群データを基準マーカを基点に重ね合わせて合成する表面形状合成工程(St−4)と、前記内部形状合成工程(St−3)で作成した内部形状合成点群データと前記表面形状合成工程(St−4)で作成した表面形状合成点群データとを合成して一体化する内部表面データ合成工程(St−5)と、この内部表面データ合成工程(St−5)で作成したデータをCADデータに変換する3次元形状変換工程(St−6)とを備える。
(もっと読む)
1 - 20 / 28
[ Back to top ]