
Fターム[2F069DD20]の内容
測定手段を特定しない測長装置 (16,435) | 目的 (603) | 測定範囲の拡大 (33)
Fターム[2F069DD20]に分類される特許
1 - 20 / 33
多点検査装置と方法
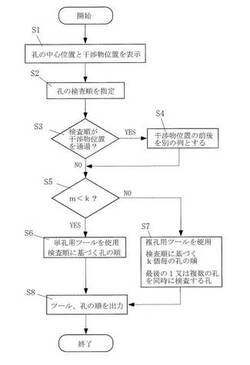
【課題】単孔用ツールと複孔用ツールを併用し、多数の箇所を最短時間又はこれに近い短時間で検査することができる多点検査装置と方法を提供する。
【解決手段】単孔用ツール14aと、複孔用ツール14bと、ツールのいずれかを孔2に対して位置決めする位置決め装置12と、各孔2の中心位置と干渉物4の位置とを記憶する記憶装置18とを備える。(A)各孔2の中心位置と干渉物位置を表示し、(B)指定した孔2の検査順が干渉物位置を通過する場合に、その前後を別の列として扱い、(C)検査順の各列に含まれる孔数mが、複孔用ツール14bで同時に検査する孔数kより小さい場合に、単孔用ツール14aの使用と、検査順に基づく孔2の順を決定し、(D)m≧kの場合に、複孔用ツール14bの使用と、検査順に基づくk個毎の孔2の順を決定し、かつkより少ない最後の1又は複数の孔を複孔用ツール14bで同時に検査する孔を決定する。
(もっと読む)
路面凹凸評価システム

【課題】路面の凹凸評価或いはそれに必要な計測を行うことが出来、路面の凹凸評価或いはそれに必要な計測を行う車両の走行速度の変動に対処することが出来る路面凹凸評価システムの提供。
【解決手段】車両(1)に搭載された路面凹凸評価装置(10)と、当該車両(1)の車速を計測する速度センサ(4)と、当該車両(1)の垂直方向(上下方向)加速度を計測する加速度センサ(6)と、衛星(7)からの信号に基づいて当該車両の現在位置の情報(位置情報)を取得する装置(GPSレシーバー8)を備えている。
(もっと読む)
被測定面の測定方法
【課題】ピッチング誤差やローリング誤差を抽出でき高精度な測定を行える被測定面の測定方法を提供する。
【解決手段】被測定面を回転させる場合における回転軸線の振れに相当するティルトモーション誤差は、被測定面を高精度に測定する上で除去すべきでものである。従来技術によれば、かかるティルトモーション誤差を簡易に除去する方法がなかった、これに対し本発明によれば、前記被測定面を備えた部材を回転させながら、前記第1の2次元角度センサにより前記第1の測定点の面法線角度を2次元で測定し、前記第2の2次元角度センサにより前記第2の測定点の面法線角度を2次元で測定し、前記第1の2次元角度センサの測定値に基づいて、前記第2の2次元角度センサの測定値からティルトモーション誤差を排除することができる。
(もっと読む)
物理量変化測定装置、物理量変化測定方法、物理量変化測定用プログラム、および、このプログラムを記録した記録媒体
【課題】測定レンジを狭めることなく高精度の量子化を行う物理量変化測定装置を提供する。
【解決手段】物理量の変化に応じた一方の電圧信号11aを第1のデジタル信号に変換する第1のデジタル変換処理部30と、これを第1のアナログ信号に変換するアナログ変換処理部31と、他方の電圧信号11bから第1のアナログ信号31aを減算した減算信号40aを出力する減算処理部40と、減算信号40aを拡大して信号41aを出力する第2の増幅部41と、前記信号41aを第2のデジタル信号70aに変換する第2のデジタル変換処理部70と、この第2のデジタル信号70aと拡大した第1のデジタル信号32aを加算した出力信号80aを出力する加算処理部80と、を備える。
(もっと読む)
舵角検出装置
【課題】ステアリング軸の回転角度の検出値の積算による舵角の検出を、積算のための始点が不明となる状況下においても遅滞なく行わせることができるようにする。
【解決手段】ステアリング軸3に周設された主動歯車61に、外周縁から突出するように押圧片66を設け、主動歯車61に並設した従動円板63に、複数の押圧ピン65,65…と、夫々の押圧ピン65,65…の両側の部分歯部64,64…とを設け、主動歯車61が1回転する毎に押圧片66が押圧ピン65を押して従動円板63を回転させ、部分歯部64が主動歯車61に噛合して従動円板63が定量回転するように構成し、この従動円板63の回転位置から得られる絶対舵角をステアリング軸3の回転角度の積算のための始点として用いる。
