
Fターム[2F069DD15]の内容
測定手段を特定しない測長装置 (16,435) | 目的 (603) | 測定速度の向上 (91)
Fターム[2F069DD15]に分類される特許
61 - 80 / 91
検査装置および検査方法
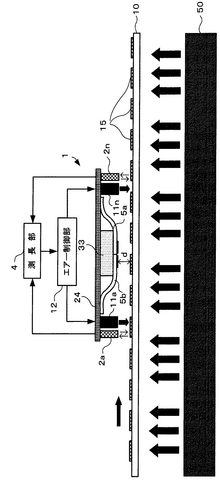
【課題】 検査対象の良否を高速に検査できる検査装置および検査方法を提供する。
【解決手段】 検査対象である液晶パネル(ガラス基板)10の上部にセンサ1を固定して、その検査対象10をエアフローにより浮上させて非接触検査を行う際,測長部4によるレーザ測長によりセンサ1と液晶パネル10間の距離を計測し、その結果をもとにセンサ側からも、エアー噴出部11によるエアー噴出を行ってセンサ1と液晶パネル10間の間隔(ギャップ)を制御する。
(もっと読む)
掘進機および計測装置

【課題】 チャンバ内の土砂の性状を、リアルタイムでより合理的に把握できる掘進機および計測装置を提供すること。
【解決手段】 計測装置20を、カッタ3の板状部材17に連結され、チャンバ9内に突出した棒状材19、棒状材19に設置された歪みゲージ21、コンピュータ(図示せず)等で構成する。棒状材19は、一端が板状部材17に固定されるか、ピン接合される。掘進機1がカッタ3を回転させて地山を掘削すると、カッタ3の板状部材17に連結された計測装置20は、掘削土砂が充満したチャンバ9内を回転移動する。計測装置20の歪みゲージ21は、チャンバ9内の掘削土砂から受ける力による棒状材19のたわみ(変位もしくは変形)を計測する。計測装置20では、コンピュータ(図示せず)等に歪みゲージ21が計測した計測値を送り、計測値に基づいてチャンバ9内の掘削土砂の性状を把握する。
(もっと読む)
近接場光顕微鏡、近接場光による試料測定方法
【課題】 プローブの試料への衝突による破損を防ぎ、確実かつ短時間でプローブを試料に対して接近させることが可能な近接場光顕微鏡を提供する。
【解決手段】 近接場光プローブ2先端から試料までの距離を検出する距離検出手段31と、近接場光プローブ2の基準面位置情報に基づいて近接場光プローブ2と試料20を近接場光領域もしくはその近傍まで接近させる距離制御手段15とを備えた近接場光顕微鏡。
(もっと読む)
三次元測定装置及びそれに用いられるプローブ
【課題】 高精度・高速で且つ安定な倣い測定を実現可能とする。
【解決手段】 三次元測定装置の倣い測定に用いられ、先端にスタイラス18を装着してなるプローブにおいて、スタイラス18の先端球32の表面にDLC膜35が形成され、その摩擦係数が0.1以下に設定されている。
(もっと読む)
電機子コアの検査方法及び検査装置
【課題】 容易且つ高精度に形状公差を検査することが可能な電機子コアの検査方法を提供すること。
【解決手段】 波形計測部15は、各コアシートの切断面、詳しくはその厚み方向において異なる複数の計測箇所に臨むように各々配置された複数のセンサ2の出力する各波形信号Sa〜Scに基づいて、各計測箇所における各々の凹凸変化を示す複数の計測データDa〜Dcを生成する。演算部16は、波形計測部15から入力された各計測データDa〜Dcをそれぞれ予め設定された複数の区間に区分し、その各区間毎に破断部に起因するノイズ成分の有無を判定することにより、その有効/無効を評価する。そして、かかる評価に基づいて各区間毎の有効な区間データを抽出し、その各区間データを合成することにより破断部に起因するノイズを含まない検査データDtを生成する。
(もっと読む)
電線の弛度測定方法および装置
【課題】大がかりな設備を要することなく容易に電線の弛度を測定できる電線の弛度測定方法および装置を提供すること。
