
Fターム[2F069AA54]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 形状パラメーター (256) | 平坦度;平面度 (41)
Fターム[2F069AA54]に分類される特許
1 - 20 / 41
長尺体の直線度を測定する測定方法、携帯型測定用キット
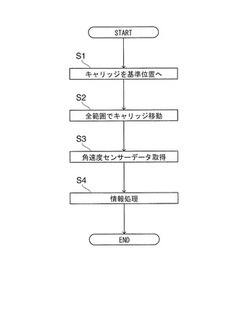
【課題】長尺体の直線度を容易に測定することを考慮した方法を提供すること。
【解決手段】長尺体の直線度を測定する測定方法は、角速度センサーが取り付けられた移動体を、長尺体にガイドされながら移動させる移動工程(S2)と、前記移動体が移動した際の前記角速度センサーの姿勢の変化の情報を前記角速度センサーが取得する取得工程(S3)と、前記角速度センサーの姿勢の変化の情報と前記長尺体における移動中の前記角速度センサーの位置との関係を、情報処理部が関連づけして情報処理する情報処理工程(S4)と、を具備することを特徴とする。
(もっと読む)
平坦度測定装置及び平坦度測定方法

【課題】コンベアベルトの振動の影響を補正できる平坦度測定装置及び平坦度測定方法を提供する。
【解決手段】コンベアベルト34と、前記コンベアベルト34を回転することにより駆動するロールと、前記コンベアベルト34の振動を検出するための第1のセンサ38と、シート32の先端の高さ位置を測定するための第2のセンサ40と、前記第1のセンサ38からの信号と、前記第2のセンサ40からの信号と、を受信して解析するための制御部と、を備え、前記制御部は、前記コンベアベルト34の接続部が前記ロール上に無いと判断したときは、前記第2のセンサ40からの信号に基づいて前記シートの平坦度を算出する際、前記第1のセンサ38からの信号に基づいて前記コンベアベルト34の振動による影響を補正した平坦度を算出し、前記コンベアベルト34の接続部が前記ロール上にあると判断したときは、前記シート32の平坦度を算出しない平坦度測定装置。
(もっと読む)
ウエハ平坦度測定法
【課題】ウエハの平坦度検査を高精度かつスループットの高い方法で実現する。
【解決手段】回転運動および直線運動機構の運動誤差を補正することの可能な3点法を、ウエハ101と検出器9の相対的な回転運動によるウエハ外周の形状測定と、ウエハ101と検出器9の相対的な直線運動によるウエハ直径方向の形状測定に適用し、両者の組み合わせによりウエハ全体の形状を測定できるようにした。
(もっと読む)
走行路面形状測定データの処理方法
【課題】同一波長の走行路面変位が繰り返し連続する区間を効率的に管理するための、走行路面形状測定データの処理方法を提供する。
【解決手段】地点xにおける走行路面変位の測定波形f(x)を求め、この測定波形f(x)に波長λの正弦波が繰り返し現れる場合、その繰り返しを検出するために、次式(A)を用いてF(x)を算出し(Mは想定する繰り返し数であるが、処理後、前記波形F(x)の直流分を残すために、Mは偶数とする。α(N)は、ユーザーが定める係数である。)、この結果に基づいて繰り返しを考慮した、走行路形状の管理値を判定する。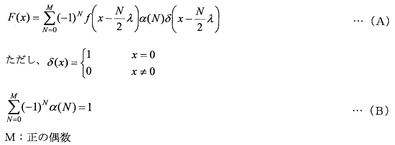 (もっと読む)
(もっと読む)
反り量測定装置、該反り量測定装置を有する浮上搬送コンベア、及び反り量測定方法
【課題】薄板Sの反り量の測定を測定するための装置(反り量測定装置47)を簡易なものにすること。
【解決手段】薄板Sを浮上させた仮想の浮上状態をシミュレーションして求められかつ薄板Sの固有の反り量と関連づけて薄板Sの板幅方向の位置と浮上量との関係を示す浮上挙動テーブルを参照しつつ、計測された薄板Sの浮上量に基づいて、薄板Sの固有の反り量を推定することにより、薄板Sの反り量を測定すること。
(もっと読む)
測定物保持装置及び方法並びに平面度測定装置
