
Fターム[2F069AA71]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 角度 (430)
Fターム[2F069AA71]の下位に属するFターム
Fターム[2F069AA71]に分類される特許
21 - 40 / 166
画像プローブの校正方法とタッチプローブ
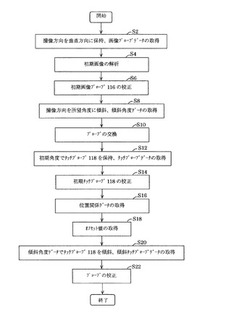
【課題】簡易的な構成で画像プローブの校正を高精度に行いながら画像プローブによる被測定物の対象拡大と画像プローブの使い勝手の向上が可能となる。
【解決手段】撮像方向(光軸Dの方向)を垂直方向に保持し画像プローブデータを取得する工程(ステップS2)と、撮像方向を所望角度に傾斜させ傾斜角度データを取得する工程(ステップS8)と、プローブ交換工程(ステップS10)と、撮像方向を垂直方向に保持した際の初期角度でタッチプローブ118を保持しタッチプローブデータを取得する工程(ステップS12)及び位置関係データを取得する工程(ステップS16)と、傾斜角度データでタッチプローブ118を傾斜させ傾斜タッチプローブデータを取得する工程(ステップS20)と、画像プローブデータ等に基づいて、所望角度への傾斜後の画像プローブ116の焦点位置及び光軸D周りの回転角を校正する工程(ステップS22)と、を含む。
(もっと読む)
鉄道車両アタック角測定装置および方法

【課題】軌間外の建築限界を支障しない箇所に1つのセンサを設置するだけで車輪のレールに対するアタック角を測定することができ、複数のセンサを用いることや、高い精度でのゼロ点調整が不要な、鉄道車両アタック角測定装置および方法を提供する。
【解決手段】レールを走行する鉄道車両の車輪Wが通過する位置が測定範囲となるように設置され、測定点を通過する前記車輪Wまでの距離を連続的に測定するセンサ部12と、前記センサ部12による測定結果を受信して解析する処理部14と、を有し、前記処理部14は、前記センサ部12の測定結果から、前記車両の走行速度と、所定時間における車輪Wまでの距離の変化量を算出し、前記走行速度に前記所定時間を乗じた値と、前記所定時間における車輪Wまでの距離の変化量とから、その車輪の前記レールに対するアタック角を算出する。
(もっと読む)
鉄道車両の車輪角度測定方法及び車輪角度測定装置
【課題】簡素な構成によってレールに対する車輪の相対角度を検出可能でありかつ汎用性が高い鉄道車両の車輪角度測定方法等を提供する。
【解決手段】車軸20の両端部に固定された一対の車輪10を有し、車輪とレールRi,Roとの接触部に作用する荷重に応じた出力を間欠的に発生する荷重検出手段Bpを備えた荷重測定用輪軸1を用いた鉄道車両の車輪角度測定方法を、荷重測定用輪軸が装着された車両を走行させながら荷重測定用輪軸の回転角度位置を逐次検出し、荷重検出手段の出力がピークを示す回転角度位置の変化に基づいて車輪のレールとの接触点の車輪周方向移動量を求め、接触点の車輪周方向移動量に基づいて車輪のレールに対する相対角度を求める構成とする。
(もっと読む)
ウエハ平坦度測定法
【課題】ウエハの平坦度検査を高精度かつスループットの高い方法で実現する。
【解決手段】回転運動および直線運動機構の運動誤差を補正することの可能な3点法を、ウエハ101と検出器9の相対的な回転運動によるウエハ外周の形状測定と、ウエハ101と検出器9の相対的な直線運動によるウエハ直径方向の形状測定に適用し、両者の組み合わせによりウエハ全体の形状を測定できるようにした。
(もっと読む)
表面性状測定機の直角度誤差算出方法および校正用治具
【課題】簡易でかつ安価な校正用治具を用いて直角度誤差を簡易にかつ高精度に算出可能な表面性状測定機の直角度誤差算出方法および校正用治具を提供する。
【解決手段】3つの基準球62A〜62Cを校正プレート61に直角に配置した校正用治具60を、テーブル16上に配置し、接触式検出器20によって3つの基準球の中心座標を求め(第1測定工程)たのち、これら中心座標を結ぶ2つの直線の交差角度θ1を算出する(第1角度算出工程)。次に、校正用治具を、同一面内で90度回転させてテーブル上に配置し、接触式検出器によって3つの基準球の中心座標を求め(第2測定工程)たのち、これら中心座標を結ぶ2つの直線の交差角度θ2を算出する(第2角度算出工程)。最後に、交差角度θ1,θ2とからY軸駆動機構17の移動方向とX軸駆動機構48の移動方向との直角度誤差を算出する(直角度誤差算出工程)。
