
Fターム[2F069CC08]の内容
測定手段を特定しない測長装置 (16,435) | 測定対象物の形状 (493) | 球状 (34)
Fターム[2F069CC08]に分類される特許
1 - 20 / 34
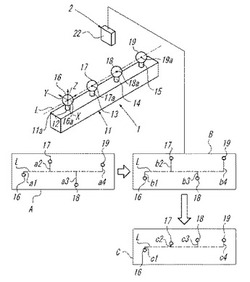
非接触座標測定機の真直度評価方法および真直度評価装置
【課題】
非接触座標測定機の真直度の評価作業に時間が掛からないようにする。
【解決手段】
直方体形の基材11と基材11の長さ方向に間隔を介して固定された複数の球体16,17,18,19とからなる評価用標準器1を高精度の接触座標測定機で測定して評価用標準器1の球体16,17,18,19の中心の位置の真直度についての校正値Aを得る第1の手順と、評価する非接触座標測定機2で評価用標準器1を測定して評価用標準器1の球体16,17,18,19の中心の位置の真直度についての測定値Bを得る第2の手順と、測定値Bから校正値Aを引いた補正値Cから非接触座標測定機2の真直度を評価する第3の手順とを実行する。
(もっと読む)
ワーク保持装置及び、このワーク保持装置を備えた3次元形状測定装置

【課題】精密なワークでも保持可能なワーク保持装置及びこのワーク保持装置を使用した3次元形状測定装置を提供する。
【解決手段】ワーク保持装置3は、ワークWを保持する回転ヤトイ31と、ベース部材32と、回転昇降機構33と、を有する。回転昇降機構33は、支持部34を上昇させ回転ヤトイ31の背面31Rと接触させ、この回転ヤトイ31をベース部材32から浮かせた状態で回転させる。また、支持部34を下降させ、回転ヤトイ31をベース部材32に着座させた状態でワークWの測定を行う。
(もっと読む)
計測装置
【課題】装置の高コスト化を抑えながら、被検面の形状を高精度に計測することができる技術を提供する。
【解決手段】被検物を保持する保持面を含む保持部と、被検面と被検面の形状を計測するための基準となる基準位置との間の距離を計測する距離計測部と、基準位置が被検面に沿うように距離計測部を駆動する駆動部と、駆動部によって駆動される距離計測部の基準位置を測定する位置測定部と、距離計測部によって計測された被検面と基準位置との間の距離と位置測定部によって測定された基準位置とに基づいて被検面の形状を算出する処理部と、を有し、位置測定部は、距離計測部に配置されて互いに異なる測定軸を有するレーザ干渉計と、レーザ干渉計のそれぞれからの光をそれぞれ反射する基準ミラーとを含み、レーザ干渉計の原点と基準ミラーとの間の距離を測定することで基準位置を測定し、基準ミラーの法線が保持面を含む面に交差するように配置される。
(もっと読む)
誤差分布算出方法、形状測定方法、および形状測定装置
【課題】複数の測定プローブを備えたフレーム部に起因する回転誤差を短時間且つ精度良く算出できる、誤差分布算出方法、形状測定方法、および形状測定装置を提供する。
【解決手段】被検物が載置される載置部と、被検物の形状を測定する複数の測定プローブの各々が所定のオフセットだけ離間して取り付けられた測定部と、測定部を互いに直交する2方向に前記載置部上を移動させる移動部と、を備えた形状測定装置における移動部による回転誤差分布を算出する誤差分布算出方法である。載置部上と所定の関係を持った位置に基準部材を配置する配置工程と、測定プローブの少なくとも2つが、基準部材の座標値をそれぞれ測定する測定工程と、各々の測定座標値の差分に基づいて移動部による回転誤差分布を算出する算出工程と、を備える。
(もっと読む)
三次元形状測定装置
【課題】測定物の上面も側面も10〜100ナノメートルの超高精度で走査測定できる三次元形状測定装置を提供する。
【解決手段】上面スタイラス1aは、エアスライド1cによりXY方向には振れずに測定物の上面を走査測定でき、第1のミラー1bとレンズ2deによりZ座標も精度良く測定でき、側面スタイラス2iaは、XY方向にのみ変位可能でZ方向には振れないので測定物の側面を走査測定でき、側面スタイラス2iaのZ座標測定は前記第1のミラー1bのZ座標測定値を利用して、より高精度に側面スタイラスのXY変位を傾斜角度測定部2jで測定することができる。