【解決手段】第1、2の支持点i,jの第1および第2のカテナリー角α,βを測定する第1、第2の角度検出手段11,12と、各データを入力する入力手段13と、カテナリー曲線を表す式を積分して求めた計算式に、α,βの測定値および電線の長さLの推定値等の各データを代入し演算して長さLの計算値を求める第1の演算手段14と、計算値と推定値を比較して、両値が予め設定された精度で一致する否かを判定する判定手段14と、一致すれば、推定値を長さLの測定値と決定する決定手段14と、α,β、長さLの測定値に基づいて電線の弛度を演算する第2の演算手段14とを備え、判定手段14で一致しなければ一致するまで、計算値を推定値として計算式に代入して再度第1の演算手段14による演算と判定手段14による判定を繰り返す。
(もっと読む)
サードレール測定器
【課題】無理な体勢をとらずに測定可能であって、測定作業に熟練を要さず、誰でも測定が可能なサードレール測定器を提供すること。
【解決手段】電車の走行レールRと平行に設けられた集電用のサードレールT、及びサードレールTの少なくとも上方に配位された防護板Pの、走行レールRに対する位置関係を測定するためのサードレール測定器であって、走行レールR上に配位される支持部材1と測定部とが備えられたものであり、測定部は、支持部材1に対して移動可能であって、サードレールTと防護板Pとの少なくとも一方に一部を当接させることのできる当接部材31,41aと、測定値を表示できる測定値表示部32,41bとが備えられたものであり、上記の測定値表示部32,41bが、上記の支持部材1が走行レールR上に配位された際において、防護板Pよりも走行レール寄りの位置に配位されることを特徴とするサードレール測定器を提供する。
(もっと読む)
スピンドルの制動装置および測定器
【課題】スピンドルの操作性および耐久性を向上させることのできるスピンドルの制動装置および測定器を提供すること。
【解決手段】制動装置600は、スピンドル300が移動するシリンダ610と、このシリンダ610内を2つに区画するピストン620と、スピンドル300とピストン620とを、軸方向および軸直交方向に対し一定のクリアランス633を介して連結する連動手段660と備え、連動手段660は、ピストン620に形成された中空室623と、スピンドル300の他端に設けられ、他端側が中空室623内に係合収納される係合部630とを含み構成され、スピンドル300が一端側へ移動する際には、係合部630が中空室623の一端側内壁に当接し、かつ、他端側へ移動する際には、係合部630が中空室623の他端側内壁に当接するように形成されている。
(もっと読む)
タンク底板の板厚測定装置
【課題】 タンク底板鋼板の板厚の測定をより効率的に行うこと。
【解決手段】 タンク底板の板厚を測定する板厚測定装置Aであって、板厚測定装置Aの筐体1には、装置Aを車輪を用いて走行させる走行機構10と、超音波探触子22及び渦流型センサ23を搭載してタンク底板の情報を取得するための測定台車20と、測定台車20から得た情報を演算処理する演算手段30と、演算手段30により得た情報を表示する表示手段50と、超音波探触子22に対して接触媒質を供給する接触媒質供給手段60と、上記各手段に電源を供給する電源供給手段70と、を一体的に有することを特徴とする。
(もっと読む)
情報処理方法および装置
【課題】 物体に装着した較正対象指標の該物体に対する配置情報と、該物体に装着したセンサの該物体に対する配置情報とを、同時に簡便かつ正確に求めることができるようにする。
【解決手段】 物体を客観視点位置から撮影した客観視点画像を取得し、センサの計測値を入力し、客観視点画像から較正対象指標の画像座標に関する情報を検出し、計測値と較正対象指標の画像座標に関する情報とを用いて、物体に装着した較正対象指標の物体に対する配置情報と、物体に装着したセンサの物体に対する配置情報とを求める。
