
Fターム[2F069NN21]の内容
測定手段を特定しない測長装置 (16,435) | 信号処理 (1,324) | 補間;内挿 (33)
Fターム[2F069NN21]に分類される特許
1 - 20 / 33
挿通孔の閉塞率評価システム、閉塞率評価方法及び閉塞率評価プログラム
【課題】蒸気発生器の挿通孔の閉塞率を容易に把握することができる閉塞率評価システム、閉塞率評価方法及び閉塞率評価プログラムを提供する。
【解決手段】本発明の挿通孔の閉塞率評価システムは、伝熱管と、伝熱管を通すための挿通孔が形成された管支持板とを備え、挿通孔が伝熱管が挿入された際にその周方向に形成される複数の隙間部を有する熱交換器に適用され、管支持板は長軸と短軸との比率が1.0以上2.0以下となる範囲内で3次元で楕円形状の模式図で表示され、各々の管支持板は重ならないように直列に配置され、3次元の楕円形状で表示した模式図を挿通孔の閉塞率を調査して得られた挿通孔の閉塞率の値に応じて色分けして表示する可視化処理を有することを特徴とする。
(もっと読む)
誤差画像生成方法

【課題】誤差データに基づいて自然な誤差画像を高速に生成する。
【解決手段】計測点列に対応する自由曲面データの曲面パラメータ空間上の点群を第1の点群として算出する。計測点列の各計測点とこの計測点に対応する自由曲面データ上の設計点との誤差データを算出する。第1の点群を三角形分割して第1の三角形を生成すると共に第1の点群の凸包を算出する。曲面パラメータ空間上で算出された凸包内に分散する第2の点群を設定する。第2の点群の各点の誤差データを当該各点が含まれる第1の三角形の頂点である第1の点群に対応する誤差データから補間計算により求める。第1の点群に第2の点群を加えた点群を再度三角形分割して第2の三角形を生成する。第2の三角形及びそれらの頂点の誤差データを出力装置に出力する。
(もっと読む)
移動体の障害認識方法及び障害認識システム
【課題】精度良く障害を認識することができる移動体の障害認識方法を提供する。
【解決手段】本発明の一形態に係る移動体の障害認識方法は、移動体の障害認識方法であって、移動体の路面データ取得手段で少なくとも高さデータを含む路面データを取得するステップと、取得した路面データを高さ順に並べ替えるステップと、並べ替えた路面データの変化点を抽出するステップと、変化点を境に障害を認識するステップと、を備える。これにより、精度良く障害を認識することができる
(もっと読む)
座標測定装置ならびに座標測定装置を用いて加工物の幾何形状を測定する方法
【課題】座標測定装置ならびに座標測定装置を用いて測定する方法
【解決手段】本発明は座標測定装置(10)を用いて加工物の幾何形状を測定する方法およびこの装置自体に関する。本発明によれば、測定作業は異なる種類の装置を必要とすることなく最適に実行され、これにより関連作業に対して最適利用である1つまたは複数のセンサを使用できる。
(もっと読む)
座標位置測定装置による測定エラーの修正
座標位置測定装置のためのエラー修正方法を開示する。この方法は、(i)各々が第一の物体の表面上のある位置を表す1つまたは複数の第一のデータ値を含む第一のデータセットを取得するステップと、(ii)各々が第一の物体の表面上のある位置を表す1つまたは複数の第二のデータ値を含む第二のデータセットを取得するステップと、(iii)各々が、第一のデータセットにより説明される表面と第二のデータセットにより説明される表面の間の位置差を表す1つまたは複数のエラー値を含むエラーマップを計算するステップと、を含む。第一の物体の面法線が第一のデータ値の各々によって表される各位置において既知であり、ステップ(iii)は、実質的に既知の面法線の方向の位置差を判断することによって各エラー値を計算するステップを含む。加工または測定作業は、第一の物体または第一の物体と名目上同一の物体について実行され、その表面上の位置がステップ(iii)で計算されたエラーマップを使って修正される。 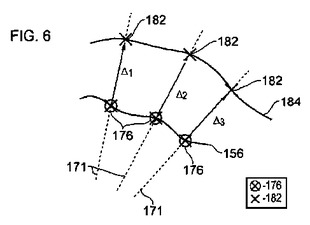 (もっと読む)
(もっと読む)
地図画像統合データベース生成システム及び地図画像統合データベース生成プログラム