【課題】測定物を保持する際に測定物が自重の撓みにより変形されることのない測定物保持装置を提供する。
【解決手段】測定物11の平面度測定に用いられる測定物保持装置20であって、測定物11が載置される載置面11aを有する載置台40と、載置台40に、載置面4002から突出して測定物11を下方から複数箇所で支持し載置面4002からの高さが変更可能に設けられた複数の測定物支持部材60と、各測定物支持部材60が測定物11に対して均一な接触圧力で接するように各測定物支持部材60の載置面4002からの高さを変更する制御手段80とを備える構成にした。
(もっと読む)
一体化したターニング・センタを有する非接触検査システム
【課題】ロータの機械加工と非接触検査システムを一体化する。
【解決手段】非接触検査システム110は、制動表面を指す非接触センサ(112−1、112−2)の1つ以上の対及びディスクの外径を指す非接触センサを有する。非接触センサは、誘導性センサ、容量性プローブ及び/又はレーザ・センサである。システムは、制動表面102、104厚さ変動、横振れ、平坦さ、平行性及び直径等の種々の特徴及び特性を測定する。ディスクが指定速度で回転する間に又はディスクが停止している間に測定を行う。非接触センサ(112−1、112−2)の対は、センサ又は校正された表面から、その指した表面までの距離を連続的に測定する。他の2つのセンサ(115及び/又は117)は、センサ又は校正された表面から、その指した面までの距離を連続的に測定する。
(もっと読む)
測定方法及び測定装置
【課題】現場等での測定が可能でありながら、迅速な測定を行える測定装置及び測定方法を提供する。
【解決手段】ゼロ点誤差Δzは、始点と終点におけるプローブMPの傾斜の差αN0から容易に求めることができ、これにより、被測定面全体の形状を精度良く求めることができる。即ち、水準器ELで2回傾斜を読み取るのみでゼロ点誤差Δzを得ることができるから、測定時間の短縮を図ることができ、例えば現場等での作業も容易である。
(もっと読む)
金属帯板の形状測定装置
【課題】コンパクトな構造で、金属帯板の材質によらず精度よく形状を測定することができ、データ伝送においても外乱が小さい金属帯板の形状測定装置を提供する。
【解決手段】金属帯板1が巻き付けられるように設置され、表面に1本以上の螺旋溝30が形成され、螺旋溝30に径方向に貫通する穴である溝部穴40が2箇所以上形成される中空円筒10と、中空円筒10に嵌合する薄肉円筒20と、中空円筒10の内部を貫通し、この中空円筒10を回転可能に支持する静止軸50と、静止軸50の軸方向におけるそれぞれの溝部穴40に対応する位置に設置され、金属帯板1を薄肉円筒20に巻き付けたときの薄肉円筒20の変位を測定するセンサ60と、センサ60により測定した薄肉円筒20の変位から、金属帯板1の板幅方向における張力の分布を演算する演算手段120とを備えた。
(もっと読む)
路面平坦性測定装置
【課題】 IRI算出において予め定められた測定区間長内で試験車の走行速度が変化してもそれに対応することを容易にすると共に、時々刻々の速度変化毎に速度補正ができるようにして、より精度の良い測定を可能にすること。
【解決手段】 本発明の路面平坦性測定装置は、試験車の車軸側(またはサスペンション下側)に位置する加速度計1と、サスペンションが支持する車体側(またはサスペンション上側)に位置する加速度計2と、試験車の走行速度を測定するためのGPSレシーバ3と、測定データを収集して一時記録する収録装置4と、測定データからIRI(国際ラフネス指数)を算出するパーソナルコンピュータ(以下、「PC」と略称する)5と、を備える。PC5は、各機器の制御とIRIの算出とを各々別タスクで制御し、タスク間の測定データの受け渡しはファイル及び共通(グローバル)変数で行う。
(もっと読む)
平坦度測定方法および平坦度測定装置
