
Fターム[2F069AA71]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 角度 (430)
Fターム[2F069AA71]の下位に属するFターム
Fターム[2F069AA71]に分類される特許
101 - 120 / 166
動作コースの判定
アーチファクト(10)と、装置(28)との間の動作コースを判定するためのコンピュータ実施可能な方法。該装置(28)は、少なくとも1つの直線自由度(X、Y、Z)および少なくとも1つの回転の自由度(A1、A2)において、アーチファクトと装置とが互いに関連するように動作可能なアーチファクトと相互作用する。本方法は、アーチファクト(10)を表す幾何データを受け取ることと、装置(28)を表す幾何データを受け取ることと、1つまたは複数の最適化基準に準拠するように、装置およびアーチファクトをどのようにして相互作用経路に沿って互いに対して方向付けすることができるかを、前記幾何データから決定することと、を備える。  (もっと読む)
(もっと読む)
移動体駆動方法及び移動体駆動システム、パターン形成方法及びパターン形成装置、並びにデバイス製造方法
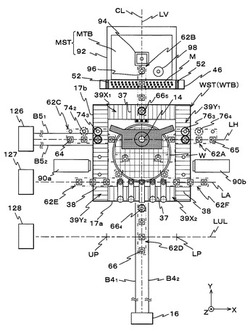
【課題】干渉計システムとエンコーダシステムを併用するハイブリッド方式のサーボ制御により、移動体を安定且つ高精度に2次元駆動する
【解決手段】干渉計システム、例えばX干渉計126とY干渉計16とを用いてステージWSTの第1の位置情報を計測する。同時に、エンコーダシステム、例えば1つのXヘッド66とYヘッド65,64とを用いてステージの第2の位置情報を計測する。第1の位置情報と第2の位置情報の差分を所定の計測時間にわたって移動平均して座標オフセットを設定し、該座標オフセットを用いてエンコーダシステムの出力信号の信頼性を検証する。正常が確認された場合に、第1の位置情報と座標オフセットとの和を使用してステージをサーボ制御する。このハイブリッド方式のサーボ制御により、干渉計の安定性とエンコーダの精密さを兼ね備えたステージの駆動制御が可能になる。
(もっと読む)
取付け角度検出装置

【課題】車載装置の取付け角度が変更された場合においても車載装置による処理の精度を維持する取付け角度検出装置を提供する。
【解決手段】取付け角度検出装置は、車載装置の加速度センサとジャイロセンサとGPS受信装置との出力を用いて車載装置の取付け角度を算出し、今回算出した取付け角度と前回算出した取付け角度とを比較して取付け角度の変更を検出し、取付け角度の変更を検出した場合に加速度センサまたはジャイロセンサの出力を補正するパラメータを求める学習機能をリセットする。
(もっと読む)
実質的に不変な回転軸を検出するための方法および装置
【課題】以前の運動予測システムの欠点を解消し、かつ実質的に不変な回転軸を有する移動体の運動を処理するために特に適している方法を提案する。
【解決手段】3本の感知軸を有する少なくとも1つの慣性または磁気センサを備えている移動体の運動の実質的に不変な回転軸を検出するための方法は、前記センサの3本の感知軸に対する、異なる時間での少なくとも3つのサンプルを含む物理測定値を得るステップE10、E31と、物理測定値空間内で、実質的に不変な回転軸を予測するステップE11−E15、E32−E34と、前記予測された軸を、運動の実質的に不変な回転軸と同定するステップとを含む。実質的に不変な軸周りで回転する移動体の運動を予測するために特に使用される。
(もっと読む)
ウェブの位置を表示するためのシステム及び方法
可撓性ウェブの変位を表示するための方法及びシステムについて記載する。細長い可撓性ウェブは、目盛り構造を有する一体的な目盛りを含み、その目盛り構造は、ウェブに向けられたエネルギーを変調するように構成される。移送構造は、ウェブと変換器との相対運動をもたらす。変換器は、目盛り構造によって変調されたエネルギーを検知し、変調されたエネルギーに基づいて連続的なウェブの変位を表示する信号を生成する。  (もっと読む)
(もっと読む)
測定装置、成型装置、転写装置および測定方法
【課題】感圧紙等のテスト部材を用いることにより、型の姿勢を従来よりも正確にしかも効率よく測定する。
