
Fターム[2F069AA71]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 角度 (430)
Fターム[2F069AA71]の下位に属するFターム
Fターム[2F069AA71]に分類される特許
141 - 160 / 166
傾斜角度計測装置
【課題】 傾斜角度検出手段の出力が飽和することに起因して、その飽和状態からの復帰後も演算手段の演算による傾斜角度が異常値を示すことを回避する。
【解決手段】 移動体Aの傾斜角度を検出する傾斜角度検出手段45の出力と、その傾斜方向での移動体Aの角速度を検出する角速度検出手段46の出力とに基づいて、移動体Aの傾斜角度を演算する演算手段48を備えた傾斜角度計測装置を、予め設定した閾値に基づいて傾斜角度検出手段45が飽和状態か否かを判別し、傾斜角度検出手段45が飽和状態でない場合には、演算手段48が、角速度検出手段46の出力に対する演算処理を行って、角速度検出手段46の出力に基づく演算値を更新し、傾斜角度検出手段45が飽和状態である場合には、演算手段48が、角速度検出手段46の出力に対する演算処理を停止して、角速度検出手段46の出力に基づく演算値を固定するように構成した。
(もっと読む)
測定装置
測定装置は、容器(14)の外部表面において指定された位置及び場所について座標を与えるものであり、容器(14)の外部表面と接するように構成されたベース(20)と、ベース(20)から上方に延びる測定スケール(42)を含んだレール(30)と、レール(30)によってスライド可能に支持されるヘッド(32)であって、このヘッド(32)をレール(30)に取り外し可能に固定するために用いられるクランプメカニズム(40)を含んだヘッドと、容器(14)の外部表面にイメージを投影する、ヘッド(32)によって収容されるレーザ(64)と、を含む。この測定装置は、指定された位置のノズル(12)の軸に対する半径方向位置及び角度位置と、指定された位置を与えたトランスデューサプローブ(111)のスキューとの両方を迅速に測定する。  (もっと読む)
(もっと読む)
スロットロッドのスロット形状検出方法

【課題】 SZonSZスロットの反転角度および捻回ピッチを測定することができるスロットロッドのスロット形状検出方法を得る。
【解決手段】 連続する短周期SZ撚りの反転角度の平均を算出して短周期SZ撚りの反転角度を検出する。また、短周期SZ撚りの最大反転角度と最小反転角度を検出し、前記最大反転角度から前記最小反転角度を差し引き、さらに前記短周期SZ撚りの平均反転角度を差し引くことで、長周期SZ撚りの反転角度を検出する。
(もっと読む)
磁気軸受装置の変位検出装置
【課題】 回転体の軸方向の変位を正確に検出することができ、しかも、アキシアル変位センサユニットの構造が簡単で、部品点数が少なくてすみ、製作が容易で、コストダウンが可能な磁気軸受装置の変位検出装置を提供する。
【解決手段】 2組のラジアル変位センサユニット6,7のそれぞれが、回転体1の外周部のターゲット部15,17に対向するように周方向に等間隔をおいて配置された4個のラジアル変位センサ16a,16b,18a,18bを備え、1組のアキシアル変位ユニット8が、回転体1の外周部のターゲット部17の軸方向両縁部に対向するように軸方向に間隔をおいて配置された1対のアキシアル変位センサ19a,19bを備えている。変位演算手段が、ラジアル変位センサの出力より回転体1の径方向の変位を演算し、アキシアル変位センサの出力より演算した値をラジアル変位センサの出力に基づいて補正することにより回転体1の軸方向の変位を演算する。
(もっと読む)
3次元形状計測方法および装置