【課題】移動体に固定された軸を使用せず、任意の方向にある撮影対象物の位置を取得することができる撮影対象位置特定装置、地図画像統合データベース生成装置及び撮影対象位置特定プログラムを提供する。
【解決手段】撮影装置10が撮影対象を撮影すると、制御装置16は、この画像情報とともに、撮影装置10のシャッターに同期あるいは非同期で角度距離計測器12が計測した撮影装置10の撮影位置と撮影対象との距離データと撮影装置10の撮影方向の方位角及び仰俯角を取得する。また、上記シャッターに同期あるいは非同期で、座標計測装置14から撮影装置10の撮影位置の座標情報を取得する。次に、制御装置16は、上記取得した、距離データ、方位角及び仰俯角のデータ及び座標情報のデータに基づいて、撮影対象の座標情報を演算する。また、撮影対象の画像情報及びその座標情報は、互いに関連付けて出力する。
(もっと読む)
面形状測定機、面形状測定方法、及び面形状の測定値の解析方法
【課題】軸を中心として回転対称な非球面部材における非球面の輪郭形状の測定において、軸を挟んだ対称な有効径の範囲全体を対象とすることなく、短い時間で輪郭形状の誤差を高精度に測定可能な面形状測定機、測定方法及び面形状の測定値の解析方法の提供。
【解決手段】軸を挟んだ非対称な範囲Mにおいて非球面の輪郭形状を測定し、軸を挟んだ対称な範囲Maにおける測定値と非球面の輪郭形状の設計値とを用いて所定の収束条件を満たすまで収束計算を行なう。次いで、範囲Mから範囲Maを除いた範囲Mbにおける収束計算後の測定値を、軸を挟んだ他方の側の範囲Cに軸対称に仮測定値として補完する。次いで、範囲Mと範囲Cとを合わせた範囲において、範囲Mにおける収束計算後の測定値と仮測定値と非球面の輪郭形状の設計値とを用いて所定の収束条件を満たすまで収束計算を行ない、非球面の輪郭形状の誤差を算出する。
(もっと読む)
スパイラル鋼管の製造方法および形状測定装置
【課題】スパイラル鋼管の製造工程において、鋼帯の成形・溶接後の鋼管の形状をオンラインで計測可能であるとともに、現状の設備を活用し極力簡単な設備改造で計測可能なスパイラル鋼管の製造方法および形状測定装置を提供する。
【解決手段】このスパイラル鋼管の形状測定装置は、鋼帯2を内面ローラー4および外面ローラー4を備える成形装置3を用いて管状に成形した後、鋼帯2の幅方向端面突合せ部をサブマージアーク溶接して鋼管7にするスパイラル鋼管の製造方法の溶接工程に用いられるスパイラル鋼管の形状測定装置であって、内面ローラー4を支持するマンドレル1の先端部に設けられて鋼管7の内面までの距離を非接触で測定する距離計17と、距離計17を鋼管7の周方向に回転させるモータ15と、距離計17の回転角を計測する回転角計測手段とを備えている。
(もっと読む)
位置決め装置
【課題】特定のエリアでは高い位置決め精度を確保しつつ、全体として比較的安価な位置決め装置を提供する。
【解決手段】 位置制御されるスライダ1と、このスライダ1と対向する面に磁極の歯が形成されてスライダ1と平面モータを構成するプラテン10とを備えた位置決め装置において、
スライダ1の位置を検出するレゾルバ30a〜30c(以下レゾルバ30とする。)と、
プラテン10の特定のエリアAにおけるスライダ1の位置をレゾルバ30よりも高い精度で検出するレーザ干渉計20a,20b(以下レーザ干渉計20とする。)と、
スライダ1の位置に応じてレゾルバ30またはレーザ干渉計20のいずれかの位置検出装置を選択する切替スイッチ100cと、
位置指令値および切替スイッチ100cで選択された位置検出装置で検出される位置検出値に基づいてスライダ1の位置制御を実行する位置制御部102と、
を備えたことを特徴とする位置決め装置。
(もっと読む)
構造物変位推定システム及び構造物変位推定方法
【課題】傾斜計間の梁状構造の被支持体の長さ方向に対する被支持体の傾斜角を推定することができる構造物変位推定システム及び構造物変位推定方法を提供する。
【解決手段】まくらぎ(支持体)5に支持され、1本からなる、又は接合されて1本となる梁状構造のレール(被支持体)3の長さ方向に間隔を空けてレール3に沿って設置されている、レール3の長さ方向に対する傾斜角を測定する複数個の傾斜計6と、この傾斜計6から得られる傾斜角から、傾斜計6,6間毎にレール3の長さ方向に沿った位置に対するレール3の傾斜角を推定する関数を与える演算装置7Bとを有することを特徴とする。