【課題】各種装置におけるステージなどが有する平面の平坦度を、容易かつ高精度に測定する技術を提供することを目的とする。
【解決手段】板状部材2をステージ1の載置面10の第1位置POS1に載置したときと、第2位置POS2に載置したときとにおける、板状部材2表面の高さ位置をそれぞれ測定する。次に、測定地点(X1,Yi)における測定結果D1(=A(i)+B(i))と、測定地点(X1,Yi-1)における測定結果D2(=A(i)+B(i-1))の差分をとることによって、板状部材2の厚み成分を相殺し、測定地点(X1,Yi)および(X1,Yi-1)間の載置面10の高さの変化量(=B(i)−B(i-1))を算出する。そして、これらの差分演算処理結果を累積加算することによって、各位置における載置面10の基準高さ位置からの変位量を算出できる。
(もっと読む)
金属帯の形状測定装置
【要 約】
【課 題】 極薄金属帯の形状を精度良く測定する形状測定装置を提供する
【解決手段】 金属帯を垂直方向に搬送する搬送手段と、金属帯に付加される張力を制御する張力制御手段と、金属帯の搬送速度を測定する速度測定手段と、非接触式距離計によって得られた測定データから金属帯の形状指標を演算する演算手段と、を有する金属帯の形状測定装置。
(もっと読む)
ウェーハ平坦度計測方法、ウェーハ平坦度計測装置および計測データ処理装置
【課題】CMP工程の状態を管理する上で、より有用で、より精度の高いウェーハの平坦度を取得する方法の提供。
【解決手段】計測データ処理装置10は、集積回路のマスク形状データに基づきCMP工程で生じる可能性のある窪み部の位置を予測し(窪みデータ生成部102)、その窪み部の上層で生じる可能性のある欠陥の位置を予測し(欠陥候補位置抽出部102)、欠陥のあることが予測される窪み部の中から、AFM20が表面形状データを取得すべき計測位置を決定し(計測位置決定部103)、その計測位置データを付して、AFM20に表面形状データの取得を指示する(表面形状データ取得部104)。また、計測データ処理装置10は、AFM20により計測された表面形状データを、AFM20から取得し(表面形状データ取得部104)、表示装置40に表示する(表示部105)。
(もっと読む)
表面形状測定装置及び露光装置
【課題】単純な構成で高精度に被測定物体の表面形状を測定する表面形状測定装置及び露光装置を提供する。
【解決手段】表面形状測定装置は、光源からの白色光をモスアイ形状の反射防止部を有するプリズムを用いて基板と参照面に80度以上の入射角で入射させ、白色干渉光を得る。波長選択が可能な光学フィルターを用いて白色干渉光を複数の単一光による干渉光に分解する。その複数の干渉光に対して高速フーリエ変換を行いパワースペクトル分布を求め、スペクトルのピーク位置情報を用いて基板の表面形状を測定する。
(もっと読む)
測定装置
【課題】長尺の真直形状や大型の平面形状を測定するために水準器に代わる道具として、被測定面に接する点と変位センサあるいは角度センサの組み合わせで多点方を実現するために、被測定面上を走査移動可能なセンサホルダを提供する。
【解決手段】被測定面に対して相対的に移動可能なセンサホルダを、被測定面に対して少なくとも2点の接点を有する形態にして、センサホルダと被測定面との2つの接点とセンサホルダの保持するセンサの測定点との3点によって、真直形状測定のための3点法と動揺の差動出力を得て、その出力から形状を求める。
(もっと読む)
XYステージ
【課題】バーミラーの形状、スライダの走り、スライダのヨーイング角の情報を、高精度に識別して測定可能な機能を備えるXYステージを実現する。
【解決手段】プラテン上をX軸方向及びY軸方向に位置制御されるスライダと、前記スライダの一辺近傍に配置されたバーミラーと、このバーミラーに光を当てて距離を計測するレーザ干渉計とを具備するXYステージにおいて、
