
Fターム[2F069AA71]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 角度 (430)
Fターム[2F069AA71]の下位に属するFターム
Fターム[2F069AA71]に分類される特許
121 - 140 / 166
乗員保護装置のためのロール角算出の方法および装置
本発明は乗員保護装置のためのロール角算出方法および関連する装置に関する。本発明によれば、車両の横加速度(ay)と垂直加速度(az)が検出され、検出された横加速度(ay)と検出された垂直加速度(az)に基づいて車両のロール角(α)が推定され、その際に、さらに車両速度(v)、ヨー角(ψ)および横滑り角(β)を含む他の走行動特性値が求められ、ロール角(α)の推定を改善するために、前記走行動特性値から向心加速度(v2/r)が計算される。  (もっと読む)
(もっと読む)
ホーム離れ計測方法およびその装置
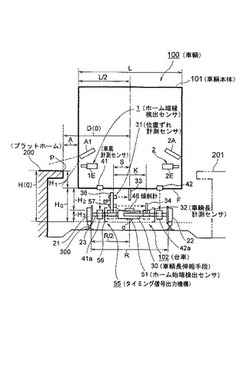
【課題】駅のプラットホームの建築限界の計測を迅速に且つ高精度に実行すること。
【解決手段】駅のプラットホーム200に沿って進行する車両本体101の側端とホーム側端縁Pとの間の距離情報Aを検出する手段と、この検出動作とほぼ同一のタイミングで作動して車両101が進行する軌道300の中心位置Oを検出する手段と、この計測された軌道中心位置Oと当該軌道300上を進行する車両本体101の中心位置との間の位置ずれΔSLを検出する手段とを備え、これら計測された所定の情報等に基づいて当該車両100が走行する軌道300の中心位置Oからプラットホームの側端縁Pまでの水平距離等をホーム建築限界情報として算定するようにした。
(もっと読む)
車両のロール警報装置及びロール警報方法

【課題】 簡単な処理によって車両の走行状態に応じた最適時にロール警報を発する。
【解決手段】 車速センサ22は車速を検出し、傾き量算出部20は車両の車幅方向の傾き量を算出する。継続上限時間記憶部24には傾き継続時間の上限値が車速に対応して予め記憶され、傾き量判定部21は、ロール警報設定値をロール警報設定値記憶部19から取得し、傾き量算出部20が算出した傾き量がロール警報設定値を超えたか否かを判定する。タイマ26は、傾き量がロール警報設定値を超えたと傾き量判定部21が継続して判定しているとき、その継続時間を計数する。継続時間判定部25は、車速センサ22が検出した車速に対応する傾き継続時間の上限値を継続上限時間記憶部24から取得し、タイマ26の計数値が上限値に達したか否かを判定する。警報器23は、タイマ26の計数値が上限値に達したと継続時間判定部25が判定したとき、運転者に対して警報を発する。
(もっと読む)
路面性状測定装置
【課題】一台でキメ深さやIRIを測定できる多機能の路面性状測定装置であって安価かつ高精度なものを車載可能とすべく、移動距離計の測定値からタイヤ変形等の悪影響が取り除かれるようにする
【解決手段】車両に移動距離計15と高さ計16と高さ計51と演算部20とを搭載する。高さ計16,51には、排水用凹部の開口幅より短い第一基準長Nに対応した狭い範囲を測定するものを、採用する。演算部20は、移動距離測定値ΔSと高さ測定値K,Jとに基づき踏面算出を行って第二基準長M対応のIRIを算出し、移動距離測定値ΔSと高さ測定値Kとに基づき踏面算出を行わないで第一基準長N対応のキメ深さ等を算出し、更に基準長Mだけ離れた高さ計16,51での路面形状について相関を算出して選択的に移動距離測定値ΔSを校正する。
(もっと読む)
車両のロール警報装置及びロール警報方法
【課題】 簡単な処理によって車両の走行状態に応じた最適時にロール警報を発する。