(もっと読む)
球体移動経路の測定方法
【課題】球体の実際の移動状態に近いデータを獲得可能な球体移動経路の測定方法を提供する。
【解決手段】操作ユニットおよび三軸加速度計Cを用意し、三軸加速度計Cと操作ユニットとを接続させ、三軸加速度計Cで測定したデータを操作ユニットに伝送し、測定対象物Oの内部に三軸加速度計Cを置き、三軸加速度計CでXYZ三軸の空間座標を定義し、第一測定時点に三軸の初期位置を確認し、第二測定時点に比較位置を確認し、データを操作ユニットに伝送する。XYZ三軸のそれぞれの比較位置と初期位置との間の角度を比較し、XYZ三軸の軸方向上の力を受けた後の加速度データと、それぞれ軸方向の分力のベクトルと、それぞれ軸に対する旋転力とを算出する。三つの軸方向の加速度値と、測定対象物Oの重量およびサイズとに基づいて、測定対象物Oの初期速度、飛行時間、飛行高度、飛行距離および旋転速度のうちの少なくとも一つのデータを求める。
(もっと読む)
多軸工作機械の幾何誤差の計測方法
【課題】外乱に基づいて不適切な幾何誤差が計測された場合であっても、そのような不適切な幾何誤差に基づく補正の実行により多軸工作機械の加工精度が低下する事態を、きわめて効果的に防止することが可能な幾何誤差の計測方法を提供する。
【解決手段】幾何誤差の計測においては外乱誤差有無確認ステップを実行し、幾何誤差を同定する前に、A軸およびC軸を複数の条件で割り出して、ターゲット球12の直径を計測し、それらの計測値のバラツキを算出し、それらのバラツキが予め設定された直径変動量許容値Daを超えた場合には、計測ミスと判断する。
(もっと読む)
校正用冶具、校正方法、及び該校正用冶具が搭載可能な形状測定装置
【課題】レンズの偏心を測定できる形状測定装置を簡易的に、かつ高精度に校正できる校正用冶具、校正方法、及び該校正用冶具が搭載可能な形状測定装置を提供する。
【解決手段】校正用冶具100は、中心が円周上を3等分し、計測用基準球を接するように設置できる3個の基準球2を備える。形状測定装置は、該校正用冶具を配置可能であり、被測定物の形状に関する情報を取得するための第1プローブと、校正用冶具に対して第1プローブと反対側に設けられ被測定物の形状に関する情報を取得するための第2プローブと、第1プローブ及び第2プローブにより、配置された計測用基準球を測定して第1測定結果及び第2測定結果を求める測定部と、第1測定結果及び第2測定結果を比較してシフトを算出するシフト量算出部と、を備える。校正方法は、上記形状測定装置を用いた測定ステップとシフト量等を算出するシフト量算出ステップとを備える。
(もっと読む)
標識検定装置
【課題】標識検出器と組み合わせて用いられる標識の、検出原理上の回転対称性の程度を評価するための標識検定装置を、提供する。
【解決手段】標識検定装置は、装着部により検定対象の標識を回転軸部材に装着して、駆動部によって回転軸部材に所定の周期運動を与えた場合に、標識検出器から得られた標識の検出データを、処理部に入力し、処理部のデータ処理によって標識の検出原理上の軸対称性の指標データを検定データとして得る。
(もっと読む)
表面形状の測定方法
【課題】プローブを用いて、容易かつ高精度に被検物の表面形状を測定することができる表面形状の測定方法を提供する。
【解決手段】プローブと被検物とを相対移動させることにより、被検物の表面形状を測定する表面形状測定方法は、被検物の第1の領域の第1表面形状データを取得する第1取得工程と、第1表面形状データと少なくとも一部が重複する被検物の第2の領域の第2表面形状データを取得する第2取得工程と、第1表面形状データのうち、第2表面形状データと重複する領域のデータに対して、近似関数による当てはめを行って近似曲線を取得する近似曲線取得工程S20と、近似曲線を用いて第2表面形状データの補正量を算出する補正量算出工程S30と、算出された補正量に基づいて、第2表面形状データ全体を座標変換する座標変換工程S40と、第1表面形状データと、座標変換が行われた第2表面形状データとを統合する工程とを備える。
(もっと読む)
