
Fターム[2F069GG09]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 超音波を利用するもの (124)
Fターム[2F069GG09]に分類される特許
1 - 20 / 124
三次元測定装置
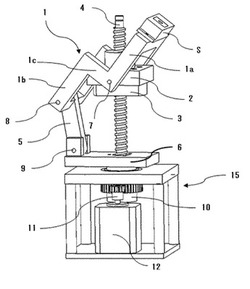
【課題】単純な機構を用いて、単一の動力装置により稼働することで、小型で汎用性が高く、死角や遅延を抑制することができる三次元走査機構を提供する。
【解決手段】動力装置からの動力が下部フランジ6,10に伝達されることで、当該下部フランジ6,10がスタッドボルト4の周囲を軸回りに回転し、当該下部フランジ6,10の軸回りの回転力がリンク機構1,5を介して上部フランジ2,3に伝達されることで当該上部フランジ2,3はスタッドボルト4の外周面を軸回りに螺旋状に回転しながら上下方向に移動可能な構成となっている。
(もっと読む)
計測装置、及び計測方法

【課題】物体のサイズを簡易かつ迅速に計測することである。
【解決手段】計測装置10は、超音波センサ111と、加速度センサ112と、地磁気センサ113と、算出部13とを有する。超音波センサ111は、所定の測定点と、当該測定点を通過する直線と面との交点との距離を測定する。加速度センサ112と、地磁気センサ113とは、上記測定点と上記交点とにより形成される角度を算出する。算出部13は、測定された上記距離、または、算出された上記角度を用いて、物体を計測する。
(もっと読む)
定形体群の立体配置状況解析方法
【課題】定形体群の立体的な配置を高精度に把握することができ、これにより定形体群の断面解析、時差比較解析などを高精度に行える定形体群の立体配置状況解析方法を提供する。
【解決手段】定形体群へ測定波を発し、3次元多点群と多数の3次元ポイントデータとを取得し、次に、3次元多点群を構成する3次元ポイントデータの中から定形体と推定される領域を順次抽出し、その後、あらかじめ取得した3次元定形体モデルを、抽出した定形体の推定領域に、画像サイズと位置とを3次元的に一致させて順次挿入する。全挿入後、定形体群の3次元CGを3Dディスプレイまたは2Dディスプレイに立体表示するので、定形体群の立体的な配置を測定誤差の影響を小さくして高精度に把握でき、定形体群の断面解析、時差比較解析などを高精度に行える。
(もっと読む)
厚さが変動する回転するブレードの位置を測定するシステムおよび方法
【課題】回転するブレード先端部と筐体の間の半径方向クリアランスの正確な測定が可能なシステムおよび方法を提供する。
【解決手段】センサは、複数の既知軸方向位置、ブレードの厚さおよびブレード先端部と筐体の間の機械的に測定された半径方向クリアランスについて回転するブレードに較正が可能である。後の作動で、ブレード通過信号の幅および回転するブレードの速度を測って回転可能なブレードの厚さを測定することが可能であり、回転可能なブレードの厚さは、センサに対する回転するブレードの軸方向位置と関連付けることが可能である。測定された軸方向位置は、それから、回転するブレードと筐体の間の正確な半径方向クリアランスを測定するため、格納されたセンサ較正データと比較される。
(もっと読む)
ガラスフィルムの巻きズレ修正装置およびその巻きズレ修正方法
【課題】ガラスフィルムの巻きズレの多少に関わらず、ガラスフィルムに破断を生じさせることなく、精度よく巻きズレを修正する。
【解決手段】制御部9が、ガラスフィルムGに割れが生じない範囲で、ガラスフィルムGの所定の単位長さ当りの巻出機構2の最大修正量を設定するとともに、ガラスフィルムGの単位長さ毎にズレ量と最大修正量とを比較し、ズレ量が最大修正量以下である場合には、その単位長さ区間でズレ量まで巻出機構2の幅方向位置を修正移動させ、ズレ量が最大修正量を越える場合には、その単位長さ区間で最大修正量まで巻出機構2の幅方向位置を修正移動させる。
(もっと読む)
移動体の障害認識方法及び障害認識システム