【課題】評価対象の微小凹凸歪みが測定できる十分な精度を実現するとともに、3次元的にうねった滑らかな凸平面形状から定量的な凹凸歪みの評価を可能にすること。
【解決手段】3次元形状測定器10によって取得された3次元の点群データに基づき、ワークWの3次元形状を測定する3次元形状測定装置および方法において、ステージ2に沿って上下方向に移動する測定ヘッド1と、前記測定ヘッド1および前記ステージ機構2に接続され、前記ステージ機構2の駆動により得られた3次元の点群データから凹凸歪みを評価する制御処理装置3とから成り、異なる角度における一定距離毎に平行にずらした各断面において、基準点と前後の2点からなる傾斜の変化角度を基準点をずらしながらそれぞれデータを求めて、凹凸歪みの評価を行うものである。
(もっと読む)
トー角度測定装置及び測定方法
【課題】車両の設置位置が標準位置から大きくずれている場合であっても確実且つ高精度にトー角度を測定する。
【解決手段】トー角度測定装置10における測定ユニット18は、車両14のハブ16を着座台48に着座させると共に、第2ベース部材36に対して車幅方向及び平面視回転方向に移動自在な着座テーブル46と、該着座テーブル46から外側方に向かって延在する鉛直な測定面68を備える被測定部材70と、第2ベース部材36を基準として測定面68に対向するように設けられ、間隔y1だけ離れた2箇所から測定面68に対する距離x1、x2を計測する非接触距離センサ62a、62bとを有する。測定面68は、車幅方向に対して角度βの鋭角をなす向きに設定されている。
(もっと読む)
被測定物保持装置
【課題】 プローブ等の測定系に対する被測定物の基準平面及び座標を短時間で検出することができる被測定物保持装置を提供すること。
【解決手段】 保持治具1は、測定系に対してレンズ等の光学部品(被測定物)15を保持するものであって、保持治具本体16と、測定光学系に対する保持治具本体16の傾きを表すオプティカルパラレル(角度基準部)17と、保持治具本体16の原点位置を表す位置基準部18とを備え、オプティカルパラレル17と位置基準部18とが保持治具本体16に別々に配されている。
(もっと読む)
粉体の接触角測定方法、該粉体の表面自由エネルギー求出方法、該粉体の検査方法及び粉体
【課題】 従来、困難を伴った粉体の加圧成型ペレットを用いる粉体の接触角測定方法に比べて、容易で、かつ、粉体の種類にかかわらず測定することが可能な、新しい粉体の接触角の測定方法を提供する。また、前記測定方法で求めた接触角値を用いる粉体の表面自由エネルギー測定方法、前記接触角測定方法による粉体の検査方法、該検査方法により検査された粉体を提供する。
【解決手段】 下記(1)〜(4)の行程により測定することを特徴とする粉体の接触角測定方法:
(1)粉体をバインダー樹脂に相溶させた相溶体または分散させた分散体を用いて表面占有率の異なる複合体を2種類以上作製する作製工程。
(2)前記2種類以上の複合体の接触角をそれぞれ測定する測定工程。
(3)前記表面占有率の異なる複合体に対する前記測定工程により得られた接触角をプロットするプロット工程。
(4)前記プロット工程により線形回帰直線を求め、求められた前記回帰直線を基に前記粉体の接触角を求める工程。
(もっと読む)
ワークの位置決め具及びその位置決め方法
【課題】 構造を簡易にして、測定精度を向上させるワークの位置決め具及びその位置決め方法を提供する。
【解決手段】 測定台上に配置された6個の位相ガイド7に、内周面の6個の縦ボール溝10のそれぞれを嵌合させてセットされたワーク10の上端部W1に、内側クランパー61を装着する。次に、クランパー11が内側クランパー61に挿入されると、クランパー11の傾斜部62が、内側クランパー61のピン64に当接しながら下降するため、ピン64が周方向にスライドすると共に、内側クランパー61及びワークWが回転する。そして、各縦ボール溝10の一端が対応する位相ガイド7の一端に接触して、ワークWが周方向に位置決めされて固定されるので、測定中にワークWが周方向に揺動することなく、測定精度を向上させることができる。