【解決手段】第1の部材7の平面に対する第2の部材の平面5の傾きを測定する測定装置において、薄い板状に形成され圧力を受けたときに前記圧力の大きさに応じて色合いが変化するテスト部材であって前記各部材の各平面で押圧されて色合いが変化したテスト部材TPの色合いを画像処理することによって、前記第1の部材の平面に対する前記第2の部材の平面の傾きを算出する算出手段17を有する。
(もっと読む)
位置推定方法、位置推定システム、プログラムおよび記録媒体
【課題】使用する場所を問わず物体の位置を正確に測位する。
【解決手段】物体に装着されたセンシング装置1は、センサ10同士の通信により、他のセンシング装置1が一定距離以下に接近したことを感知する。制御部13は、物体上のセンサ10の位置を示す座標データを記憶する記憶部11から自装置のセンサ10と他のセンシング装置1のセンサ10の座標データを取得し、自装置が装着された物体の原点から見た、他のセンシング装置1が装着された物体の原点の位置を求め、物体の形状データと計算した原点の位置に基づいて、自装置が装着された物体から見た、他のセンシング装置1が装着された物体の相対的な位置と向きを計算する。
(もっと読む)
較正ユニットを使った動作追跡のためのシステムと方法
【課題】身体部分上の方位測定ユニットの方位と、関節によって相互接続された連続体を構成する身体部分同士の間の相対比率に関するデータを提供する較正段階が高精度で行われる動作追跡のためのシステムと方法を提供する。
【解決手段】個々の寸法と相互比率を有し、関節により順次相互接続される複数の物体部分で構成される物体の三次元空間内の運動を追跡するシステムが、方位パラメータを有する各物体部分と位置的及び方位的関係に配置され、物体部分の方位に関するデータを測定する方位測定ユニットと、方位測定ユニットから受け取ったデータを使って物体部分の方位及び/又は位置情報を導き出すモジュールと、受け取ったデータ、所定の制約、及び追加入力データに基づいて物体部分の相互比率と方位測定ユニットの方位パラメータを求めるために、受け取ったデータと所定の制約に基づき較正値を計算する較正ユニットとを備えるプロセッサとを備える。
(もっと読む)
自律移動体のための物体認識装置
【課題】自律移動体のための物体認識装置を提供する。
【解決手段】物体認識装置は、対象となる視野から障害物を検出し、その位置を計測する機能を有するセンサ装置および前記自律移動体の動きを制御する電子制御ユニットを備える。電子制御ユニットは、センサ装置から得られる複数の計測サイクルにわたる障害物の位置の変化に基づいて、該障害物の速度および移動方向を求める機能と、前記障害物の静止を判定する機能と、前記障害物の位置の今回計測値がそれまでに得られた前記移動方向から所定の角度を超える方向にあるとき、または前記静止を判定する機能で静止と判定されたとき、前記障害物が行動を変更したことを検出する機能と、前記障害物の行動の変更が検出されることに応じて、該行動の変更が検出された位置を起点として、新たに該障害物の速度または移動方向を算出する機能と、を実現するようプログラムされている。
(もっと読む)
センサのミスアラインメント検知および測定システム
ミスアラインメント検知センサアセンブリを提供し、これは、第1の軸に沿う検知方向を有する前方監視センサと、第1の軸と所定の関係にある第2の軸に沿う加速度を検知する慣性センサとを備えている。ミスアラインメント検知システムは、ミスアラインメント検知センサアセンブリと、信号処理システムとを用いて、第1の軸とセンサアセンブリの前方動作方向との間のミスアラインメント角度を計算する。前方監視センサアセンブリの角度ミスアラインメントを検知する方法についても開示し、本方法では、前方監視センサアセンブリの検知の軸と所定の関係を有する軸に沿う加速度を測定し、測定した加速度を所定の閾値と比較する。 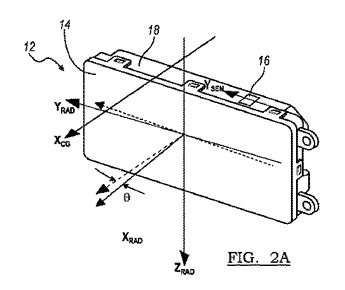 (もっと読む)
(もっと読む)
レール継目板の締結ボルト脱落検出方法および脱落検出装置
【課題】
軌道検測車がレールのカーブに入ったときでもレール継目板の締結ボルト脱落を走行状態で検出することができるレール継目板の締結ボルト脱落検出方法および装置を提供することにある。
【解決手段】