【解決手段】 車速センサ22は、車両の車速を検出する。傾き量算出部20は、左右のハイトセンサ16,17からの検出値に基づき、車両の車幅方向における傾き量を算出する。ロール警報設定値記憶部19には、ロール警報設定値が車速に対応して予め記憶されている。判定部21は、車速センサ22が検出した車速に対応するロール警報設定値をロール警報設定値記憶部19から取得し、この取得したロール警報設定値を、傾き量算出部20が算出した傾き量が超えたか否かを判定する。警報器23は、傾き量がロール警報設定値を超えたと判定部21が判定したとき、車両の運転者に対して警報を発する。
(もっと読む)
形状計測方法およびそのシステム
【課題】計測時間の短縮化を図ることを可能にするとともに、測定対象物の色や傾斜による制約を排除することのできる形状計測方法およびそのシステムを提供する。
【解決手段】撮像手段により測定対象物を撮影して得られた撮像データと上記測定対象物のCADデータとを比較照合することにより、上記測定対象物の位置・姿勢を推定して上記測定対象物の位置・姿勢推定データを取得し、上記取得した位置・姿勢推定データに基づいて、上記測定対象物における計測点間では接触式プローブを高速で移動させ、上記測定対象物が存在すると推定される位置の近傍に上記接触式プローブが到達すると減速を開始し、上記接触式プローブを低速で上記測定対象物に接触させ、上記接触式プローブが上記測定対象物に接触すると上記接触式プローブを停止させて計測を開始するようにした。
(もっと読む)
ボトル缶の測定方法
【課題】 より精度よくネジ部を測定することができるボトル缶の測定方法を提供すること。
【解決手段】 外周面にネジ部14が形成された口金部13を有し、前記ネジ部14が山部17を介して形成された第1及び第2谷部18、19を有する金属製のボトル缶の測定方法において、前記口金部13の輪郭線を取得し、該輪郭線上で前記山部17の頂点P3と前記第1谷部17の底点P1との間に設けられた2点間を結ぶ直線L5と、前記輪郭線上で前記頂点P3と前記第2谷部19の底点P2との間に設けられた2点間を結ぶ直線L6とを設定し、前記直線L5と前記直線L6とがなす角度を測定する。
(もっと読む)
回転角検出装置及びこれを用いた電動パワーステアリング装置
【課題】 信号の強度への依存を低減し、異常の判定時間を短縮した角度検出装置及びこれを用いた電動パワーステアリング装置を提供する。
【解決手段】回転体1の回転に伴って発生する正弦波信号sinθ及び余弦波信号cosθの少なくとも一方の信号を用いて前記回転体の回転角度を検出する回転角検出装置10であって、前記信号の単位時間あたりの変化量に基づいて前記回転角検出装置の異常を判定することを特徴とする。また、この回転角検出装置10を用いて電動パワーステアリング装置のモータ角度を検出する。
(もっと読む)
3次元計測方法および3次元計測システム
【課題】非接触の計測に際して対象物の配置にずれがあっても、ティーチングで想定された最適の計測を実現する。
【解決手段】3次元計測方法は、非接触センサと、センサの位置および姿勢を変更する数値制御の可能なセンサ移動機構とを用い、あらかじめティーチングによって設定された複数の位置および各位置でのセンサ姿勢を指し示す計測経路情報に則って非接触センサを移動させ、それによって物体の形状を非接触で計測するものであり、予備計測経路情報に従って対象物に対する予備3次元計測を行い、予備3次元計測で得られた形状データとティーチングにおける計測対象である想定対象物の形状データとによって、対象物と想定対象物との位置ずれを検知し、検知した位置ずれに応じて計測経路情報を修正し、修正された計測経路情報に従って対象物の3次元計測を行う。
(もっと読む)
オブジェクトの表面の3D座標を判定する方法
【課題】オブジェクトの3D座標を判定する方法を提供する。
【解決手段】3D測定装置(3)によって、オブジェクトの部分表面領域(6)の3D座標を判定する。3D測定装置(3)は、1以上の検出器(4)を備えており、3D測定装置(3)の位置は、トラッキングシステムによって判定される。オブジェクトの隣接する部分表面領域(7)の3D座標は、3D測定装置(3)によって判定される。隣接する部分表面領域(6,7)の重複領域の3D座標は、マッチング法によって統合される。それを行う際、誤差関数が判定され且つ反復的に最小化される。さらに、3D測定装置(3)の検出器(4)の誤差関数が判定される。