(もっと読む)
構造物変位推定システム及び構造物変位推定方法
【課題】計測点間隔が大きくても変位量を求めることができる構造物変位推定システム及び構造物変位推定方法を提供する。
【解決手段】まくらぎ5に支持されたレール3の長さ方向に間隔をおいて設置されている計測傾斜角を計測する複数個の傾斜計6と、レール3の計測点間部分における補間傾斜角を推定する演算装置とを有し、演算装置は、レール3上の点の長さ方向の位置を表す位置値を示す位置軸と、レール3の傾斜角を表す傾斜角値を示す傾斜角軸とからなる位置−傾斜角座標において、計測点の位置値と計測傾斜角の傾斜角値とで表される座標計測点を含み、位置値に対応した傾斜角値を与える予備補間関数を求め、計測点間の位置値と補間傾斜角の傾斜計値とで表される、予備補間関数上の暫定点を補正することによって、暫定点に代わる仮想座標計測点を求め、座標計測点及び仮想座標計測点を含み、位置値に対応した傾斜角値を与える本補間関数を求める。
(もっと読む)
モジュール式キャリブレーション方法
【課題】座標測定機の使用の際の障害を減らし、大量のキャリブレーションデータを管理する重荷を軽減する。
【解決手段】複数のサブシステム(10)から成り、サブシステム(10)の一部を個別にキャリブレーションし、その後、各サブシステム(10)に個別のキャリブレーション情報を提供し、マップ・ファイル(20)を生成し、キャリブレーションされたサブシステム(10)に関連づけられる、座標測定機を取り付ける手順に先立つ、事前のキャリブレーション手順と、前記キャリブレーション情報を保存する保存手順と、前記事前のキャリブレーション手順を通じて収集された前記キャリブレーション情報を処理する最終調整手順とから構成する。
(もっと読む)
形状計測装置および形状計測方法
【課題】形状計測を短時間に行うと共に、測定対象物のエッジ部分の外挿精度を向上することができる形状計測装置および形状計測方法を提供する。
【解決手段】測定対象物Tの形状データを取得する測定装置3と、測定装置3により取得された所定数の測定点の位置情報に基づいて、測定対象物T上の全ての点の位置情報を推定する形状推定手段を有する制御装置5と、を備えた形状計測装置1において、形状推定手段は、測定対象物Tにおける非測定点の位置情報を、所定数の測定点の位置情報と、測定点および非測定点の目標形状を表すひずみ量とから推定可能に構成されている。
(もっと読む)
リンク型変位計の計測管理方法
【課題】一の計測器の不具合や故障を迅速かつ正確に検知するリンク型変位計の計測管理方法を提供する。
【解決手段】被計測対象またはその近接位置に複数のリンク型変位計19を接続して設置する。前記リンク型変位計19は、被計測対象の変状に応答して変位可能な筒体21と、該筒体21の内部に該筒体21と同動可能に配置した変位検出部材23と、該変位検出部材23の変位を計測し、その計測デ−タを演算装置45へ出力可能な計測手段34とを備える。前記複数のリンク型変位計19により被計測対象の変状を計測するリンク型変位計の計測管理方法である。前記一のリンク型変位計19に見掛け上の角度出力が発生した際、該リンク型変位計19の両側に配置したリンク型変位計19の見掛け上の角度出力の発生の有無を基に、前記一のリンク型変位計19の不具合ないし故障を検知する。
(もっと読む)
長尺体の表面形状測定方法および表面形状測定装置
【課題】オートコリメータでは高精度測定ができない長さが1m以上の長尺状物の表面形状(真直度)を複数の変位センサを用いて測定する。
【解決手段】3本の変位センサA,B,Cをピッチ間隔p毎に直列にアーム311に固定し、テーブル上に固定された被測定物の真直度を、オートコリメータが高精度に測定できる作動範囲ではオートコリメータにより測定される値を用いて2本の変位センサA,Bにより2点法で検出された真直度値のピッチングの補正を行って初期真直度値データ列を得、オートコリメータが高精度に測定できない作動範囲における真直度の測定においては第三の変位センサCより検出される真直度値で測定基準を作り、この測定基準の測定点の値を基準にして変位センサA,Bによる2点法の出力からピッチングを検出し、それを使用してピッチング補正しながら次々に繰り返して測定範囲を広げて延長真直度値データ列を得、真直度曲線を出力する。