(もっと読む)
レーザ加工装置
【課題】 レーザ加工装置において加工ヘッドを被加工面へアプローチする際、アプローチ動作中の状況に応じた迅速で最適な制御を可能にすると共に、制御系の遅れによるオーバーシュートを抑制し、短時間で信頼性よく目標位置に収束させる。
【解決手段】 被加工面位置6aを検出すると共に、加工ヘッドの位置制御に用いるその時点の位置指令4aをフィードバックして、アプローチ終了までの上記加工ヘッドに対する残り位置指令分に対応する距離8aを演算し、この残指令距離8aに対応する速度指令13aを予め設定された最大加速度および最大速度とに基づいて演算し、該速度指令13aを位置指令4aに変換して、加工ヘッドの移動を位置制御する。
(もっと読む)
道路線形自動測量装置
【課題】いかなる環境下であっても、自車両の位置及び走行している道路の曲率を自動的に得ることができる道路線形自動測量装置を得る。
【解決手段】複合慣性測量部3がGPS衛星及びGPS基準局10からの電波を受信できる道路では、GPS信号及びGPS補正信号に基づく移動車両7の位置データに基づいて加速度の誤差、角速度の誤差、姿勢角の誤差、慣性位置の誤差、慣性速度の誤差を逐次推定し、また、GPS衛星及びGPS基準局10からの電波を受信できない道路では車速計5からの速度に基づいて各誤差を推定する。そして、データ処理部が複合慣性測量部3からの位置、方位角、姿勢角に基づいて道路の曲率半径、縦横勾配を求めて表示又は蓄積する。
(もっと読む)
平坦度測定器
【課題】 被測定物の平坦度を効率的に測定可能な平坦度測定器を提供する。
【解決手段】 平坦度測定器110において、センサの移動方式として、X軸方向とY軸方向の2軸走査移動方式ではなく、1軸走査回転方式を導入した。1軸走査回転方式の平坦度測定器を用いることで、センサ位置を任意に移動できるばかりではなく、移動面積を最小限に押さえる事ができるからである。したがって、平坦度測定器の小型化・軽量化を実現することができた。
(もっと読む)
クランク軸のデフレクション計測装置及び計測方法
【課題】クランク軸のデフレクション計測において、ジャーナル部回転角度とピン部回転角度との対応づけを高精度に行うこと。
【解決手段】デフレクション計測装置は、クランク軸1の回転角度を角度データとして検出する角度検出手段7と、クランクアーム4の内股距離を距離データとして検出する距離検出手段8と、各データを処理する処理ユニット9とを備え、距離検出手段8には、角度データをトリガー信号として、前記距離を計測する計測部13と、角度データと検出された距離データとを対とした計測データを記憶可能なメモリ−14と、距離データの検出終了後にメモリ−14内の計測データを無線送信する送信部16とが備えられ、処理ユニット9には、欠落した計測データを補完する補完手段が設けられている。
(もっと読む)
スコープ装置、工具の研削装置、工具の製造方法及び工具の検査方法
【課題】 研削される工具を測定のつど着脱することなく、工具の所要寸法を測定できるスコープ装置、工具の研削装置、工具の製造方法及び工具の検査方法を提供する。
【解決手段】 工作機械4のテーブル6に着脱自在とされており、テーブル6に着脱可能とされたベース21と、工具1の被測定部に対向して位置するようにベース21に取り付けられたスコープ本体25とを備えてなり、被測定部の中心を通り、スコープ本体25側へ延びるように測定基準線Yを設定したときに、スコープ本体25が、測定基準線Yの方向に移動自在であって、このYを含む平面上において、Yに直交する方向Xに移動自在であって、且つ、このYを通り、前記平面に直交する方向Zに移動自在に支持されると共に、スコープ本体25の方向Xへの移動量を計測する計測手段23を備えた。
(もっと読む)
樹脂製摺動部品の摩耗量予測方法及びそれを使用した樹脂製摺動部品の設計方法
