
Fターム[2F069AA71]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 角度 (430)
Fターム[2F069AA71]の下位に属するFターム
Fターム[2F069AA71]に分類される特許
61 - 80 / 166
位置決定システム
本発明は、オブジェクト(2)の位置を決定するための位置決定システム(201)に関する。第一位置検出ユニット(205)が、送受信ユニット(203、214、216、217)によってオブジェクト(2)と基準位置に対して知られている転送位置との間で転送される放射に基づいて、オブジェクト(2)の第一の位置を検出する。第二位置検出ユニット(35)が、オブジェクト(2)の加速度および決定された前記第一の位置に基づいて第二の位置を検出する。出力ユニット(12)が、第一の位置および第二の位置の少なくとも一つを出力する。放射の転送が遮られても、第二の位置が出力ユニットによって出力されることができる。さらに、第一の位置が、第二の位置を決定するまたは第二の位置を更新するための初期値として使用されることができる。これはオブジェクトの位置決定の品質を改善する。 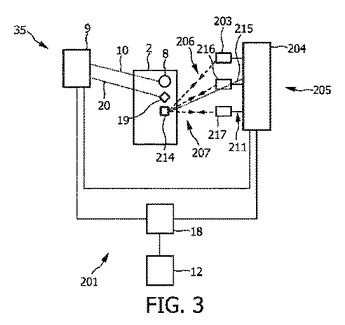 (もっと読む)
(もっと読む)
金属板の面歪みの評価方法、金属板の面歪みの評価値演算装置及びプログラム

【課題】評価対象の金属板の面歪みを直接的、定量的に評価できるようにする。
【解決手段】測定装置200により取得された金属板1の表面形状の計測値を入力とし、補間部102において、測定装置200による計測値を直交格子状に補間した上で、ガウス曲率計算部103において、直交格子点上の値、すなわち測定装置200による計測値が直交格子点上にあればその計測値、測定装置200による計測値が直交格子点上になければ補間計算値を用いてガウス曲率を計算する。
(もっと読む)
測定装置及び測定方法

【課題】水準器やオートコリメータの特性を十分に生かすために静止状態で用いて、基準定規を反転の代わりに走査方向にシフトすることで、改良型反転法と同様の効果を上げ、センサを多くて2本、少なければ一本で測定システムを構成することで3点法のようなセンサのドリフト特性の不整の影響を受けにくい測定装置及び測定方法を提供する。
【解決手段】被測定面の形状を間隔D毎に測定してその差分を得るために、比較用の補助基準を測定走査方向に間隔Dだけシフトして、更に測定を行うことで、シフト前後の補助基準の変形の影響を最小限に抑えることができる。このシフトを使う方法では、シフト前後の補助基準の姿勢変化が測定形状の放物線誤差になるが、これを水準器やオートコリメータ等の傾きセンサで測定して、補正する手段をとるので、測定結果より放物線誤差を有効に排除できる。
(もっと読む)
鋼材の変位表示方法及びシステム
【課題】鋼材の地中変位を、当該鋼材の挿入過程において、正確に把握することができ、しかも、装置コストが嵩まない鋼材の変位表示方法とする。
【解決手段】傾斜計11を用いて地中に挿入された鋼材2の傾斜情報を取得し、この傾斜情報を用いて鋼材2の変位を算出し、この算出変位を表示する方法であって、鋼材2の挿入に先立って、傾斜計11を鋼材先端部2aに固定し、鋼材2の挿入過程において、連続的に又は所定の深度ごとに傾斜情報を取得し、鋼材2の挿入完了後、傾斜計11を、この傾斜計11に取り付けた線材13を地上から引いて回収する。
(もっと読む)
軌道鉛直変位計および軌道鉛直変位計測方法
【課題】
軌条の挙動特に鉛直方向変位の計測は安全管理面から極めて重要であるにもかかわらず直接的に計測することは振動、衝撃等の影響から一般的には行なわれていないのが現状である。
【解決手段】
(1)電解液傾斜受感素子を内蔵し、取付面部とスペース部材を有した軌道鉛直変位計を提供する。
