
Fターム[2F069AA71]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 角度 (430)
Fターム[2F069AA71]の下位に属するFターム
Fターム[2F069AA71]に分類される特許
41 - 60 / 166
測定方法及び形状測定装置
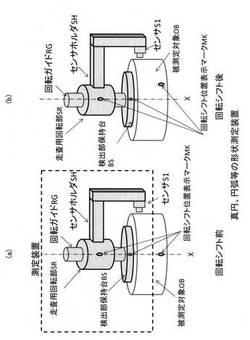
【課題】センサ1本だけを用いた繰返し走査型の2点法で高い測定精度を実現する新しい測定方法及び形状測定装置を提供する。
【解決手段】回転ガイドRGの周囲を走査用回転部SRを相対回転させ、それと共にセンサS1が被測定対象OBの周囲を回転し外周の凹凸を検出するので、変位センサS1の出力が不図示のエンコーダの信号に同期して出力される。回転軸線Xの交差位置を変えずに被測定対象OBと検出部保持台BSとを走査方向に所定の角度だけ回転変位させる。回転ガイドRGの周囲を、走査用回転部SRを相対回転させるとそれと共にセンサS1が被測定対象OBの周囲を回転し、その出力を取得することで(4)ー(6)式が求められ被測定対象OBの形状だけを求める差分が得られる。
m1(θ)=f(θ)+ex(θ)(4)、m2(θ)=f(θ+φ)+ex(θ)(5)、m2(θ)−m1(θ)=f(θ+φ)−f(θ)(6)
(もっと読む)
自己位置推定装置および自己位置推定方法

【課題】高サンプリング周期で、高精度に自己位置を推定することが可能な自己位置推定装置を提供する。
【解決手段】本発明の自己位置推定装置は、移動機構を備え、所定の空間を移動可能な自律移動装置の移動機構による動作情報を検出する内界センサ、および所定の空間内に関する空間情報を検出する外界センサによる検出結果に基づいて、第1のサンプリング周期で自己位置を推定する第1の自己位置推定部と、第1の自己位置推定部による自己位置推定結果と、内界センサにより検出された自律移動装置の動作情報とに基づいて、第1のサンプリング周期よりも高いサンプリング周期で自己位置を推定する第2の自己位置推定部と、を備える。
(もっと読む)
座標位置決め装置を用いて得られる測定値の誤差の補正
測定プローブ(18)を有する座標位置決め装置を操作する方法が記載される。方法は、一連の公称同一の部品の内の第一の部品(24)を選択する工程であって、少なくとも、第一の部品(24)の一つ以上の構造と関連する第一の基準幾何学的特性は知られている工程を含む。また、第一の部品(24)の一つ以上の構造を測定するために、座標位置決め装置を用い、そこから、第一の基準幾何学的特性に対応する、第一の測定幾何学的特性を決定する工程が実行される。それから、第一の基準幾何学的特性と第一測定幾何学的特性との間の差異を記述する、第一の特性補正値が決定される。座標位置決め装置は、それから、一連の公称同一の部品の内の一つ以上の他の部品の一つ以上の構造を測定するために用いられ、各々の他の部品に対して、第一の基準幾何学的特性に対応する、他の測定幾何学的特性が決定される。それから、第一の特性補正値が、各々の他の測定幾何学的特性に適用される。対応する座標位置決め装置が、また、記載される。 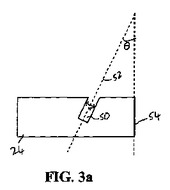 (もっと読む)
(もっと読む)
校正装置及び測定装置
【課題】角度2点法プローブのゼロ点校正を角度2点法の環境に対するロバスト性を維持しながら、迅速に、精度よく、かつ簡便に実現できる校正装置及び真直形状測定装置を提供する。
【解決手段】校正対象となる2つの角度センサSS1〜SS2を円板CP1〜CP2に対して相対的に固定し、回転角θ=0度において2つの多面鏡CP1〜CP2の傾斜角を、各角度センサセンサSS1〜SS2を用いて測定して第1の測定値を求め、且つ回転角θ=180度において2つの多面鏡CP1〜CP2の傾斜角を、角度センサセンサSS1〜SS2を用いて測定して第2の測定値を求め、第1の測定値と第2の測定値とに基づいて、前記角度センサのゼロ点誤差を校正できる
(もっと読む)
形状推定システム、角度推定方法及び対象物数推定方法
【課題】2次元平面上の対象物の形状の外周を構成する線分がなす内角を推定する。