(もっと読む)
測定装置、測定基準及び精密工作機械
【課題】本発明は平面形状の高精度測定を変位計の走査によって実現することを課題とする。
【解決手段】面上の半径rの円に沿う凹凸を変位計Dbの回転走査で測定するときに,回転中の軸方向の出入りを検出する変位計Daと,変位計Da,変位計Dbの測定点を結ぶ直径上の,半径Rの円に沿う走査測定をする変位計Dc,変位計Dd,合計4本を用意して,半径Rの円が描かれる面が回転走査軸と同心で,前記半径rの円に対して相対的に180度回転した位置にも反転設置できる基準円輪SC上にある形にし,基準円輪SCの反転操作の前後の回転走査における4本の変位計の出力から,合計6つを選んで用いることで,走査のための回転運動誤差と半径rの円と半径Rの円に沿う凹凸形状を分離同定する。この結果得られた円に沿う凹凸形状と,別の方法を用いて複数の直径上で得られた直線に沿う凹凸形状とを数学的に合成すると平面を正しく構成することが可能となる。
(もっと読む)
溝面形状測定装置および溝面形状測定方法およびプログラム
【課題】溝部の内部の溝幅や溝面の平面度等の溝面形状を容易かつ精度良く測定する。
【解決手段】溝面形状測定装置は、第1変位計12aとスロットダイの一方の対向面とが対向配置された状態にて、スロットダイを駆動装置により所定移動方向に移動させ、第1変位計12aと一方の対向面との間の距離を検出する。次に、変位計固定部材および各変位計の位置は不変とし、第2変位計12bとスロットダイの一方の対向面とが対向配置されるように、スロットダイを反転移動させ、スロットダイを駆動装置により所定移動方向に移動させ、第2変位計12bと一方の対向面との間の距離を検出する。検出した2つの距離から駆動装置の駆動に係る真直度誤差を相殺し、所定移動方向に対する真直度を得る。
(もっと読む)
舵角検出装置
【課題】全舵角範囲に亘る回転軸の回転角度を精度良く検出し、車両の舵角を簡素な構成にて精度良く検出可能な舵角検出装置を提供する。
【解決手段】ステアリングホイール30の操作に応じたステアリング軸3の回転を操舵用の車輪12,12に伝え、該車輪12,12の向きを変えて舵取りされる車両の操舵角度を、ステアリング軸3の複数回転に亘る回転角度を求めることにより検出する舵角検出装置において、ステアリング軸3に係合され、ステアリング軸3の回転に応じて移動する移動体6の移動位置を位置センサ7により検出し、この検出結果によりステアリング軸3が中立位置から左右の何回転目の領域にあるかを判定する。回転角センサにより判定された領域内でのステアリング軸3の回転角度を求めて全舵角範囲内での操舵角度を算出する。以上により簡素な構成により全舵角範囲に亘って高精度の舵角検出が可能となる。
(もっと読む)
回転角検出装置
【課題】簡易な構成でありながらも、360°を超える範囲の回転角の検出にも適用可能な回転角検出装置を提供する。
【解決手段】ステアリングシャフトSにウォームホイール10を外嵌しておき、このウォームホイール10、ウォームギア11および案内ねじ軸12により、ステアリングシャフトSの回転に応じてウォームギア11を直動させる送りねじ機構を構成した。そして、ウォームギア11をその軸心方向から挟み込む態様で2つのカンチレバー13,14を設けた。また、これらカンチレバー13,14に歪みゲージ素子16,17をそれぞれ貼着した。
(もっと読む)
回転角度測定装置
【課題】小型で測定精度の高い回転角度測定装置を提供する。
【解決手段】回転盤1に第一、第二案内溝2,3を形成して第一、第二移動体4,5を各案内溝に案内させて移動させる。第一、第二移動体4,5の回転角度を検出して両移動体の回転角度から回転盤1の絶対回転角度を演算部8で演算する。
(もっと読む)
プローブ及び走査型プローブ顕微鏡並びにプローブの製造方法
【課題】 アスペクト比の高い凹凸を有する試料の表面形状を感度良く観察することが可能であるとともに、試料の電気特性を検出することが可能であるプローブを提供する。