(もっと読む)
歯車監視方法及びその装置
【課題】 きわめて簡便な手段で以って、互いに噛合う2つの歯車段の噛合い状態の良否を正確に判定可能として、歯車の回転状態の良否を正確に監視できる歯車監視装置を提供する。
【解決手段】 歯車軸と該歯車軸に取り付けられた歯車とよりなる歯車段を噛み合わせて構成される歯車伝動装置における歯車の回転状態を監視する歯車監視手段において、互いに噛合う複数の前記歯車段のそれぞれについて前記歯車軸の径方向の移動量を検出し、前記移動量検出値に基づき各歯車段毎の歯車軸の傾き量を算出し、前記各歯車段の傾き量算出値に基づき前記互いに噛合う歯車段の相対傾き量を算出し、該相対傾き量に基づき前記歯車の歯当たりを含む歯車の回転状態の良否を判定することを特徴とする。
(もっと読む)
情報処理方法および装置
【課題】 物体に装着した較正対象指標の該物体に対する配置情報と、該物体に装着したセンサの該物体に対する配置情報とを、同時に簡便かつ正確に求めることができるようにする。
【解決手段】 物体を客観視点位置から撮影した客観視点画像を取得し、センサの計測値を入力し、客観視点画像から較正対象指標の画像座標に関する情報を検出し、計測値と較正対象指標の画像座標に関する情報とを用いて、物体に装着した較正対象指標の物体に対する配置情報と、物体に装着したセンサの物体に対する配置情報とを求める。
(もっと読む)
自律移動装置、並びに物体及び自己位置検出システム
【課題】自律移動装置において、自律移動装置が移動する環境に置かれた物体の位置や形状及び自律移動装置の自己位置の認識を精度が高く、簡単な構成で安価に実現すること。
【解決手段】自律移動装置1は、自律移動装置以外の物体が存在する環境の中で自律的に移動するように用いられ、物体及び自己位置検出システム6と移動手段4とを備える。物体及び自己位置検出システム6は、環境の中に設置した物体の表面形状や位置の情報を記録したデータベース21と、位置測定手段3で取得された物体の表面形状とデータベース21に記憶された物体の表面形状とを照合し、その照合が一致した場合にデータベース21に記憶された物体の情報を走行計画手段23へ送信すると共に、その照合が不一致の場合に位置測定手段3で取得された物体の情報を走行計画手段23へ送信する照合手段20と、照合手段20から送信された物体の情報に基づいて自律移動装置1の走行経路を計画する走行計画手段23とを備える。
(もっと読む)
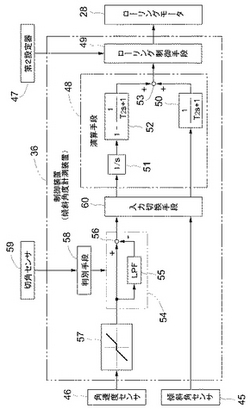
状態検出装置およびその状態算出方法
【課題】 状態センサの応答速度が遅い場合でも、速い応答速度で状態量を取得することができ、かつ状態速度センサのオフセットがある場合でも発散することなく状態量が取得できる状態検出装置とその状態算出方法を得る。
【解決手段】 本発明の状態検出装置は、状態速度センサ1の情報とオフセット補正値との差分Aを算出する第1演算器34と、算出差分Aを積分し積分値を算出する積分器31と、積分値に対し状態センサ1の応答遅れと等しいフィルタ値を算出する遅れフィルタ32と、前記フィルタ値と前記状態センサの情報との差分Bを算出する第2演算器35と、前記差分Bとゲインとの積を前記オフセット補正値とし、前記差分Bを前記積分値から差し引いた値を状態量検出値4とする第3演算器32とを設けたものである。
(もっと読む)
車両用信号処理装置
【課題】 走行中に検出した信号のみを用いて、車両の走行に関わる内部環境や外部環境を推定することのできる車両用信号処理装置の提供を目的とする。