【課題】 熱可塑性樹脂製擢動部品の精度の高い摩耗量の予測方法と、これを用いて所定時間使用後の摩耗量を所定の値以下とする樹脂製摺動部品の設計方法を提供することである。
【解決手段】 摺動部品の摩耗量Yを下記(1)〜(4)により予測する。
(1)二つの摺動部品と同じ材料の標準試験片の限界PV値Pvを標準条件中で測定し、限界滑り線速度Vcを求める。
(2)Vc、摺動面圧P、滑り線速度V、低樹脂流動温度Tm、雰囲気温度Trから、摺動面温度Tを式(i):T=(V/Vc)×(Tm-23)+Trにより推算する。
(3)標準試験片と同じ試験片から温度Tにおける比摩耗量Aを測定する。
(4)比摩耗量A、摺動距離Dと摺動面負荷荷重Fから、摩耗量Yを式(ii):Y=A×D×Fにより推算する。
(もっと読む)
位置検出装置、露光装置、計測システム及び位置検出方法
【課題】複数のセンサーで同期して計測を行ない、結果を高速かつ高品質に信号処理部に伝送し、もって位置検出を高速かつ高精度に行なう位置検出装置を提供する。
【解決手段】位置検出装置200においては、センサー制御手段219,229,239及び269において、センサー211,212,221〜223,231及び261における検出結果のアナログ信号をデジタル信号に変換し、デジタル信号としてそのデータを光通信ネットワークで構築された伝送手段270を介して信号処理手段280に転送している。従って、複数のセンサーにおいて同時に検出されたデータを、同時並列的にデジタル信号に変換し、伝送手段を介して実質的に同時に信号処理手段に提供することができ、複数のセンサーで同時に検出したデータを用いた位置検出処理や、リアルタイムでの位置検出処理を適切に行なうことができる。
(もっと読む)
高速走査用プローブ
座標位置決定装置2のアーム6に取り付くためのハウジング16と、スタイラス支持部材28に取り付けられたスタイラス10とを備える測定プローブ5。
スタイラス10とスタイラス支持部材28は、ハウジング16に関して偏向可能である。第1のトランスデューサシステム40−48は、座標位置決定装置2のアーム6に対するスタイラス支持部材28の移動を測定する。第2のトランスデューサシステム38は、スタイラス支持部材28に対するスタイラスチップ12の移動を測定する。全スタイラス偏向の測定が、第1および第2のトランスデューサシステムからのデータを組合せることにより達成される。  (もっと読む)
(もっと読む)
加工物検査方法
三次元座標測定装置に取り付けられた非接触式プローブを使用してアーチファクトを検査する方法を提供する。アーチファクトは、最初に接触式プローブを用いて測定され(28)、次いで、非接触式プローブを用いて測定される(32)。接触式プローブおよび非接触式プローブを用いて取得された測定値の間の差に対応する誤差マップまたは関数が生成される(34)。この誤差マップまたは関数は、プローブを較正するのに使用することができる。あるいは、次のアーチファクトは、非接触式プローブを用いて測定され(36)、誤差マップまたは関数を使用して測定値が補正される(38)。  (もっと読む)
(もっと読む)
粗さ曲線の抽出方法および3次元表面粗さ形状の抽出方法
【課題】 断面曲線から粗さ曲線や3次元表示の粗さ形状を抽出する過程で、演算回数を少なくし、処理時間を短縮すると共にエンド効果を無くする。
【解決手段】 断面曲線のデータを間引き率Dでダウンサンプリングして断面曲線の間引きデータを得てから、間引きデータにカットオフ波長λ'c =λc/Dのガウシアンフィルタを適用してカットオフ波長λc以上の長波長成分を抽出し、断面曲線からカットオフ波長λc以上の長波長成分を減算して粗さ曲線を得る。
(もっと読む)
61 - 80 / 91
[ Back to top ]