【課題】精度良く障害を認識することができる移動体の障害認識方法を提供する。
【解決手段】本発明の一形態に係る移動体の障害認識方法は、移動体の障害認識方法であって、移動体の路面データ取得手段で少なくとも高さデータを含む路面データを取得するステップと、取得した路面データを高さ順に並べ替えるステップと、並べ替えた路面データの変化点を抽出するステップと、変化点を境に障害を認識するステップと、を備える。これにより、精度良く障害を認識することができる
(もっと読む)
変位測定装置
【課題】保温材で被覆されていること等により配管等の構造物に直接レーザ光線などを照射することができない場合であっても、正確に、配管等の構造物の三次元変位を測定することができる変位測定装置を提供する。
【解決手段】配管等の構造物を被測定体20としてその三次元変位を測定する変位測定装置10であって、被測定体20と連結されて被測定体20の変位と同期して変位する変位検知部11と、変位検知部11に取り付けられ変位検知部11の三次元変位を、少なくとも、X方向、Y方向およびZ方向のそれぞれの変位として検出する複数の非接触式の変位検出器11x、11y、11zと、各変位検出器11x、11y、11zに検出された検出信号に基づき被測定体20の三次元変位を算出する処理部14と、処理部14で算出された変位を被測定体20の変位として表示する変位表示部15とを備えている。
(もっと読む)
フィルムの巻きずれ検査装置および検査方法
【課題】巻きずれの検査のばらつきを抑制でき、また、迅速に検査できるフィルムの巻きずれ検査装置を提供する。
【解決手段】本発明のフィルムの巻きずれ検査装置10は、巻き取り用ロール20に巻き取られる連続フィルム1の幅方向の両端部1a,1a又は片端部1aの位置を測定する測定部11と、測定部11によって測定された端部1aの位置に基づいて巻きずれを判定する判定部12とを具備する。
(もっと読む)
鉄道車両アタック角測定装置および方法
【課題】軌間外の建築限界を支障しない箇所に1つのセンサを設置するだけで車輪のレールに対するアタック角を測定することができ、複数のセンサを用いることや、高い精度でのゼロ点調整が不要な、鉄道車両アタック角測定装置および方法を提供する。
【解決手段】レールを走行する鉄道車両の車輪Wが通過する位置が測定範囲となるように設置され、測定点を通過する前記車輪Wまでの距離を連続的に測定するセンサ部12と、前記センサ部12による測定結果を受信して解析する処理部14と、を有し、前記処理部14は、前記センサ部12の測定結果から、前記車両の走行速度と、所定時間における車輪Wまでの距離の変化量を算出し、前記走行速度に前記所定時間を乗じた値と、前記所定時間における車輪Wまでの距離の変化量とから、その車輪の前記レールに対するアタック角を算出する。
(もっと読む)
落下岩塊の大きさの推定方法及び対策工の決定方法
【課題】上端部が岩盤に保持され、且つ節理を有する柱形状の岩塊に対して、安定性の定量的な評価を適切に行う。
【解決手段】節理10によって柱形状を有する岩塊20の引張強さと密度をそれぞれ測定する。測定された引張強さと密度に基づき、下記式(1)を用いて、岩盤11から落下する岩塊20の軸方向の長さを算出する。
Le=St/(ρg・sinθ)・・・・(1)
但し、Le:岩盤11から落下する岩塊20の軸方向の長さ、St:岩塊20の引張強さ、ρ:岩塊20の密度、g:重力加速度、θ:水平方向に対する岩塊20の軸方向の傾斜角度
(もっと読む)
計測治具および配管の断面形状計測方法
【課題】配管周りのスペースが狭くても、安価な構成で、配管の軸方向に直交する断面の外径を好適に計測することができる計測治具および配管の断面形状計測方法を提供する。
【解決手段】エルボ1の軸方向に直交する断面の外径を計測する計測治具5であって、エルボ1に取付可能に構成され、エルボ1の外径よりも大径となる円形の計測枠11と、計測枠11に形成され、ダイヤルゲージ30を挿入可能に、計測枠11の径方向に貫通形成した計測穴12と、を備え、計測枠11は、真円との誤差が予め計測され、計測穴12は、計測枠11の周方向に複数設けられている。