(もっと読む)
検査基準設定装置及び方法、並びに、工程検査装置
【課題】工程検査において不良兆候を検出するための検査基準を適切に設定するための技術を提供する。
【解決手段】情報処理装置が、工程検査の各検査項目について抽出された特徴量、及び、最終検査の判定結果を記憶手段に蓄積し、記憶手段に蓄積された複数の製品のデータから、検査項目毎若しくは検査項目の組み合わせ毎に、最終検査で良品と判定された製品群の特徴量の分布と、最終検査で不良品と判定された製品群の特徴量の分布との分離度を算出し、検査項目若しくは検査項目の組み合わせの中から、その分離度の大きさに基づいて、検査基準を再設定すべき検査項目を選択し、選択された検査項目に対して新たな検査基準を設定する。
(もっと読む)
三次元ワーク測定方法
【課題】 厳格な位置決めを必要とせず、ワークを測定できる三次元ワーク測定方法を提供する
【解決手段】 測定対象であるワーク40を、測定用ロボット20により三次元測定するための三次元ワーク測定方法であって、ワーク40上に設定された基準点のうち一点を位置決めピン12aに位置合わせして、基準点を測定する第1測定工程(ステップS5、S9、S21〜S37)と、ワーク40と同様の基準点が設定された設計値通りの理想ワークを、該基準点のうちの一点を位置決めピン12aに合わせた所定の姿勢で配置したと想定して、該理想ワーク上の基準点とワーク40の基準点の測定結果とを比較する比較工程(ステップS38)と、比較結果に基づいて、ワーク40上の測定点を測定するための前記ロボットの測定位置を補正する補正工程(ステップS6、S10、S41)と、補正した測定位置から、ワーク40上の測定点を測定する第2測定工程(ステップS42〜S48)と、を有する三次元ワーク測定方法。
(もっと読む)
パネル部材検査装置及びそれに適用される位置情報補正プログラム
【課題】
現場での組み立て調整が容易で輸送もでき、その結果として生産場所をも制限されなくなるパネル部材検査装置を提供する。
【解決手段】
矩形板状をなすベース2と、そのベース2上を長手方向に移動可能に設けたパネル載置台3と、前記ベース2上に長手方向と直交して跨るように設けた門型をなすヘッド支持体4と、前記ヘッド支持体4によって長手方向と直交する方向に移動可能に支持させた検査機器支持用ヘッド5とを備えたパネル部材検査装置1において、ベース2とヘッド支持体4との間で2分割可能に構成し、各分割体の大きさを所定以下にできるようにするとともに、ベース2とヘッド支持体4との間に、それらを結合させるときの相対的な位置決めを行う位置決め機構7を設けた。
(もっと読む)
画像処理方法および画像処理装置
【課題】 複数のMR体験者が、同一の複合現実感を体験する場合、体験者同士が接触する可能性があり、本願発明は、MR体験者に接触する可能性のあることを報知することができる画像処理装置を提供することを目的とする。
【解決手段】 ユーザの視点位置および方向から撮像された現実世界画像を描画し(S401)、このときのユーザの視点位置および視線方向がセンサ部により検出され、その視点位置が、接触の可能性のある注意距離内であるか否かが判定し(S403〜S404)、注意距離内であれば、その旨の注意表示がなされる(S405〜S406)。
(もっと読む)
配置測定装置および配置測定方法
【課題】空間内に存在する物品の配置を正確に測定することができる配置測定装置および配置測定方法を提供する。
【解決手段】タグ10には、このタグ10が貼付される物品の形状に関する形状情報が記憶されている。計算部13は、位置測定部11により測定された所定の空間におけるタグ10の位置に関する位置情報と、読み出し部12により読み出されたタグ10に記憶された形状情報とに基づいて、物品が実際に上記所定の空間上に置かれている位置、姿勢、他の物品との位置関係等の物品の配置を計算する。