この発明は、レール継目板の静止画を撮像するカメラの視野を、軌道検測車がレールのカーブを走行するときの軌道検測車の車体の上下変動によるレール継目板の映像の移動範囲をカバーする大きさとして静止画像を得て、軌道検測車の走行方向を検出するあるいは車体の傾きを検出する検出器からの信号、例えば、通り変位器からの信号に応じてレール継目板を含むエリア画像を切出すようにしているので、切出すエリア画像の範囲を制限しても通常の走行状態において軌道検測車がカーブに入ってもレール継目板の画像を得ることができる。
(もっと読む)
三次元計測装置
【課題】構造物の全体形状と亀裂の両方をリアルタイムに計測し、且つ同一画面上に合成して表示することが可能な三次元計測装置を提供する。
【解決手段】CCDカメラ7からの画像信号からレーザ輝線の座標をリアルタイムに演算するレーザ位置検出回路11と、トンネル1にレーザスリット光又はスポット光を照射するレーザ投光器20と、このレーザ投光器20により対象物1の表面に照射された光を撮像する撮像装置30と、所定のエリアに磁界ベクトルを形成するトランスミッタ40と、CCDカメラ7により撮像された画像データをPC12が処理し易いように変換するイメージプロセッサ17と、磁気センサ4、磁気センサ8の信号から三次元位置情報及び姿勢情報を検出するまたレーザ位置検出回路11と、データに基づいて、トンネル1の三次元画像を再生するパーソナルコンピュータ(PC)12を備えて構成される。
(もっと読む)
舵角を求める方法および装置
車体(6)に可回転に支承されたステアリングホイール(58)の舵角(δLRW)を求める方法であって、ジョイント(8)を間に挟んで車体(6)に接続されたホイール(14)はステアリングホイール(58)により車体(6)に対して旋回させることができ、または旋回させられ、車体(6)は舵角(δLRW)に応じたジョイント(8)の傾斜(ω)を検出する角度測定装置を有しており、ステアリングホイール(58)の車体(6)に対する捩れ角(δSTS)が舵角センサ(61)により求められる形式の方法において、ステアリングホイール(58)によって許容されうる舵角(δLRW)の範囲に対してステアリング方向ごとに複数のセクター(S)を割り当て、前記傾斜に基づいて前記セクター(S)のうちの1つを求め、前記捩れ角(δSTS)と求められたセクター(S)とに基づいて舵角(δLRW)を求める。  (もっと読む)
(もっと読む)
ヘッドモーショントラッカ装置及びその使用方法
【課題】 交流磁気方式のHMT、光学方式のHMTにおいて測定不可のときに、移動体に設定された基準方向に対する頭部角度を算出することができるヘッドモーショントラッカ装置及びその使用方法を提供する。
【解決手段】 磁気方式又は光学方式モーショントラッカにより搭乗者の頭部角度を含む第一相対頭部情報を算出する主頭部情報算出部とを備えた移動体センサと、移動体センサに基づいて移動体の動きを表す絶対移動体情報を算出する絶対移動体情報算出部と、頭部センサと、頭部センサの出力信号に基づいて移動体と頭部との動きとを合成した絶対頭部情報を算出する絶対頭部情報算出部と、絶対移動体情報と絶対頭部情報とに基づいて第二相対頭部情報を算出する副頭部情報算出部と、主頭部情報算出部による第一相対頭部情報の算出が不適当な領域において副頭部情報算出部により第二相対頭部情報を算出する切替部とを備える。
(もっと読む)
バッチリアクター内の基板ホルダのアライメントを決定するためのセンシングシステム及び方法
【課題】均一なガスフローパターンにより均一な堆積フィルムを生じる半導体処理システムを提供する。
【解決手段】 半導体基板を処理するために、リモートコントロールされ、基板ホルダのスロット内に挿入されたセンサシステム100が、リアクター等のバッチリアクター内において、ウェハボート等の基板ホルダのアライメントを測定するために用いられる。センサシステム100は、コントローラと通信するためのトランシーバと、プロセスチャンバ外部のデータ収集ユニットとを備える。さらに、センサシステム100は、センサからプロセスチャンバの壁まで距離を測定するための距離センサ120を備える。センサは、プロセスチャンバの周囲360°に渡る範囲の測定を得るために回転される。プロセスチャンバ内の基板ホルダのアライメントは、回転角と、測定された距離又は距離センサ120によって受信された信号との関係に基づいて決定される。
(もっと読む)
オートバイのロール角を決定する装置及び方法