【解決手段】複合センサノードは、予め定められた形状をなすように配備され、センシングエリア内における形状推定対象物の有無を検出する複数のセンサと、センサのそれぞれが検出した形状推定対象物の有無を示す検出結果情報をサーバに送信する送信手段とを備え、サーバは、形状推定対象物の頂点の内角がαの場合に、複合センサノードのうち、特定の複合センサノードが形状推定対象物を検出し、その他が検出しないセンシング結果となる複合センサノードの集合の測度を、複合センサノードのパラメータとαから計算する測度計算手段と、測度から内角α1,・・・,αn(nは内角の数)である場合のセンシング結果の期待値を計算する期待値計算手段と、センシング結果と期待値の差分を小さくする内角α1,・・・,αnを探索する探索手段とを備える。
(もっと読む)
慣性測定法による軌道検測装置の低速時精度補償方法及びその装置
【課題】 軌道検測車の低速走行時における慣性測定法の精度低下を補償し、測定下限速度を引き下げることができる慣性測定法による軌道検測装置の低速時精度補償方法及びその装置を提供する。
【解決手段】 慣性測定法による軌道検測の低速時精度補償装置において、慣性測定で得られる加速度・角度・変位の信号を位相補償・波形変換器6で得て、軌道検測車1の低速時には位相補償・波形変換器6から分岐して低速時精度補償部8によって演算し、軌道検測車1の低速時における出力として軌道狂いを計測する。
(もっと読む)
移動情報検出方法、移動情報検出プログラム、計測装置、光学系、露光装置及びデバイスの製造方法
【課題】位置センサを用いた移動部材の移動情報の検出精度を向上させることができる移動情報検出方法、移動情報検出プログラム、計測装置、光学系、露光装置及びデバイスの製造方法を提供する。
【解決手段】ステップS11では、レンズをZ軸方向及びθx方向に移動させると共に、複数の位置で位置センサを用いてレンズのY軸移動量dを検出させ、さらに、Y軸移動量dを検出したときのレンズのZ軸方向に関する位置及び傾斜角を検出させる。そして、ステップS12,13では、位置センサのスケールの傾き角度θを算出させる。その後、算出した傾き角度θに基づいて、位置センサを用いてレンズのY軸移動量dが補正される。
(もっと読む)
可搬型の関節アーム座標測定機の移動を改善するための傾斜計の使用
第1の位置から第2の位置に可搬型の関節アーム座標測定機(AACMM)を移動する方法において、AACMMは、第1の位置で第1の原点および第1の基準系を有し、第2の位置で第2の原点および第2の基準系を有する、方法であって、可搬型のAACMMが第1の位置および第2の位置のそれぞれにあるようにして、重力ベクトルに対して各方向がほぼ直交する2つの直交方向に沿った可搬型のAACMMの傾斜の量を測定するステップと、可搬型のAACMMが第1の位置にあるようにして第1の目標および第2の目標を測定して、第1の基準系においてx、y、およびz座標の第1の組ならびにx、y、およびz座標の第2の組を取得するステップと、可搬型のAACMMが第2の位置にあるようにして第1の目標および第2の目標を測定して、第2の基準系においてx、y、およびz座標の第3の組ならびにx、y、およびz座標の第4の組を取得するステップと、第1の基準系に対する第2の原点のx、y、およびz座標を発見するステップであって、第2の原点のx、y、およびz座標は、x、y、およびz座標の第1、第2、第3、および第4の組を使用するが、第1の位置および第2の位置でAACMMによって測定された第3の目標のさらなるx、y、およびz座標は使用せずに発見される、ステップとを含む方法。  (もっと読む)
(もっと読む)
マルチバスアーム技術を用いた可搬型の関節アーム座標測定機
手動で位置付けることが可能な関節アーム部と、測定デバイスと、電子回路とを含む、マルチバスアーム技術を用いた可搬型の関節アーム座標測定機(AACMM)。電子回路は、アーム部からの位置信号を受信し、測定デバイスの位置に対応するデータを提供するように構成される。AACMMは、プローブ端と、アクセサリデバイスと、エンコーダデータバスと、第1のデバイスデータバスとをさらに含む。エンコーダデータバスは、アーム部および電子回路に結合され、エンコーダデータバスは、電子回路に位置信号を送信するように構成される。第1のデバイスデータバスは、アクセサリデバイスおよび電子回路に結合される。第1のデバイスデータバスは、アクセサリデバイスから電子回路にアクセサリデバイスデータを送信するために、エンコーダデータバスと同時に、エンコーダデータバスとは独立して動作するように構成される。 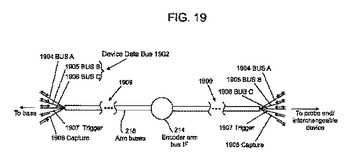 (もっと読む)