【解決手段】 プローブ20は、先端部21aが先鋭化されるとともに基端部21bが略棒状に形成され、導電性を有し、試料上を走査される探針21と、探針21が先端部22aに突出して設けられるとともに、探針21と電気的に接続される配線29が配設されたカンチレバー22と、カンチレバー22の基端部22bを、先端部22aが自由端となるように片持ち状態で固定する本体部23とを備えている。探針21の基端部21bの断面形状は、中空部30を有する略C形で、プローブ22の中心軸22dに対して略線対称となっている。
(もっと読む)
姿勢角検出装置及び姿勢角検出用プログラム
【課題】 測定対象部分の動きに拘らず、その姿勢角を正確に測定可能にすること。
【解決手段】 測定対象部分の回転角速度を検出するジャイロセンサ12と、前記測定対象部分における直交二方向の加速度をそれぞれ検出する加速度センサ13と、ジャイロセンサ12及び加速度センサ13からの検出値に基づいて、前記測定対象部分の姿勢角を演算する演算手段15とを備えて姿勢角検出装置10が構成されている。演算手段15は、ジャイロセンサ12の検出値から、所定周波数以上の高周波成分における対象方向の回転角度を求める角速度処理部17と、加速度センサ13の検出値から、所定周波数未満の低周波成分における前記対象方向の回転角度を求める加速度処理部18と、これら角速度処理部17及び加速度処理部18で求めた各回転角度を加算して前記姿勢角を求める姿勢角決定部20とを備えている。
(もっと読む)
多軸工作機械における旋回軸中心測定方法
【課題】正確な旋回軸中心を容易に測定可能であって、高精度な加工を実現させることのできる旋回軸中心測定方法を提供する。
【解決手段】まず、テーブル上の所定位置にマスター球25を設置するとともに、A軸の旋回軸中心をA(y0,z0)と仮定する。次に、テーブルをA軸周りに任意の旋回角度βだけ旋回させ、その傾斜状態(旋回角度β)においてマスター球25の中心C1(cy1,cz1)を求める。その後、さらにテーブルをA軸周りに所定角度αだけ旋回させて旋回角度γ(すなわち、γ=α+β)とし、その傾斜状態(旋回角度γ)においてマスター球25の中心C2(cy2,cz2)を求める。ここで、ベクトルAC1をα度回転させた直線がベクトルAC2となるため、旋回軸中心A(y0,z0)を演算により算出する。
(もっと読む)
配管の減肉状態推定方法及びその装置
【課題】 精密に減肉部分の状態(肉厚及び断面形状)を推定することのできる配管の減肉状態推定方法を提供する。
【解決手段】 配管内部の減肉状態を、配管内を流れる流体の圧力により生じる応力又は歪から推定する方法であって、前記配管の長手方向に沿った各位置及び/又は周方向に沿った各位置の応力又は歪を、所定間隔で配置した計測手段の計測結果から求めるステップと、前記配管の前記各位置における応力又は歪の分布から、減肉部分の位置を推定するステップと、前記減肉部分の各位置の応力又は歪を、弾性支持梁の応力分布式に当てはめ、前記減肉部分の前記各位置の肉厚を推定するステップとを有する方法とした。
(もっと読む)
ナノチューブプローブ
【目的】試料の表面平面と凹凸部の側壁及び底面の走査を容易且つ正確に行うことができることを目的とする。更に、試料の平面の凹凸部の底角部を死角となることなく正確に操作できるナノチューブプローブを提供する。
【構成】カンチレバー部2に長軸状の突出部3が設けられ、この突出部3の先端部の側部に平坦面3aが形成され、この側部平坦面3aに突出部3の軸線方向に対して先端が斜め傾斜方向に突出するようにナノチューブ4a、4bが配置され、このナノチューブ4a、4bの基端部が側部平坦面3aにコーティングあるいは融着により固定され、ナノチューブ4a、4bの先端を探針として用いる。
(もっと読む)
2自由度センサ
【課題】 小型であり、2自由度運動量を検出可能な、出力誤差の小さい2自由度センサを提供する。