(2)前記軌道鉛直変位計を軌条の一定区間毎に複数設け、これら出力を鉛直方向変位量に変換するようにした軌道鉛直変位計測方法を提供する。
(もっと読む)
路面バンク角推定装置
【課題】車輪に路面から作用する力を検出するための力センサを必要とすることなく、安価な構成で、路面のバンク角を安定に推定する。
【解決手段】車輪と路面との間の摩擦特性モデルを含む車両モデルを用い、水平面上での車両横力モデル推定値Fgy_total_estmを求めると共に、これを車両質量mで除算してなる横加速度モデル推定値Accy_estmを求める手段と、横加速度モデル推定値Accy_estmと横加速度センサ15の出力が示す横加速度検出値Accy_sensとの偏差を求める手段と、該偏差から路面のバンク角の暫定推定値を求め、該暫定推定値をハイカット特性のフィルタに通すことにより路面のバンク角推定値θbank_estmを求める手段とを備える。
(もっと読む)
エンジンマウントの変位量計測方法
【課題】エンジンやボデーにたわみ等の変形が生じた場合であっても、エンジンマウントの変位量をグローバル座標系において算出することができ、さらに、車両の進行方向等を考慮した車両座標系に対する変位量をも算出することができる、エンジンマウントの変位量計測方法を提供する。
【解決手段】本発明に係るエンジンマウントの変位量計測方法は、センサ座標系におけるエンジンマウント10の変位量を計測する変位量計測工程と、重力作用方向及び東西南北方向を計測することでグローバル座標系を設定するグローバル座標系設定工程と、センサ座標系のグローバル座標系に対する姿勢角を算出する姿勢角算出工程と、姿勢角算出工程で算出した姿勢角に基づいて、変位量計測工程で計測したエンジンマウント10の変位量を前記グローバル座標系における変位量に変換するグローバル座標系変換工程と、を備える。
(もっと読む)
形状測定方法及び測定機能を有する機械
【課題】テーブルに固定されているワークの測定基準面が傾いている場合でもワークの形状を精度良く測定することができ、測定作業を簡単に行うことができる形状測定方法及び測定機能を有する機械を提供する。
【解決手段】測定ヘッド9がワーク7に対してアプローチする複数の測定動作方向を画面に表示するステップと、複数の測定動作方向のうちからワーク7の測定基準面2にアプローチするいずれか一つの測定動作方向を選択するステップと、ワーク7の測定基準面2上の3点の座標値を選択された測定動作方向へアプローチさせて測定するステップと、測定した3点の座標値に基づき測定基準面2を装置1の主軸3の軸線CLに対して垂直に向けるのに必要とされる回転送り軸の割出し角度を演算するステップとを含み、ワーク7の形状を測定する。
(もっと読む)
形状測定装置
【課題】高い測定精度を有する形状測定装置を提供する。
【解決手段】形状測定装置100は、被測定物体15の形状を測定して測定値を出力するプローブ12と、所定の空間内でプローブ12を移動させる移動機構部であるアーム部11に、プローブ12を着脱する取付部16と、空間内におけるプローブ12の空間座標を測定する空間座標測定部30と、プローブ12により測定された被測定物体15の測定値を、空間座標測定部30により測定されたプローブ12の空間座標により補正する制御部20,50と、を有して構成される。
(もっと読む)
プローブのアライメント調整方法および形状測定機
【課題】作業者の熟練度に左右されることなく、プローブの角度を能率的かつ高精度に調整することができるプローブのアライメント調整方法および形状測定機を提供。
【解決手段】軸部の先端に接触部を有するプローブと被測定物とを相対移動させるとともに、その相対移動方向に対して直交しかつ軸部と交差する方向からプローブの移動軌跡画像を撮像する工程ST2と、撮像されたプローブの移動軌跡画像から相対移動方向を示す基準直線L1および軸部の傾きを示すプローブ軸線L2を抽出する工程ST3と、抽出された基準直線L1に対するプローブ軸線L2の傾きを演算して求める工程ST4と、求められたプローブ軸線L2の傾きに基づいてプローブの傾きを調整する工程ST6とを備える。