球体の非接触式3軸角速度計測法
【課題】高速回転する球状物体の角速度ベクトルを非接触で計測する手法およびその機構に関するものである。
【解決手段】球体に、目的に応じて選択した適当な物理量の偏向を与えるマーカーをつけ、球体の周囲に配置したセンサによってこれを計測することによって、球体の角速度ベクトルを算出するものである。また、従来の手法においては限定的であった、回転軸方向の計測可能範囲を大幅に拡大するものである。
(もっと読む)
球面形状測定装置および球面形状測定方法
【課題】 非接触で球面形状を高精度に測定できる球面形状測定装置および球面形状測定方法を提供する。
【解決手段】 軸部1bの一端に球面形状部1aを有する被測定物1を、被測定物支持手段10により軸部1bの中心軸回りに回転させる。球面形状部1aの表面位置を非接触で測定する非接触変位計31を、その中心軸上の所定位置を回動中心として軸部1bの中心軸を含む平面内で、変位計回動手段32により回動させる。被接触変位計31の軸方向位置は軸方向位置調整手段41で調整する。これにより、被測定物1を回転させながら、その軸部1bの中心軸を含む平面内で前記球面形状部1aの中心を回動中心として非接触変位計31を回動させて、球面形状部1aの球面形状測定を行う。
(もっと読む)
長軸部を有する物体の長軸部の先端座標と該物体の位置姿勢を定義する手段との3次元相対関係測定方法およびシステム
【課題】 3次元形状測定精度が通常の環境下でも、手術器具のように長軸部を有する物体の先端部と位置姿勢検出用の標識部との3次元相対関係を精度良く較正できる。
【解決手段】 被測定物体10の長軸部の先端部と第1標識部12との3次元相対関係測定方法であって、較正用物体20を被測定物体の長軸部の先端部に取付けるステップと、3次元形状測定装置により被測定物体および較正用物体の立体形状データ群を測定するステップと、立体形状データ群から第1標識部の位置および姿勢と第2標識部21,22,23の位置および立体形状とを算出するステップと、第2標識部の位置および立体形状と当接部と第2標識部との3次元相対関係とに基づいて当接部24の3次元座標を算出するステップと、第1標識部の位置および姿勢と当接部の3次元座標とに基づいて被測定物体の長軸部の先端部と第1標識部との3次元相対関係を算出するステップと、を有する。
(もっと読む)
相対高さ検出装置
【課題】突出した2点あるいは3点間の相対高さを、簡単な構成により、高い精度で検出可能な相対高さ検出装置を提案すること。
【解決手段】相対高さ検出装置1は傾斜表示板2を備えており、基準面5aに載せた測定対象の球体a、bの上に点接触状態で傾斜表示板2を載せる。傾斜表示板2には角度センサ3が組み込まれており、球体a、bの高低差に対応した傾斜姿勢となっている傾斜表示板2の傾斜角度が角度センサ3によって測定される。演算装置4では、傾斜角度θxと、球体a、b間の既知の距離L1に基づき、球体a、bの高さの違いを検出する。球体a、bの微小な高低差が傾斜表示板2の比較的大きな傾斜角度として現れるので、この傾斜角度に基づき、球体a、b間の高低差を高い分解能で検出できる。
(もっと読む)
玉軸受のボール位相検出方法
【課題】安価なセンサと信号処理によって、正確にボールの位相を検出することができる玉軸受のボール位相検出方法を提供する。
【解決手段】玉軸受1のボール位相検出方法は、センサ13が軸受1の軸方向側方で対向するようにセンサ13及び軸受1を設置する工程と、軸受1を回転させながら、軸受1内に挿入されたボール4又は保持器5とセンサ13との距離に応じた信号を検出する工程と、検出された信号を、軸受1の回転角度情報と共に、制御装置14に出力する工程と、制御装置14にて、検出された信号から最小二乗法を用いて2次関数を求め、ボール4の頂点位置を判断する工程と、を備える。
(もっと読む)
倣いプローブの校正方法
【課題】短時間でかつ高精度に倣いプローブの校正を行う倣いプローブの校正方法を提供する。