(もっと読む)
球体回転装置、球体回転方法及び球体回転装置を利用した応用機
【課題】 汎用性が大で簡単な構造で球体を満遍なく回転させることができるようにする。
【解決手段】 球体1を回転自在に受持する一対のローラ3,4と、この一対のローラ3,4をそれぞれ回転駆動するサーボモータ27,28と、前記両サーボモータ27,28を制御して前記球体1の1回転中に一対のローラ3,4の角速度を高低変化させながら一方のローラ3,4が高角速度のときに他方が低角速度となるように回転させる制御手段7とを備えている。また、前記制御手段7は、一対のローラ3,4を角速度高低変化させながら回転する途中に、球体1の少なくとも1回転における高角速度の時間長さを長短変更する回動制御機能43を有している。
(もっと読む)
港湾構造物計測装置
【課題】水中部分と水上部分、及び両者の境界部分も連続的に測定できる港湾構造物計測装置を提供する。
【解決手段】陸上に設置されたGPS基準局11と、測定機器を搭載した曳航体12と、曳航体を測定水域に沿って曳航する曳航船13とから成り、GPS基準局は、衛星S1〜S3からの電波を受信するGPS受信機14とデータリンク装置15を備え、曳航体は、GPSアンテナと、モーションセンサーと、マルチビーム測探機ソナーヘッドと、レーザースキャナーとを搭載し、曳航船は、マルチビーム測探機プロセッサーと、データリンク装置との間で位置情報を授受するインターフェイスボックスと、インターフェイスボックス及びマルチビーム測探機プロセッサーと接続されたデータ収録装置と、レーザースキャナー及びインターフェイスボックスと接続された第2データ収録装置とを備え、水中部分と水上部分と共に、境界部分も連続的に測定する。
(もっと読む)
情報処理装置およびその動作方法
【課題】 従来技術によると、髪の色の異なり等によって、音源(口唇)の位置を推定できない場合がある。
【解決手段】 上記課題を解決するために本発明に係る情報処理装置は、三次元の領域内に存在するオブジェクトと、基準となる面との距離を示す距離画像を取得し、前記距離画像に基づいて、前記距離が極値となる前記領域内の第1の位置を特定し、前記第1の位置から、前記オブジェクトが存在している方向に所定距離離れた第2の位置を特定し、前記第2の位置に基づいて、音源の位置を決定する。
(もっと読む)
筒状体形状測定装置および筒状体形状測定方法
【課題】筒状体の軸方向及び周方向の全面の外径と肉厚を同時に測定し、その内径および内外径中心線のずれである位置度を測定する装置及び方法を提供する。
【解決手段】筒状体形状測定装置10は、筒状体1の外面を軸方向および周方向に三次元座標を測定するための三次元測定用プローブと、この三次元測定用プローブと所定の距離を隔てて配置され、筒状体1の厚さを測定するための探触子と、この三次元測定用プローブおよび探触子を搭載したプローブユニット12を走査させる走査手段13,14と、走査手段13,14を制御して前記筒状体の軸方向および周方向にわたる外面を走査し、前記筒状体の周方向および軸方向の外径と肉厚とを計測し、この計測結果に基づいて前記筒状体の周方向および軸方向の内径と、前記筒状体の内外径中心線のずれである位置度を算出する三次元・厚さ測定器11を具備する。
(もっと読む)
斜面安定化システム
【課題】現斜面の状況に応じて簡易な対策工を施して、斜面崩壊の発生の恐れを僅かでも少なくするとともに、斜面崩壊が発生した場合の被害を最小限にとどめることを可能にし、また、斜面崩壊の可能性が高まった時に住民が適切な対応をすることを可能にする斜面安定化システムを提供する。
【解決手段】土塊の移動に伴って抵抗力を発揮して斜面の不安定な土塊の移動の程度を小さくすることが可能な斜面安定化構造体を斜面に施工する。この場合、1.0超、1.2未満の安全率Fsにて施工する。斜面安定化構造体を構成する斜面安定化部材体に変位センサを取り付け、当該斜面の土塊が移動した時に前記変位センサが検知した信号に基づいて危険度信号を発信する危険度信号発信手段を設け、この危険度信号発信部の発信情報を受信する危険度信号受信手段を設ける。