(もっと読む)
測定装置
【課題】測定を効率よく行う。
【解決手段】測定装置11は、被検物の形状を測定する測定プローブ18と、被検物を載置する上面が水平面に対して所定の傾斜角度で傾斜可能とされ、複数の基準穴31が形成された回転テーブル21を有する傾斜回転テーブル14とを備えている。基準穴31は、回転テーブル21の傾斜軸L2に対し、回転テーブル21の上面から見て線対称となる配置で、回転テーブル21の外周の端部近傍の4箇所以上に形成されている。本発明は、例えば、傾斜回転テーブルを有する測定装置に適用できる。
(もっと読む)
歯車対の評価装置及びこの評価装置を用いて最適化された歯車対
【課題】各種歯車対のバックラッシュを精度よく定量的に把握することができる歯車対の評価装置を提供する。
【解決手段】演算部6は、ギヤ歯面102G及びピニオン歯面102P上の各3次元座標データを所定の噛合回転位置で互いに関連付けギヤ101Gを基準とする円筒座標系の3次元座標データに変換する。2次元の媒介変数を用いてピニオン歯面102P上の各点を表す関数を作成し、ギヤ歯面102G上の各点に対応するピニオン歯面102P上の各点をニュートン法を用いて演算する。これらの演算により歯面のドライブ側及びコースト側の歯面間隙間情報を求め、この歯面間隙間情報に基づいてバックラッシュ情報を求める。
(もっと読む)
運動推定装置及びプログラム
【課題】簡易な構成で、安定して移動体の運動を精度よく推定することができるようにする。
【解決手段】画像撮像部12によって異なるタイミングで複数の画像を撮像し、運動推定候補算出部20によって、撮像した複数の画像に基づいて、自車両の運動推定候補を複数算出する。また、ジャイロセンサ14によって、自車両のヨー角速度を計測する。信頼度判定部22によって、算出された複数の運動推定候補の各々について、信頼度を判定する。運動検証部26によって、ジャイロセンサ14によって計測されたヨー角速度、及び信頼度判定部22によって判定された複数の運動推定候補の各々の信頼度に基づいて、複数の運動推定候補のうちの何れか1つを、自車両の運動の推定結果として選択する。
(もっと読む)
キャップ検査装置及びキャップ検査方法
【課題】検査対象の容器の大きさが異なる場合でも容易に対応可能なキャップ検査装置を提供する。
【解決手段】口金部101にキャップCPを装着した樽100がコンベア2の搬送経路に沿って搬送され、樽100の上方からキャップCPの天面Uの傾斜を検知するキャップ検査装置1であって、搬送経路の上方に設けられ、天面Uの同一直線上にない3点の測定範囲A1〜A3までの距離を計測する計測ユニット3と、計測ユニット3の計測結果に基づいて、天面Uが傾斜しているか否かを判別する制御装置10と、を備えた。
(もっと読む)
バンク角制限装置
【課題】車両の挙動量が大きく変化する場合、あるいは、カーブが逆バンクである場合に、推定バンク角を制限して、該推定バンク角の値が不安定に陥らないようにする。
【解決手段】バンク角制限装置10Aは、ローパスフィルタ16を備えるローパスフィルタ部12と、車両の挙動量が所定の閾値よりも大きいか否かを判定する車両挙動判定部14とを有し、ローパスフィルタ部12は、前記挙動量が前記閾値よりも大きいと車両挙動判定部14が判定したときに、前記車両に搭載されたバンク角推定装置が推定した路面の推定バンク角をローパスフィルタ16を介して出力し、一方で、前記挙動量が前記閾値以下であると車両挙動判定部14が判定したときに、前記推定バンク角を直接出力する。
(もっと読む)
軌道位置データ付与システム及び軌道位置データ付与方法