【解決手段】 車両走行時に、車両バネ下におけるタイヤの所定方向の振動を検出する振動検出手段と、振動検出手段において検出した振動から、基準値となる周波数成分を所定の周波数帯域から抽出する基準周波数成分抽出手段と、振動検出手段において検出した振動から、比較値となる周波数成分を所定の周波数帯域から抽出する比較周波数成分抽出手段と、基準値となる周波数成分と比較値となる周波数成分とを含む周波数成分の組み合わせに基づいて、車両の走行に関わる内部環境と外部環境とのうち少なくとも1つの環境を推定する推定手段とを有する。
(もっと読む)
磁気ディスク用サスペンションの捩れ角測定方法及び測定装置
磁気ディスク用サスペンションの捩れ角測定において、磁気ディスク用サスペンションの基準面を、既知の捩れ角が設定された平滑な基準平面を有する治具上に加圧して固定する取付け手順と、前記治具に固定した前記サスペンションにおけるスライダ搭載面の前記基準面に対するロール方向及びピッチ方向の捩れ角を測定する測定手順とから構成される。 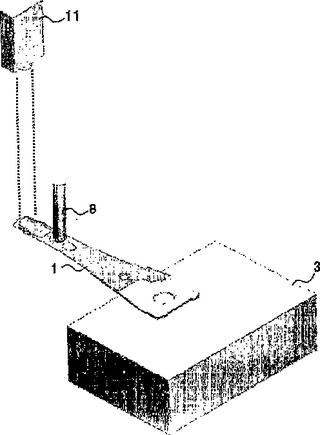 (もっと読む)
(もっと読む)
小さい対象物の表面再構成のための較正ソフトウェア
ゲージ測定システム内で回転台又はプラットフォーム(10)に取付けた対象物(12)の回転軸線(AR)を求めるための方法を提供する。本方法は、異なるポーズで取得した対象物(12)の複数のビュー又は測定値間の変換(δ)を推定することによって対象物(12)の回転軸線(AR)を求める。まず、回転軸線の周りで増分的に回転させた対象物(12)の複数のポーズの各々について、該ポーズを表す測定値セットを取得し、測定値セットの連続する対から、前記複数のポーズの各々間での増分回転に対する剛体変換(δ)を推定し、推定剛体変換を推定回転値と推定並進値とに分解し、回転値及び並進値から回転軸線を推定する。  (もっと読む)
(もっと読む)
バランスマシンのアンバランス修正位置及び修正量の自動補償方法
【課題】アンバランスが修正された回転子を検査するアンバランス測定ユニットにおいてアンバランス量が良品範囲を脱した回転子の場合、アンバランス部分の修正前の角度と修正後の角度とを比較し、修正前と修正後との角度偏差が0゜±X1゜と 180゜±X1゜(X1は作業者が任意にプリセッティングする、0<X1<5)である場合、すなわち修正前のアンバランス位置を 0゜や 180゜にすると、修正後のアンバランス位置が0゜±X1゜や 180゜±X1゜になる場合には、アンバランス修正位置は正確なのでアンバランス量を補償し、修正前と修正後との角度偏差が前記0゜±X1゜と180゜±X1゜を除いて 0゜±X2゜、180゜±X2゜(X2は作業者が任意にプリセッティングする、X1< X2< 90)範囲である場合には、アンバランス修正位置(角度)を補償し、この際に修正位置はアンバランス修正量のみを補正するか、ベクター計算されたアンバランス修正位置及び修正量に応じて修正量と修正位置を同時に補正するか、修正位置を0゜と 180゜を基準で任意に移動させて補正し、この時の修正率を記録して最高の修正率を有する角度を算出してアンバランス修正位置を修正することにより、回転子のアンバランス修正誤差による不良率を大幅に減少させるとともに生産性を大幅に向上させる、バランスマシンのアンバランス修正位置及び修正量の自動補償方法を提供する。