(もっと読む)
パターン化された構造を測定するための方法およびシステム
パターン化された構造の少なくとも1つのパラメータの測定で使用するための方法およびシステムが提供される。方法は:構造の異なる位置上の測定に対応する複数の測定された信号を含む測定されたデータと、理論的信号と測定された信号との間の関係は、構造の少なくとも1つのパラメータを示す理論的信号を示すデータとを含む入力データを提供する過程と;構造の少なくとも1つの性質を特徴付ける少なくとも1つの選択されたグローバルパラメータに基づきペナルティ関数を提供する過程と;フィッティングプロシージャの前記実行は、理論的信号と測定された信号との間の最適化された関係を決定するために前記ペナルティ関数を使用することと、構造の前記少なくとも1つのパラメータを決定するために最適化された関係を使用することとを含む、理論的信号と測定された信号との間のフィッティングプロシージャを実行する過程と;からなる。 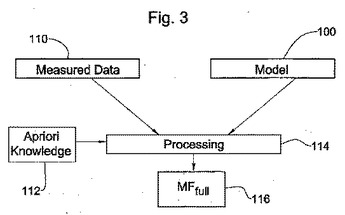 (もっと読む)
(もっと読む)
多機能座標測定機
可搬型の関節アーム座標測定機(AACMM)が、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能なアーム部であって、接続されたアームセグメントを含み、各アームセグメントが、位置信号を生成するための少なくとも1つの位置トランスデューサを含む、アーム部と、AACMMの第1の端部に装着された測定デバイスと、トランスデューサからの位置信号を受信し、測定デバイスの位置に対応するデータを提供する電子回路とを含む。可搬型のAACMMを実装することが、データが送信される送信経路を判定することによって、データが受信される送信元デバイスを特定するステップであって、送信元デバイスが、AACMMの第1の端部に取外し可能なように装着される、ステップと、送信元デバイスの特定情報に基づいてデータのデータタイプを判定するステップと、データタイプに応じてデータに対してアクションを実行するステップと、アクションを実行した結果を送信先デバイスに出力するステップとを含む。 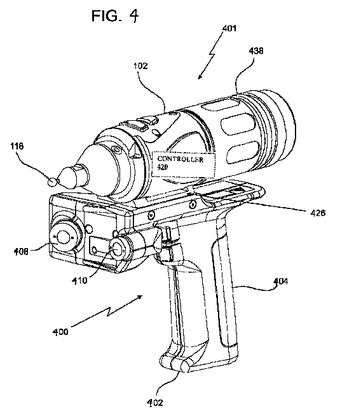 (もっと読む)
(もっと読む)
レンズ中心厚測定器およびレンズ中心厚測定方法
【課題】形状や厚みが異なる種々の被検レンズのレンズ中心厚を、被検レンズの外観品質を低下させることなく正確に測定することが容易なレンズ中心厚測定器を提供すること。
【解決手段】測距用のセンサヘッド22a,22bを有する2台の非接触型測長計2a,2bと、これら2台の非接触型測長計それぞれのセンサヘッドを互いに対向させ、各センサヘッドの測定軸MA1,MA2を互いに一致させて支持する測長計支持部3Aと、センサヘッド間に設けられ、被検レンズL1の少なくとも光学中心Lc,Ldを露出させて且つ該被検レンズの光軸Lxを測定軸に一致させて該被検レンズを保持するレンズ保持部4Aとを用いてレンズ中心厚測定器1Aを構成する。
(もっと読む)
塗装膜厚測定装置
【課題】被塗装面の領域内において、膜厚を測定するための特定位置に簡単に膜厚センサを位置づけることができる膜厚測定装置を提供する。
【解決手段】塗装膜厚測定装置10は、被塗装面に施された塗装の膜厚を測定する膜厚センサ15と、被塗装面の領域内において、膜厚センサによる測定位置を標定する距離センサ12とを備える。また、塗装膜厚測定装置10は、被塗装面の領域内に設定された特定位置を記憶する記憶部22と、記憶部22に記憶された特定位置と距離センサ12によって標定された測定位置とを比較し、両者の差分を求める比較部24と、比較部24によって求められた差分を通知する通知部20と、をさらに備えることができる。
(もっと読む)
1 - 20 / 124
[ Back to top ]