【解決手段】 A、B2方向の運動量を検出する2自由度センサであって、可動部あるいは固定部に設置され、A方向から見て一定幅tAで配置される凹凸と、かつB方向から見て一定幅tBで配置される凹凸を持つ検出対象400と、前記検出対象の凹凸面に対向して設置され、B方向から見た検出面の幅がtBと等しく、かつA方向から見た幅がtAの2×m倍の対向面を持つ素子を有する第1の検出部402と、検出対象の凹凸面に対向して設置され、A方向から見た検出面の幅がtAと等しく、かつB方向から見た幅がtBの2×n倍の対向面を持つ素子を有する第2の検出部404と、前記第1、第2の検出部の出力変化からA方向運動量およびB方向運動量をそれぞれ算出する演算処理部とを有する。
(もっと読む)
形状計測装置用搬送設備
【課題】
FMレーザレーダ装置等使用して計測対象物の周囲を移動している間でも電源ライン及び信号ラインを遮断することなく常に接続される形状計測装置用搬送設備。
【解決手段】
第一台車コネクタユニットと第二台車コネクタユニットとを設置した搬送台車と、計測対象物の一方の側に敷設した第一レールと、第一レールの走行方向に対して交わる方向に走行するように敷設した第二レールと、第二レールの端部で第一レール側に設置した第一コネクタユニット架台と、第二レールを走行すると共に第二台車コネクタユニットと接続される補助台車コネクタユニットを設置した補助台車と、電源ラインと信号ラインが接続された固定側の第一中継コネクタと、第一中継コネクタに接続された第一ケーブルと、第一ケーブルに接続された第一ケーブルコネクタと、第一中継コネクタと補助台車コネクタユニットとに接続された第二ケーブルとを備える。
(もっと読む)
走査型プローブ顕微鏡
【課題】走査範囲を大きくでき、しかも高精度に試料の観察を行うことができる走査型プロ−ブ顕微鏡を提供する。
【解決手段】探針1と、探針1の位置を検出する位置検出器2と、探針1を試料Sに対して直交する方向に変位させる変位機構3と、変位機構3をZ軸に対して直交するX軸方向に移動させる走査機構4と、変位機構3をZ軸及びX軸に対して相互に直交するY軸方向に移動させる走査機構5とを備えた走査型プローブ顕微鏡である。変位機構3をZ軸方向に伸縮する圧電素子10にて構成する。走査機構4を、Y軸方向に伸縮する圧電素子11と、圧電素子11の伸縮をX軸方向の伸縮に拡大変換するリンク機構12にて構成する。走査機構5を、X軸方向に伸縮する圧電素子13と、圧電素子13の伸縮をY軸方向の伸縮に拡大変換するリンク機構14にて構成する。
(もっと読む)
走査機構
【課題】ビデオレート以上の高速での画像取得を可能にする走査型プローブ顕微鏡用走査機構を提供する。
【解決手段】走査型プローブ顕微鏡用走査機構は、可動部4とXY弾性部材とZ弾性部材7Aと7Bと固定部5とからなるXYステージと、XYステージが固定される固定台1と、可動部4をX方向に移動させるためのX圧電体2Aと、可動部4をY方向に移動させるためのY圧電体と、可動部4の上面に固定された基板11と、基板11の上面に固定された、移動対象物をZ方向に移動させるZ圧電体3と、可動部4とX圧電体2AとY圧電体のほとんどを覆うカバー9と、Z圧電体3の周囲の可動部4とカバー9の間に設けられたダンピング部材10とを備え、Z圧電体3の上端がカバー9の上面よりも高い位置に位置している。
(もっと読む)
電動パワーステアリング装置
【課題】小型かつ簡単な構成で、組み付け性に優れ、広い角度範囲で高精度の舵角センサを提供する。
【解決手段】入力軸20と出力軸21を連結するトーションバー19の捩れ角度に基づいてトルクを検出するトルクセンサ18と、該トルクセンサ18で検出されたトルクに応じて操舵補助を行うとともに、モータ7の出力位相を検出するための位相検出手段を有するモータ7と、該モータ7の出力軸に一体に連結される駆動ギア16と、該駆動ギア16との噛合によって伝達トルクを減速する従動ギア30と、該従動ギア30の位相を検出する舵角センサとを備えた電動パワーステアリング装置において、前記駆動ギア16の歯数(Z0)と前記従動ギア30の歯数(Z1)の関係を、Z1=Z0×n+P(n、P:整数)で設定し、前記モータ7の出力位相と前記従動ギア30の位相を比較しながらハンドルの操舵角を検出するようにした。
(もっと読む)
1 - 20 / 33
[ Back to top ]