【解決手段】半径および中心座標値が既知の真球であるマスターボール7の表面を倣い測定する測定経路として第1測定経路71と第2測定経路72とを設定する(測定経路設定工程)。次に、測定経路設定工程において設定された第1測定経路71および第2測定経路72を倣い測定する(測定工程)。測定工程における倣いプローブの検出センサの出力値を測定経路71、72上の座標値と対比して、この検出センサの出力値を補正する補正データを算出する(補正データ算出工程)。ここで、測定経路設定工程にて設定される第1測定経路71および第2測定経路72は、マスターボール7の表面において螺旋形状である。そして、2つの測定経路71、72の起点711、721は赤道上において互いに90度ずれている。
(もっと読む)
インクジェットプリンタによって放出されるインク液滴の液滴寸法を確定する方法
【課題】インクジェットプリンタによって放出されたインク液滴の平均液滴寸法を確定する改良された方法を提供する。
【解決手段】インクジェットプリンタの略所定の容積を有するインク容器に対して与えられるインク量を測定し、インク容器内のインクレベルを測定し、インク容器に対して作動可能に接続された、少なくとも1つのノズルによって放出されたインク液滴を測定し、これらの測定値に基づいて平均インク液滴寸法を確定する。
(もっと読む)
非接触計測データの解析システム
【課題】 物体の三次元形状に関する非接触計測データと設計データとを比較して、その誤差値を数値化するようにした非接触計測データの解析システムを提供する。
【解決手段】 管理部位としてボルト13a又はナット13bの計測の際に、計測部が、寸法管理された円柱部16a,17aを有する計測治具16,17をボルト又はナットに取り付けて、計測治具の輪郭を含めた点群データを作成し、比較部が、点群データから抽出した計測治具の外接円16c,17cに基づいて外接円の中心と面角度を算出し、算出した外接円の中心と面角度と既知の円柱部部の寸法に基づいてボルト又はナットの中心座標を算出し、さらに中心座標と対応する基準点データとを比較して誤差を計算する。
(もっと読む)
センサ装置を備えたボールジョイント並びに負荷を測定するための方法並びに摩耗を測定するための方法
本発明は、例えば自動車の車軸系のためのボールジョイント並びに、ボールジョイントにおける負荷及び摩耗を測定するための方法に関する。ボールジョイントは、ほぼリング状またはポット状のジョイントケーシング1を有しており、そのほぼ円筒状の内室にはボールシェル2が配置されている。ボールシェル2には、ボールピンのボール3が滑動可能に収容されている。さらにボールジョイントは、力若しくは負荷を測定するためのセンサ装置を有している。
本発明によれば、ボールジョイントは、センサ装置が、ボールシェル2の領域に配置された、ジョイントボール1とボールシェル2との間に作用する力もしくは押圧力を測定するための少なくとも2つの圧力もしくは力センサ6から成るセンサ装置4によって形成されていることを特徴としている。
本発明によるボールジョイントは、センサ機器を内蔵しているにもかかわらず堅牢であって、力若しくは、ボールジョイントに作用する負荷のベクトル検出を可能にする。本発明による方法により、ボールジョイントの運転状態若しくは摩耗状態の永続的な監視が、特にボールシェルのプレロード力を測定することにより可能である。 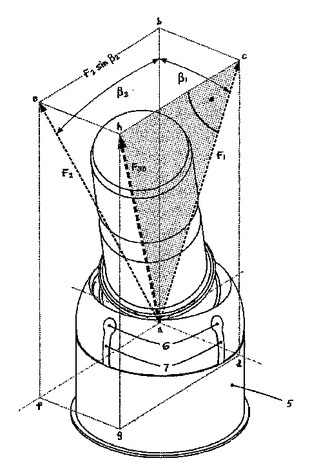 (もっと読む)
(もっと読む)
3次元形状測定装置及び方法
【課題】被測定物の3次元形状を高精度に測定することが可能となる3次元形状測定装置及び方法の提供。
【解決手段】一対のプローブ20a,20bを、その先端同士が所定の間隔を開けて一直線状に対向するように配置し、被測定物1を、被測定物1の表面側及び裏面側がそれぞれ一対のプローブに対向するように位置させた後に、一対のプローブ20a,20bのお互いの位置関係を変更することなく、該一対のプローブ間における被測定物1の相対的な位置をスライド移動させて、一方のプローブにより被測定物1表面の3次元形状を測定し、次いで、他方のプローブにより被測定物1裏面の3次元形状を測定する。
(もっと読む)
1 - 20 / 34
[ Back to top ]