(もっと読む)
傾斜計を用いて関節アーム座標測定機の取り付けの安定性を評価するための方法
可搬型の関節アーム座標測定機が、基部と、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含む、アーム部と、トランスデューサからの位置信号を受信する電子回路と、基部に結合された第1の傾斜計であって、基部の傾斜の角度に応じた第1の電気信号を生成するように構成された、第1の傾斜計と、第1の傾斜計の第1の読み取り値および第1の傾斜計の第2の読み取り値を記録するように構成された電気的システムであって、第1の読み取り値が、基部に加えられた第1の力および取り付け構造に加えられた第3の力のうちの少なくとも1つに応じたものであり、第2の読み取り値が、基部に加えられた第2の力および取り付け構造に加えられた第4の力のうちの少なくとも1つに応じたものである、電気的システムとを含む。 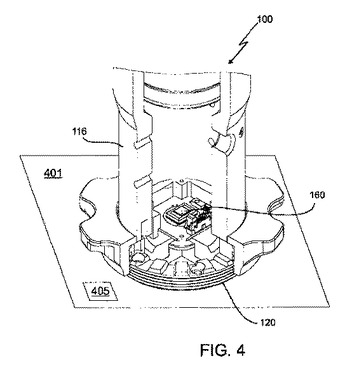 (もっと読む)
(もっと読む)
可搬型の関節アーム座標測定機および統合された環境レコーダ
手動で位置付けることが可能な関節アームと、AACMMの第1の端部に装着された測定デバイスと、位置信号を受信するための、および測定デバイスの位置に対応するデータを提供するための電子回路とを含む可搬型の関節アーム座標測定機(AACMM)。AACMMは、環境レコーダをさらに含む。環境レコーダは、パラメータの値を出力するためのセンサと、メモリと、方法を実施するために環境レコーダによって実行可能な論理とを含む。方法は、パラメータの値を監視するステップと、パラメータの値がプログラム可能な閾値の外にあることを判定するステップとを含む。パラメータの値およびタイムスタンプが、パラメータの値がプログラム可能な閾値の外にあると判定されることに応答してメモリに記憶される。メモリの内容が、電子回路に送信される。  (もっと読む)
(もっと読む)
非接触型位置・姿勢測定方法及び非接触型位置・姿勢測定装置並びにこれを備えた半導体実装装置
【課題】測定対象物の位置・姿勢を直接測定して、精度の高い位置・姿勢の測定及び制御を可能にするとともに、測定対象物の位置・姿勢を非接触で測定することでモデル化を簡略にし、モデル化に起因した誤差を小さくすることを可能にした非接触型位置・姿勢測定方法及び非接触型位置・姿勢測定装置並びにこれを備えた半導体実装装置を提供する。
【解決手段】エンコーダ10の位置検出器15と距離計16、17が取り付けられた測定装置2と、測定対象物9に取り付けられたエンコーダ10のスケール11とを備えてなる非接触型位置・姿勢測定装置Bを用い、距離計16、17によって位置検出器15とスケール11の間隔及び平行度を測定し、間隔と平行度が一定となるように測定装置2のマニピュレータ13を制御し、測定装置2の位置情報と距離計16、17の計測値とエンコーダ10の計測値とを用いて測定対象物9の位置と姿勢を測定する。
(もっと読む)
改良された関節式アーム
関節式アームCMMは、複数の伝達部材と、少なくとも2つの伝達部材を互いに接続する複数の関節部材と、遠端における座標取得部材と、近端におけるベースとを備える。関節部材の少なくとも2つは、少なくとも1つのエンコーダを備えることが可能であり、少なくとも2つのエンコーダは、ともに、単一のモノブロックハウジング内に収容されることが可能である。 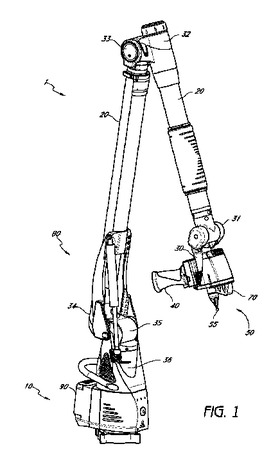 (もっと読む)
(もっと読む)
関節角度計測装置
【課題】従来の関節角度計測装置は、ビデオカメラによって被験者を撮影するスペースや、画像解析を行うコンピュータ等が必要となるので、設備が大がかりなものとなり、製品コストが増大している。
【解決手段】本発明による関節角度計測装置は、例えば上腕及び前腕や腰及び上腿等の関節を挟む第1及び第2部位に第1及び第2慣性センサ1,2が取付けられ、信号処理器3の信号回路34がcos−1(X1・X2+Y1・Y2+Z1・Z2)の演算を行うことで関節の曲げ角度φを算出する構成である。
(もっと読む)
ホーミング処理のためのガントリーステージ直交性誤差測定方法および誤差補正方法