(もっと読む)
被加工物の真直度校正方法
【課題】 表面形状測定装置を介して工作機械のワークテーブル上の加工ワークの真直度を測定し、その測定された真直度の値を校正する方法の提供。
【解決手段】 一対の平面鏡(M1,M2)を距離d離して両端に設けた姿勢表示物体2を1個、変位センサ4を用い、長尺の被測定物(加工ワーク)wを距離dずつ移動さして変位センサ4により被測定物の真直度を測定し、この測定値に含まれる装置の運動誤差誤差を差し引く校正を行うので、短い姿勢表示物体2を用いて長い被測定物の真直度を校正することができる。
(もっと読む)
平衡度測定装置及び平衡度測定方法
【課題】工具の平衡度を、該工具の先端の形状や温度等に依存せず、短時間で精度良く測定することができる平衡度測定装置及び平衡度測定方法を提供する。
【解決手段】工具Tが離間可能に当接される測定面11を設けた測定部10と、測定部10の測定面11に対向した付勢面11bに当接し、測定部10を付勢する付勢部21と、測定部10の付勢面11bに当接した状態で設けられ、工具Tに当接された測定部10が付勢されている方向と反対の方向に移動した場合に、測定部10の位置を検出する検出部31と、測定部10の測定面11の側に設けられ、付勢部21に付勢された測定部10を離間可能に係留して停止させる係留部40と、検出部31と電気的に接続され、検出部31が検出した測定部10の位置の変化量又は位置の絶対値を報知する報知部とを有する。
(もっと読む)
三次元形状測定装置
【課題】測定物の上面も側面も10〜100ナノメートルの超高精度で走査測定できる三次元形状測定装置を提供する。
【解決手段】上面スタイラス1aは、エアスライド1cによりXY方向には振れずに測定物の上面を走査測定でき、第1のミラー1bとレンズ2deによりZ座標も精度良く測定でき、側面スタイラス2iaは、XY方向にのみ変位可能でZ方向には振れないので測定物の側面を走査測定でき、側面スタイラス2iaのZ座標測定は前記第1のミラー1bのZ座標測定値を利用して、より高精度に側面スタイラスのXY変位を傾斜角度測定部2jで測定することができる。
(もっと読む)
球体移動経路の測定方法
【課題】球体の実際の移動状態に近いデータを獲得可能な球体移動経路の測定方法を提供する。
【解決手段】操作ユニットおよび三軸加速度計Cを用意し、三軸加速度計Cと操作ユニットとを接続させ、三軸加速度計Cで測定したデータを操作ユニットに伝送し、測定対象物Oの内部に三軸加速度計Cを置き、三軸加速度計CでXYZ三軸の空間座標を定義し、第一測定時点に三軸の初期位置を確認し、第二測定時点に比較位置を確認し、データを操作ユニットに伝送する。XYZ三軸のそれぞれの比較位置と初期位置との間の角度を比較し、XYZ三軸の軸方向上の力を受けた後の加速度データと、それぞれ軸方向の分力のベクトルと、それぞれ軸に対する旋転力とを算出する。三つの軸方向の加速度値と、測定対象物Oの重量およびサイズとに基づいて、測定対象物Oの初期速度、飛行時間、飛行高度、飛行距離および旋転速度のうちの少なくとも一つのデータを求める。
(もっと読む)
港湾構造物計測装置
【課題】水中部分と水上部分、及び両者の境界部分も連続的に測定できる港湾構造物計測装置を提供する。
【解決手段】陸上に設置されたGPS基準局11と、測定機器を搭載した曳航体12と、曳航体を測定水域に沿って曳航する曳航船13とから成り、GPS基準局は、衛星S1〜S3からの電波を受信するGPS受信機14とデータリンク装置15を備え、曳航体は、GPSアンテナと、モーションセンサーと、マルチビーム測探機ソナーヘッドと、レーザースキャナーとを搭載し、曳航船は、マルチビーム測探機プロセッサーと、データリンク装置との間で位置情報を授受するインターフェイスボックスと、インターフェイスボックス及びマルチビーム測探機プロセッサーと接続されたデータ収録装置と、レーザースキャナー及びインターフェイスボックスと接続された第2データ収録装置とを備え、水中部分と水上部分と共に、境界部分も連続的に測定する。