前記バーミラーに沿って等間隔に固定配置された3個の距離計と、
前記スライダを所定距離づつn回(n≧2)平行移動させるスライダ移動手段と、
前記スライダの初期位置及び所定距離の移動毎に、前記距離計の測定値に基づいて前記バーミラーの形状、前記スライダの走り、前記スライダのヨーイング角の少なく共いずれかを演算するバーミラー形状演算装置と、
を備える。
(もっと読む)
近接露光装置及び基板の製造方法
【課題】1軸方向にのみ移動可能なワークステージを備える簡素な機構の近接露光装置において、ワークステージに搭載された基板の平坦度を2次元で精度よく測定することができる近接露光装置を提供する。
【解決手段】基板Wを保持して一軸方向(例えば、X方向)に移動可能なワークステージ1と、マスクステージ2上に配置されてセンサ駆動機構47によりワークステージ1の移動方向と直交する方向(例えば、Y方向)に移動されるギャップセンサ40とを備え、ワークステージ1及びギャップセンサ40を互いに直交する方向に移動させて基板Wの平坦度を2次元で測定する。
(もっと読む)
幾何学量計測方法及び幾何学量計測装置
【課題】センサヘッドにおけるセンサの設置ずれ量及びセンサヘッドと計測対象との間の相対傾斜に起因する誤差を無くすことのできる幾何学量計測方法を提供する。
【解決手段】少なくとも3個のセンサを配置したセンサヘッドを計測対象に沿って相対移動させ、各センサから得られる検出信号を用いて計測対象表面の幾何学量を計測する。予め、基準平面30に対して真直度の計測を行い、両側のセンサの基準点を結ぶ線分からの中央のセンサの基準点の計測方向に関するずれ量を算出すると共に、基準平面とセンサヘッドとの間の相対傾斜とずれ量との間の関係を対のデータとして補正テーブルを作成する。幾何学量の計測に際しては、計測対象とセンサヘッドとの間の相対傾斜を算出し、かつ前記補正テーブルを参照して前記算出されたずれ量を取り出し、該取り出したずれ量と3個のセンサから得られた検出信号を用いて計測対象表面の幾何学量を演算する。
(もっと読む)
パターン生成装置及び表面の物理特性を測定するための装置
【課題】パターンを書き込む際に生じるあらゆる物理的変形に無関係に、オブジェクトの表面にパターンを書き込むための方法及びパターン生成装置を提供すること。
【解決手段】本発明は、露光装置での使用を対象とするオブジェクトの表面にパターンを書き込むための方法であって、表面を備えた厚さTのオブジェクトをパターン生成装置のステージの上に配置するステップと、表面を多数の測定ポイントに分割するステップであって、隣接する2つの測定ポイントが所定の最大距離を越えない距離Pで間を隔てられているステップと、各測定ポイントにおける表面の勾配を決定するステップと、各測定ポイントのx−y平面における二次元局部オフセットdを勾配及びオブジェクトの厚さTの関数として計算するステップと、前記表面に書き込むパターンを、二次元局部オフセットdを使用して修正するステップとを含む方法を提供する。
(もっと読む)
測定システム、測定方法及びプログラム
【課題】形状を高精度で信頼性よく測定することが可能な測定システム、測定方法及びプログラムを提供する。
【解決手段】測定対象物10の設計形状を規定する第1及び第2形状因子の公差を格納する外部記憶部26と、測定対象物10の第1形状因子の測定データを得る測定器14と、第1形状因子の測定データと外部記憶部26から読み出した第1形状因子の公差とを比較する比較部32と、測定データから予測形状を構成して図形として成立するか検証する検証部34と、検証部34が構成した予測形状から第2形状因子の予測データを計算する計算部36と、計算部36が計算した予測データを外部記憶部26から読み出した第2形状因子の公差と比較して測定形状を判定する判定部38とを備える。
(もっと読む)
1 - 20 / 41
[ Back to top ]