(もっと読む)
ドリル穴測定装置および削岩装置
本発明は、ドリル穴測定装置と、この測定装置を装備した削岩装置とに関するものである。測定装置(1)は保護要素(3)を有し、その内側においてセンサ(6)を移送装置(4)によって移送可能である。  (もっと読む)
(もっと読む)
計測装置、駆動ユニット及びその製造方法、光学ユニット、光学装置並びに露光装置
【課題】インナーリングとアウターリングの位置関係を高精度に計測する。
【解決手段】調整工程(ステップ210)において調整された第1、第2センサヘッドと第1、第2スケール部とを固定工程(ステップ212)において固定し、該固定した状態で、各センサのスケール部をインナーリングに接続し、各センサヘッドをアウターリングに接続する(ステップ214)。そして、解除工程(ステップ216)において、スケール部とセンサヘッドとの固定を解除する。従って、取り付け後に各センサの計測軸間の位置姿勢関係の調整が不要となる。また、取り付け前に計測軸間の位置姿勢関係の調整が行われるので、その位置姿勢関係の高精度な調整、設定が可能である。
(もっと読む)
プローブの姿勢補正機能を有する三次元座標測定装置
【課題】 被測定物を入れ替えながら繰り返し測定を行う場合に適したプローブ姿勢の補正技術を提供し、入れ替え測定の作業効率を改善する。
【解決手段】 本発明の三次元座標測定装置は、プローブ姿勢制御部、座標設定部、基準座標記憶部、角度差検出部、および姿勢補正部を備える。プローブ姿勢制御部は、プローブの姿勢を制御する。座標設定部は、被測定物の配置状態を取得して、三次元座標値の基準とする基準座標を設定する。基準座標記憶部は、第1被測定物に設定された第1基準座標を記憶する。角度差検出部は、第2被測定物に設定された第2基準座標を取り込み、基準座標記憶部の第1基準座標と、第2基準座標との角度差を求める。姿勢補正部は、第2被測定物の三次元測定に際して、第1被測定物に対して調整されたプローブの姿勢を角度差に応じて姿勢補正する。
(もっと読む)
平面度測定方法と装置
【課題】 簡単な構成で、効率的に平面度を求めることができる平面度測定方法と装置を提供する。
【解決手段】 互いに直交する方向の傾斜を検知する傾斜計12と、傾斜計12が取り付けられた本体14と、本体14の下面14aから突出した3点の測定子15,16,17と、傾斜計12により検知した傾斜を記憶しその傾斜の測定子間の距離から測定対象部位の変位を求めるコンピュータ等の演算手段とを備える。傾斜計12は、傾斜により動く電極間の静電容量の変化を2方向同時に検知する。3点の測定子15,16,17を測定対象面20に載置し、測定子15,16,17のうちの1点に対する他の2点の平面上での位置と傾斜を検知し、次に本体14を移動させて、先に検知した2点のうちの少なくとも1点に測定子16を合わせて、測定対象面20の他の点の変位を検知する。
(もっと読む)
電子機器及び状況通信装置
【課題】 少なくとも一部が外側に凸な曲面を有し、当該曲面を重力方向に向けて他の物体上に載置可能な筐体の電子機器及び状況通信装置を提供する。
【解決手段】 接触センサ3が物体に接触し、かつ、姿勢センサ31により接触センサ3が重力方向を向いている姿勢がとられていることを検出すると、モータ7を右回転させると、モータ回転軸10も足支え板6の貫通孔61内を右回転してせり上がってゆく、すると相対的に足支え板6がストッパー12に接触するまで下へ下がることになり、足21〜23が筐体2から突出される。また、状況通信装置100が持ち上げられた場合には、接触センサ3が物体への接触を検知しなくなるので、モータ7が左回転させられる。すると、足支え板6は回転と共に移動し、ストッパー11に接触するまで上がってゆき、足21〜23が格納される。
(もっと読む)
121 - 140 / 166
[ Back to top ]