【課題】本発明の課題は、ガントリーステージ直交性誤差に関連する問題を解決することである。
【解決手段】本発明によるホーミング処理のためのガントリーステージ直交性誤差測定方法および誤差補正方法は、直交性に構造的に一致するガントリーステージの現在位置のエンコーダ値を解読して記憶する工程と、ガントリーステージを低速で駆動している状態で、ガントリーステージのマスター軸およびスレーブ軸上にそれぞれ設定されたホーミング処理用のセンサまたはエンコーダのインデックス信号をモニタする工程と、インデックス信号が検出された場合、認知された位置のマスター軸またはスレーブ軸のリニアエンコーダ値を解読する工程とを備えていることを特徴とする。
(もっと読む)
機械の誤差同定方法およびプログラム
【課題】2つ以上の並進軸と1つ以上の回転軸を有する機械において、回転軸に関する幾何誤差と並進軸に関する幾何誤差とをほぼ同時に同定する。
【解決手段】回転軸であるC軸等を複数角度に割り出してターゲット球12を複数箇所に位置決めし、位置計測センサによりターゲット球12の3次元空間上の中心位置を計測し、計測された複数の中心位置計測値を円弧近似し、近似された円弧の1次もしくは2次成分等からC軸等の中心位置の誤差および傾き誤差並びに並進軸であるX軸,Y軸等の傾き誤差を算出する。
(もっと読む)
地図画像統合データベース生成システム及び地図画像統合データベース生成プログラム
【課題】移動体に固定された軸を使用せず、任意の方向にある撮影対象物の位置を取得することができる撮影対象位置特定装置、地図画像統合データベース生成装置及び撮影対象位置特定プログラムを提供する。
【解決手段】撮影装置10が撮影対象を撮影すると、制御装置16は、この画像情報とともに、撮影装置10のシャッターに同期あるいは非同期で角度距離計測器12が計測した撮影装置10の撮影位置と撮影対象との距離データと撮影装置10の撮影方向の方位角及び仰俯角を取得する。また、上記シャッターに同期あるいは非同期で、座標計測装置14から撮影装置10の撮影位置の座標情報を取得する。次に、制御装置16は、上記取得した、距離データ、方位角及び仰俯角のデータ及び座標情報のデータに基づいて、撮影対象の座標情報を演算する。また、撮影対象の画像情報及びその座標情報は、互いに関連付けて出力する。
(もっと読む)
車両位置演算装置及び車両位置演算方法
【課題】低コスト化を実現できる車両位置演算装置を提供する。
【解決手段】複数車線道路のうち、一の車線を走行する自車両の位置を計測する自車両位置計測手段と、複数車線道路のうち、他の車線を走行する他車両を検出するセンサ11と、センサ11の検出信号に基づき、自車両に対する他車両の方位を演算する他車両方位演算手段と、一の車線と他の車線との間隔を特定する車線間隔特定手段と、自車両の位置、他車両の方位及び間隔に基づいて、他車両の位置を演算する他車両位置演算手段を有する。
(もっと読む)
測定装置
【課題】被検物を高精度に測定する。
【解決手段】測定装置11の傾斜回転テーブル14は、被検物が載置され、回転軸L1を中心に回転駆動する回転テーブル21と、回転テーブル21が回転可能に装着され、水平方向に延びる傾斜軸L2を中心に傾斜駆動する傾斜テーブル22を備える。また、傾斜回転テーブル14は、傾斜テーブル22に対する回転テーブル21の変位を測定する変位センサ31乃至33と、傾斜テーブルの鉛直方向の変位を測定する変位センサ34を備える。本発明は、例えば、傾斜回転テーブルを有する測定装置に適用できる。
(もっと読む)
車両のホイールアライメント調整方法
【課題】専用の評価装置を設けることなく、アライメント調整装置でスラスト角を調整できる車両のホイールアライメント調整方法を提供すること。
【解決手段】本発明の車両のホイールアライメント調整方法は、車両の左右前後の車輪の位置を検出するステップと、予め設定されている装置中心線MCに平行な方向への車輪13、14のずれ量を測定するセットバック量測定ステップと、左右の車輪13、14の装置中心線MCに直交する方向の距離を測定するトレッド量測定ステップと、測定ステップにより測定したセットバック量Sおよび後軸トレッド量TBに基づいて、スラスト角θを算出するステップと、を備える。
(もっと読む)
41 - 60 / 166
[ Back to top ]