(もっと読む)
外骨格を有するCMMアーム
【課題】外骨格および伝達手段を有するCMMアームを提供する
【解決手段】 ベース端及びプローブ端を有する内部CMMアームと、複数の伝達手段を介して内部CMMアームを駆動する外骨格とを備える、外骨格を有するCMMアームの装置が提供される。1つ又は複数の接触プローブ、光学プローブ、及び工具が、プローブ端に取り付けられる。外骨格を有するCMMアームは、手動操作可能な実施形態及び自動実施形態で提供される。外骨格を有するCMMアームは、高精度測定のため、又は高精度動作を行うために動作可能である。外骨格を有するCMMアームの動作の方法が提供される。
(もっと読む)
点群データ処理装置、点群データ処理システム、点群データ処理方法、および点群データ処理プログラム
【課題】測定対象物の点群データからその特徴を抽出し、対象物の輪郭に係るデータを自動的かつ短時間に生成する技術を提供する。
【解決手段】測定対象物の二次画像と、この二次元画像を構成する複数の点の三次元座標データとを関連付けた点群データの中から、演算の負担の大きい非面領域に係る点群データ除去する非面領域除去部101と、非面領域のデータが除去された後の点群データに対して、面を指定するラベルを付与する面ラベリング部102と、ラベルが付与された面から連続した局所領域に基づく局所平面を利用して、対象物の輪郭線を算出する輪郭線算出部103と、精度を高めるために点群データの再取得の要求を行う点群データ再取得要求処理部106を備えている。
(もっと読む)
産業機械
【課題】使用する環境の温度変化や、経時変化などの影響があっても適切に空間精度補正をすることができる産業機械の提供。
【解決手段】産業機械としての三次元測定機1は、ガイド部212と、コラム221とで構成され、Y軸方向に沿って移動する移動機構と、コラム221の角度を検出する2軸角度計32と、移動機構を制御する制御装置4とを備える。制御装置4は、角度誤差取得部42と、パラメータ生成部43と、補正部44とを備える。角度誤差取得部42は、コラム221を移動させたときに2軸角度計32にて検出される角度に基づいて、コラム221の位置に対するコラム221の角度誤差を取得する。パラメータ生成部43は、角度誤差取得部42にて取得されるコラム221の角度誤差をコラム221の位置で積分することで真直度補正パラメータを生成する。補正部44は、パラメータ生成部43にて生成される真直度補正パラメータに基づいて、移動機構の運動誤差を補正する。
(もっと読む)
校正用冶具、校正方法、及び該校正用冶具が搭載可能な形状測定装置
【課題】レンズの偏心を測定できる形状測定装置を簡易的に、かつ高精度に校正できる校正用冶具、校正方法、及び該校正用冶具が搭載可能な形状測定装置を提供する。
【解決手段】校正用冶具100は、中心が円周上を3等分し、計測用基準球を接するように設置できる3個の基準球2を備える。形状測定装置は、該校正用冶具を配置可能であり、被測定物の形状に関する情報を取得するための第1プローブと、校正用冶具に対して第1プローブと反対側に設けられ被測定物の形状に関する情報を取得するための第2プローブと、第1プローブ及び第2プローブにより、配置された計測用基準球を測定して第1測定結果及び第2測定結果を求める測定部と、第1測定結果及び第2測定結果を比較してシフトを算出するシフト量算出部と、を備える。校正方法は、上記形状測定装置を用いた測定ステップとシフト量等を算出するシフト量算出ステップとを備える。
(もっと読む)
外付け式デジタル角度測定装置
【課題】外付け式デジタル角度測定装置の提供。