【解決手段】回転子のアンバランスを修正するバランスマシンにおいて、アンバランスが修正された回転子のアンバランス量とアンバランス位置角度とを測定するアンバランス検査過程と、アンバランス修正前のアンバランス量が1回修正だけで可能な設定値以内にあるか否かを判断する初期アンバランス量判断過程と、前記初期アンバランス量判断過程で初期アンバランス量が設定値以内である場合、カウントを増加させるカウンティング過程と、前記カウンティング過程を経た後、アンバランス検査過程で測定されたアンバランス量が、回転子が不良か良品かを判断する値(以下、「良品値」という)よりも大きいか否かを判断する良品判断過程と、前記良品判断過程で良品値よりも大きい場合、修正前のアンバランス位置と修正後のアンバランス位置との間の角度偏差を測定する角度測定過程と、前記角度測定過程でアンバランス位置の角度偏差が0゜±X1゜と180゜±X1゜(0<X1<5)であるか、0゜±X2゜と180゜±X2゜(X1<X2<90)であるかを判断する角度偏差範囲判断過程と、前記カウンティング過程を経たカウントが平均値の算出のために、作業者の設定値になると、角度偏差が0゜+X2゜と180゜+X2゜である場合と0゜−X2゜と180゜−X2゜である場合との回数を比較し、さらに多い方に応じて誤差発生角度だけの角度を補償し、角度偏差が正確な位置で小幅の修正が行われる場合に発生する0゜±X1゜の場合と、正確な位置で大幅の修正が行われる場合に発生する180゜±X1゜の場合とを比較し、0゜±X1゜がより多い場合には修正量を増加させ、それとも180゜±X1゜がより多い場合には修正量を減少させるアンバランス修正位置及び量の補償過程と、から構成される。  (もっと読む)
(もっと読む)
測定装置のための評価及び最適化
精度及び正確度に基づいて全体の測定不確実性(TMU)を求めることによって、測定装置を評価し、最適化する方法及び関連したプログラムである。TMUは、線形回帰分析に基づいて、正味残余誤差から基準測定システムの不確実性(URMS)を除去することによって計算される。TMUは、被試験測定システムが製品の実際のばらつきを検出する能力を有するかどうかについて客観的かつより正確に表示する。 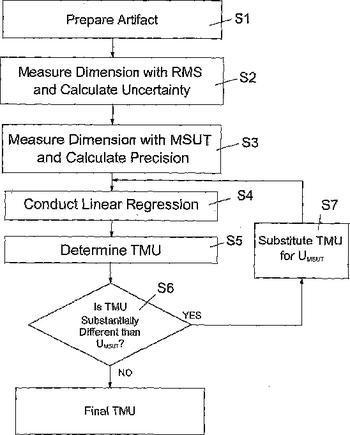 (もっと読む)
(もっと読む)
ディスプレイパネルの検査方法、検査装置および製造方法
【課題】蛍光体ペースト塗布工程直後に塗布工程の状態を検査することで塗布工程に発生した連続欠陥の原因となる不具合を迅速に発見し、不良品となりロスとなる基板数を最小限に抑え、速やかに工程を復旧させることを可能にするディスプレイパネルの検査方法および検査装置並びにそれらを用いた製造方法を提供する。
【解決手段】高さ測定手段を有し、基板に所定の間隔で複数本塗布された液状材料と交差する方向へ、基板、または高さ測定手段を移動させながら、液状材料塗布部を含む基板面の高さ測定を離散的に行い、得られた離散高さ形状信号間を補間して求められた高さ形状信号から液状材料毎の高さを抜き出して連ねた高さ信号を検査信号とし、検査信号より液状材料毎の塗布量を測定することを特徴とするディスプレイパネルの検査方法、および検査装置並びにそれらを用いた製造方法。
(もっと読む)
ねじの許容差検査のための方法およびシステム
ねじ製品を測定し、予め規定された仕様と製品との整合性を判断する方法およびシステムが提供されている。測定システムは、電気的にコンピュータベースの構成要素に結合された測定装置を含む。測定装置はねじ製品の幅の情報を検出し、検出された幅の情報に関して回転の情報と長さの情報とを検出する。コンピュータベースの構成要素は検出された情報を受信し、検出された情報と予め規定された製品の品質仕様情報とを比較し、その比較に基づいて製品が仕様情報の不確定要素の範囲内にあるかどうかを測定する。 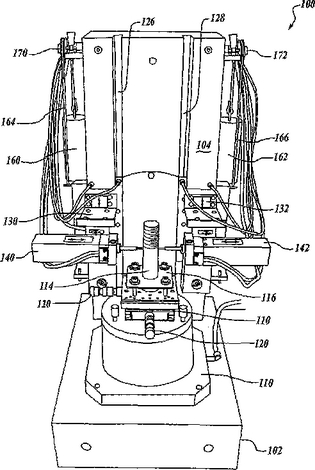 (もっと読む)
(もっと読む)
141 - 160 / 166
[ Back to top ]