【課題】軌道上を走行する車両に設置されたセンサから時系列的に出力される検査値データを軌道位置データと対応付けるのに際して、少ない処理で簡単に行うことができるようにする。
【解決手段】検査値データと同期して、車両上に設置された角速度センサによってヨー角速度を表す角速度データを順次取得して検査値データと共に時系列的に保存し、前記保存した角速度データの中で処理するべき範囲である処理区間を必要に応じて決定し、処理区間における角速度データと軌道管理図の曲線線形図とを比較することにより、処理区間における角速度データと軌道管理図の軌道位置データとの対応付けを行い、軌道位置データと対応付けられた角速度データに基づき、該角速度データと同期する検査値データを該軌道位置データと対応付ける。
(もっと読む)
センサドリフト量推定装置
【課題】車両運動の状態に関わらず、安定してセンサのドリフト量を推定することができるようにする。
【解決手段】姿勢角オブザーバ24によって、各センサの検出値に応じたセンサ信号に基づいて、車体の鉛直軸に対する姿勢角の微分量を算出する。運動方程式微分量算出手段26によって、センサ信号及び姿勢角オブザーバ24によって推定された姿勢角に基づいて、車両運動の運動方程式より得られる姿勢角の微分量を算出する。ドリフト量推定手段28によって、センサ信号のセンサドリフト量を考慮したときに、姿勢角オブザーバ24により算出された姿勢角の微分量と、運動方程式微分量算出手段26により算出された姿勢角の微分量にセンサドリフト量を考慮した値とが等しくなる関係を用いて、各センサ信号のセンサドリフト量を推定する。ドリフト量補正手段22によって、推定されたセンサドリフト量に基づいて、各センサ信号を補正する。
(もっと読む)
モーショントラッカ装置
【課題】光学マーカーに識別情報を持たせたり、1個1個順番に点灯させたりすることなく、各光学マーカーを確実に識別することができるモーショントラッカ装置を提供する。
【解決手段】 モーショントラッカ装置1であって、対象物10に作用する対象物角速度を短時間で検出する対象物角速度検出センサ4と、対象物10に作用する対象物加速度を短時間で検出する対象物加速度検出センサ5と、第一座標系の角度移動量を算出する第一座標系角度移動量算出部23と、第一座標系の位置移動量を算出する第一座標系位置移動量算出部27と、光学マーカー位置情報、第一座標系の角度移動量及び第一座標系の位置移動量に基づいて、光学マーカーの予想移動位置を推定する光学マーカー推定部26とを備え、光学マーカー位置情報算出部24は、光学マーカーの予想移動位置に基づいて、3個以上の光学マーカー7をそれぞれ識別することを特徴とする。
(もっと読む)
電子機器
【課題】衝撃による電子機器の損傷を正確に検出して、衝撃による弊害を理想的な状態で防止する。
【解決手段】電子機器は、加速度を検出する加速度センサ8と、この加速度センサ8で検出する加速度から落下高さを演算する演算回路52とを備えている。演算回路52は、加速度センサ8から入力される加速度信号を演算して落下高さを検出し、落下高さから落下の程度を判定している。
(もっと読む)
形状測定装置
【課題】被測定物の3次元形状を規定した測定点群から精度よく簡便に形状測定する形状測定装置を提供する。
【解決手段】被測定物の形状を規定した3次元の測定点群データ2が3次元測定装置8から出力されると、形状測定装置1の断面抽出部3が、測定点群データ2から所定の切断面に含まれる測定点を抽出した断面点群データ4を生成する。測長領域設定部5は断面点群データ4に測長領域を設定する。入出力装置7を介して、ユーザから測長領域の断面点群が指定されると、測長部6がその断面点群を用いて被測定物の外側寸法、内側寸法、2点間寸法、角度等を測定する。
(もっと読む)
61 - 80 / 166
[ Back to top ]