【解決手段】この外付け式デジタル角度測定装置は、手動工具に結合され、該手動工具は駆動ロッドと、該駆動ロッドの一端に設けられた駆動ヘッドと、該駆動ヘッドの一側に設けられてネジ締めを行うスリーブコネクタを有する。該外付け式デジタル角度測定装置はケース、表示装置、角度検出システムと結合部を包含する。該ケースは該結合部により着脱自在に該駆動ヘッド或いは該駆動ロッド或いは該スリーブコネクタ、或いは手動工具の、該外付け式デジタル角度測定装置を固定できる任意の位置に取付けられ、並びに該表示装置と該角度検出システムが該ケースに設置される。該結合部により本発明が異なる手動工具に取付け可能とされ、これにより該角度検出システムがさらに正確に誤差なく該手動工具が駆動するネジの回転角度を検出計算し、並びに該表示装置に表示させることができる。
(もっと読む)
軌道解析装置、軌道解析方法
【課題】微小な動きから、大きな動きまで正確に検出可能とする軌道解析装置および軌道解析方法を提供する。
【解決手段】物体に固定され、角速度センサーと、少なくとも2個の加速度センサーと、を備える慣性センサーを備える姿勢検出部と、検出データを増幅しA/D変換するデータI/F部と、データを処理する演算部と、演算結果に基づき、前記加速度センサーのどちらか一方の加速度センサーを選択するセンサー制御部と、選択された前記加速度センサーを含む前記慣性センサーからの出力データから姿勢データを生成し、送出する姿勢データ生成部と、を備える姿勢検出装置と、前記姿勢検出装置からの前記姿勢データを解析する解析部と、前記姿勢データおよび解析結果を保存する保存部と、前記解析結果を通知する通知部と、を備える解析装置と、前記姿勢検出装置と前記解析装置との通信手段と、を含む軌道解析装置。
(もっと読む)
測定システム
【課題】高速で、振動と測定誤差の少ない座標測定システムを提供する。
【解決手段】座標測定システムの可動サポートに着脱可能に接続されるコネクタを備えるアナログ走査プローブ120であり、走査プローブは、測定軸63に従って当該走査プローブに回動可能に接続される針部28の先端の接触部30と、前記測定軸63についての前記接触部30の傾き角の測定を行う位置エンコーダと、を含み、前記コネクタと前記測定軸63との間に走査プローブ又はプローブの一部を傾けてプローブの走査を可能とする1つの関節64が備えられる。
(もっと読む)
孔傾斜計測治具及び孔傾斜計測方法
【課題】計測対象孔の傾斜状態を計測する場合に、計測対象孔の加工作業の効率低下を防止すると共に、計測対象孔の細径化にも対応することが可能な孔傾斜計測治具を提供する。
【解決手段】孔傾斜計測治具の構成として、平面に形成された計測対象孔に挿入自在な棒状部材と、該棒状部材の中心軸線に直交するように当該棒状部材に設けられた直交部材と、該直交部材において前記中心軸線から離間した位置に設けられた光反射部材とを具備するという構成を採用する。
(もっと読む)
物体に対するプローブの姿勢を、該プローブを用いて該物体をプロービングすることによって求めるための方法およびシステム
【課題】物体に対するプローブの姿勢を、プローブを用いて物体をプロービングすることによって求めるためのシステム及び方法を提供する。
【解決手段】ラオ・ブラックウェル化パーティクルフィルタリングを使用して姿勢の確率を求めるステップであって、姿勢のロケーションの確率が前記パーティクルのロケーション212によって表され、姿勢の配向の確率が、各パーティクルのロケーションを条件とするパーティクルの配向にわたるガウス分布215によって表され、姿勢の確率が特定の姿勢の周りに集中するまで、後続のプロービングごとに実行されるステップと、特定の姿勢に基づいて物体に対するプローブの姿勢を推定するステップとを含む。
(もっと読む)
操舵角検出装置および操舵角検出方法
【課題】測定作業の容易化およびコストダウンを図る上で有利な操舵角検出装置および操舵角検出方法を提供する。
【解決手段】ステアリングホイール2の形状部2Dの外周に沿って傾斜面12Aと起立面12Bとを備える複数の検出用突起12が設けられている。操舵角検出装置10は、傾斜面12Aの回転軸の半径方向における変位量dを検出し、操舵角θと変位量dとを対応付けたデータテーブルから操舵角θを特定し該操舵角θを示す操舵角データを出力し、操舵角θの特定は、検出された変位量dと、直近の操舵角θ0とに基づいて行う。
(もっと読む)
21 - 40 / 166
[ Back to top ]