路上でカーブするとき、オートバイ1のロール角を決定する装置である。該装置は、ロールレート信号を供給する第1ジャイロセンサ11と、ヨーレート信号を供給する第2ジャイロセンサ12と、速度センサ36とを含む。該装置は、第1中間ロール角の値を得るため、ロールレート信号を積分し、ヨーレートと乗り物の速度とから、第2中間ロール角の値を決定するように構成される。カーブするときにオートバイ1がロールする際、ビームパターンが水平レベルを維持するように、ヘッドランプの向きを調整するため、前記装置は、2つの中間ロール角の値を組合せて、サーボ50により使用され得るロール角の出力値にする。  (もっと読む)
(もっと読む)
モーションキャプチャー装置およびそれに係る方法
本発明はN個の関節化されたセグメントで構成されるある構造体の運動を捕捉するための装置に関し、以下の特徴的構成を有する。
− 連続的に時間tkにおいて、基準を形成するある基準座標系におけるランク
少なくとも出力する第一の手段(ML)、ここで、kは1か、または1より大きい整数である、そして、
− 様々なセグメントにわたって分布し、ランク1からランクnの各セグメン
本発明は生体力学の解析、遠隔操作、ある人物のアニメーション等に応用される。
(もっと読む)
空間内の対象物の位置を測定かつ/または較正するための方法および装置
本発明は、空間内の対象物の位置を測定かつ/または較正する方法およびそのための装置に関し、そのような実施形態においては、装置は、一端においてフレームに嵌合され、他端においてプラットフォームに嵌合された、少なくとも1つの移動アームを含み、プラットフォームは、測定または較正される対象物に取り付けられることができ、プラットフォームを取り付けられた対象物が動いている間に、少なくとも1つの移動アームの個々の部材、フレームおよびプラットフォームの相対的な位置が読み取られ、測定されたデータは、対象物の位置を決定するために、または対象物を較正するために使用される。測定および/または較正装置のプラットフォームを測定または較正対象物に取り付けると直ちに、これらの接合された部分は、対象物の駆動装置によって起動され、対象物の作動空間の範囲内で任意の動きを行い、その一方で、装置の個々の部材の相対的な位置に対応する量が収集され、空間内の対象物の位置の決定または較正のために使用される。測定または較正対象物を有するプラットフォームが動いている間に測定された量の数は、装置の自由度の数より少なくとも1大きい。 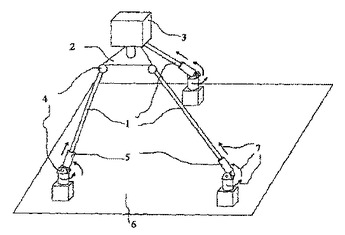 (もっと読む)
(もっと読む)
搬送コンベアの保守検査装置および保守検査方法
【課題】搬送コンベアの不具合箇所を早期に発見し、故障予兆診断を可能とする搬送コンベアの保守検査装置および保守検査方法を提供する。
【解決手段】搬送レール91に沿ってワークを搬送する搬送コンベアの保守検査装置であって、搬送コンベアに取り付けられ、搬送レール91の断面形状の所定部位の形状変化を検出する形状変化検出手段2と、搬送レール91の搬送方向における形状変化検出手段2の位置を検出する位置検出手段3と、位置検出手段3のデータに基づいて、搬送コンベアの軌道形状を求めるとともに、形状変化検出手段2および位置検出手段3で検出されたデータに基づいて、搬送コンベアの軌道における形状変化の分布を求める演算装置と、を備えたことを特徴とする搬送コンベアの保守検査装置。
(もっと読む)
リソグラフィ装置およびデバイス製造方法
【課題】変位測定系を用いて基板テーブルの位置を高精度に測定する。
【解決手段】変位測定系1は、第1の方向における基板テーブル2の位置を測定するように構成された第1のxセンサ4と、第2の方向における基板テーブル2の位置を測定するように構成された第2のyセンサ6とを備える。変位測定系は、さらに第2のxセンサ5を備える。第1および第2のxセンサ4、5と第1および第2のyセンサ6、7は、少なくとも一つの格子プレート3に対するセンサそれぞれの位置を測定するように構成される。変位測定系1は、基板テーブル2の位置に応じて第1および第2のxセンサ4、5と第1および第2のyセンサ6、7を選択的に使用して、三自由度で基板テーブル2の位置を決定するように構成される。
(もっと読む)
101 - 120 / 166
[ Back to top ]