(もっと読む)
金属ストリップの板形状測定方法及び装置
【課題】設備空間及び設備費用が低減されて従来よりも経済性に優れ、且つ非常に簡便な金属ストリップの板形状測定方法及び装置を提供する。
【解決手段】搬送ライン上で搬送される搬送方向に沿って板幅の3倍以上の間隔をあけて2つの金属ストリップ支持手段を設置し、前記2つの支持手段間の所定の計測位置で板幅方向に沿った金属ストリップ(鋼板)Iの反り量を計測し、当該計測結果に基づいて簡単な所定の式から金属ストリップIの板幅方向の張力差Tを算出し、当該算出した金属ストリップIの板幅方向の張力差Tに基づいて別の簡単な所定の式から金属ストリップの板形状の急峻度fを求める。
(もっと読む)
変形可能な幾何学的形態のプロセスと取得デバイス
【課題】変形可能材料によって規定された幾何学的形態の取得プロセスを提供する。
【解決手段】変形可能な幾何学的形態のプロセスおよび取得デバイス。センサ(1)のセットがこの形態(曲面または表面)上に置かれる。その状況で、それぞれのセンサがこのセンサの位置でのその形態の方向を表現する信号を供給し;その形態のモデルが選択され;その信号に基づいて、モデルのパラメータが決定され、センサを隔てる距離が測定され;そしてモデルと距離測定とのパラメータに基づいて、その形態の点の空間的配置が決定される。本発明は特に、機械加工、建具、石積み加工、および構造加工の分野に適用される。
(もっと読む)
焦点調整方法および装置
【課題】加工対象のうねり量を取得し、そのうねり量に基づいて光学系に設けられた焦点調整機構を制御して加工対象上に焦点を合わせる焦点調整方法において、よりスムーズに焦点調整機構を動作させる。
【解決手段】加工対象150上に焦点を合わせる焦点調整機構を有する複数の光学系162および加工対象150との距離を測定する距離測定手段184と加工対象150とを相対的に移動させ、その移動により距離測定手段184によって上記移動方向に沿って測定された測定データに基づいて、各光学系162の位置における加工対象150のうねり量を取得し、その取得したうねり量を上記移動方向について補間することによって各光学系162の焦点調整機構の制御データを生成し、その生成した制御データに基づいて焦点調整機構を制御する。
(もっと読む)
トロリ線支持点位置検出方法及び検出システム
【課題】トロリ線の支持点位置を正確に且つ簡単に検出できる手段を提供する。
【解決手段】検測車が収集する各種検測データが入力される入力部と、入力部から送られる各種データ及び所要のパラメータファイルに基づきトロリ線の支持点位置検出処理を行う処理部と、処理部の演算結果に基づき支持点位置を出力する出力部とを備える検出システムを構築する。トロリ線偏位の検測値変化曲線Kにおいて支持点位置を含む検出範囲Rを設定し、検出範囲Rの始端側の検測値変化曲線K上の点Sと終端側の点Tとを結ぶ補完直線Lを求める。検測値変化曲線Kと補完直線Lとの軌道中心線Cに対し垂直な方向の距離DPを算出し、この値DPが最大値DUとなる距離程を求める。検測値変化曲線Kは支持点位置で頂点Uを形成するから、距離DPが最大値DUとなる位置の距離程XUとして支持点位置の距離程が求められる。
(もっと読む)
顕微鏡システム、観察方法および観察プログラム
【課題】対象物の所望の位置を容易かつ迅速に観察することができる顕微鏡システム、顕微鏡システムを用いた観察方法および観察プログラムを提供する。
【解決手段】顕微鏡システムにおいて、使用者は、原子間力顕微鏡の試料載置台上に試料を載置し(ステップS1)、光学顕微鏡による試料の観察を行う(ステップS2)。使用者は、光学顕微鏡による試料の観察時に光学顕微鏡の倍率の調整を行う(ステップS2a)。また、使用者は、光学顕微鏡による試料の観察時に原子間力顕微鏡による試料の観察対象領域の探索も行う(ステップS2b)。続いて、使用者は、ステップS2bにおいて探索した観察対象領域の中から、さらに原子間力顕微鏡による試料の観察対象領域を指定する(ステップS3)。その後、使用者は、ステップS3において指定した観察対象領域について原子間力顕微鏡による試料の観察を行う(ステップS4)。
(もっと読む)
1 - 20 / 33
[ Back to top ]