
Fターム[2F105AA06]の内容
Fターム[2F105AA06]に分類される特許
21 - 40 / 236
センサーデバイスおよび電子機器
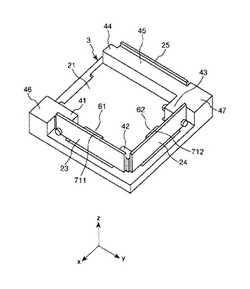
【課題】小型化を図りつつ、電子部品の位置決めを簡単かつ正確に行うことができるセンサーデバイスおよび電子機器を提供すること。
【解決手段】センサーデバイス1は、角速度センサー711が実装された第1のリジッド基板21と、角速度センサー712が実装された第3のリジッド基板23とを有する実装基板2と、実装基板2を固定する台座3とを有している。また、台座3は、x軸およびy軸に沿う第1固定面を有する基部31と、基部31上に設けられ、且つ、x軸およびy軸に沿う第2固定面およびy軸およびz軸に沿う第3固定面の少なくとも一方を有した突出部41〜44と、を含み、リジッド基板21、22、23の各々は、第1固定面、第2固定面または第3固定面に支持され、角速度センサー711、712は、検出軸が互いに交わっている。
(もっと読む)
モジュールおよび電子機器

【課題】信頼性を高め、小型薄型で、且つ優れた検出精度を発揮することのできるモジュールおよび電子機器を提供すること。
【解決手段】モジュール1は、センサー素子4と、実装面を複数備え、且つ隣接する実装面の間が折り曲げ可能な実装基板2と、固定面31〜35を複数備えた支持部材3と、を有し、センサー素子4は、実装面の少なくとも1つに実装され、実装面の各々は、固定面31〜35の各々に沿って配置され、センサー素子4が支持部材3側に配置されている。
(もっと読む)
保持部材、モジュールおよび電子機器
【課題】小型化を図りつつ、モジュールの位置決めを簡単かつ正確に行うことができる保持部材、モジュールおよび電子機器を提供すること。
【解決手段】保持部材7は、モジュール1の保持の位置を決めるアライメント部741〜744を有し、アライメント部741〜744は、モジュール1を固定する載置面741a〜744aを有している。保持部材7の中心に対し平面視で互いに直交する第1軸J1および第2軸J2により、保持部材7を第1〜第4の領域S1〜S4に区分けしたときに、アライメント部741〜744は、領域S1〜S4にそれぞれ1つずつ設けられている。
(もっと読む)
自己診断機能を有する角速度センサ
【課題】本発明は、音叉型振動子を発振回路を共用として自己診断を行うことにより簡略化及び小型化することを目的とする。
【解決手段】本発明による自己診断機能を有する角速度センサは、音叉型振動素子(1)に駆動電極(9)と検出電極(20)と自己診断用電極(6,7)を設け、各自己診断用電極(6,7)と駆動電極(9)を一対のスイッチ(SW1,SW2)を介して1個のみの発振回路(10)を共用として選択的にON/OFFすることにより、音叉型振動子(1)の各アーム部(2,3)を対称駆動又は非対称駆動とする構成である。
(もっと読む)
微小電気機械システム
【課題】応力に起因したMEMSの固有振動数の変動を抑制することにより、MEMSの検出感度の変動による測定精度の劣化を抑制することができる技術を提供する。
【解決手段】まず、半導体基板2の変形によって固定部3a〜3dは半導体基板2のy方向において外側方向に変位する。可動体5は、半導体基板2から浮いた状態で配置されているので、半導体基板2の変形の影響は受けずに変位しない。したがって、梁4aには引張応力(+σ1)が発生し、梁4bには圧縮応力(−σ2)が発生する。このとき、梁4aと梁4bを組み合わせたバネ系を考えると、梁4aに働く引張応力に起因するバネ定数の増加と、梁4bに働く圧縮応力に起因するバネ定数の減少が互いに相殺する。
(もっと読む)
キャリブレーション方法、情報処理装置及びキャリブレーションプログラム
【課題】ジャイロの零点オフセットを簡易にキャリブレーションすることを課題とする。
【解決手段】サーバ装置30は、移動体端末10が第1の地点から位置または角度の誤差が特定量となる第2の地点へ移動した場合に、モーションセンサ11の出力を用いたデッドレコニングにより第2の地点で得られる位置または角度と特定量との差分を特定する。さらに、サーバ装置30は、特定結果として得られた差分から、当該移動体が静止状態である場合にジャイロ11bによって出力されるセンサ値である零点オフセットを算出する。
(もっと読む)
姿勢推定装置
【課題】 異なる複数のセンサの各出力に対し、各センサの線形動特性の逆伝達関数を用いて補償すると共に、この逆伝達関数に対応したフィルタを施し、最終的に姿勢変換を行うようにして、姿勢推定を適切且つ高精度に行える姿勢推定装置を提供する。
【解決手段】 角速度センサ10と傾斜計20の各逆モデルを動特性補償部分と姿勢変換部分とに分け、センサ動特性については近似線形特性として伝達関数を同定し、その逆伝達関数を用いて特性を補償すると共に、逆伝達関数に対応してフィルタを設計し、且つ出力信号への姿勢変換演算の前にフィルタを施すようにすることから、逆伝達関数を用いた特性補償で、有効周波数領域の拡大を図りつつ、逆伝達関数とフィルタの伝達関数の積についてはプロパーな伝達関数とすることができ、確実な演算処理で姿勢推定が実行でき、複数のセンサを用いる相補フィルタの手法で精度のよい姿勢推定を行える。
(もっと読む)
電子デバイスの製造方法
【課題】電子デバイスの製造方法において、封止用のキャビティ内の真空度を高めることを目的とする。
【解決手段】シリコンを含む第1の基板11の一方の主面11a側に可動部14aを形成する工程と、シリコンを含む第2の基板20の一方の主面20c側にキャビティ20bを形成する工程と、第1の基板11と第2の基板20の少なくとも一方の主面に、酸素及び窒素のいずれかの原子を含むプラズマを照射する工程と、プラズマを照射した後、キャビティ20bを可動部14aに対向させた状態で、第1の基板11と第2の基板20の各々の主面同士を真空中で接合することにより、キャビティ20b内を真空に保ちつつ、可動部14aを第2の基板20で封止する工程と、封止の後、シリコンと上記原子とが反応する温度以上の温度に第1の基板11と第2の基板20をアニールする工程とを有する電子デバイスの製造方法による。
(もっと読む)
複合センサ
【課題】電位差によって生じる静電力の影響を抑え、S/N比の低下やセンサ感度の変動を防止できる複合センサを提供することを目的とする。
【解決手段】本発明に係る複合センサは、第1可動部および第2可動部と、これらの周辺に配置されている第1ダミー部および第2ダミー部を、積層基板の層内に形成して備えている。第1ダミー部と第2ダミー部は電気的に分離されており、第1可動部と第1ダミー部には第1電位が印加され、第2可動部と第2ダミー部には第2電位が印加される。
(もっと読む)
ジャイロ用ゼロ点補正方法及び装置
【課題】ジャイロ出力のゼロ点補正値を停車時のジャイロ出力信号によって得る時、ターンテーブルに乗って回転しているときのジャイロの出力をゼロ点補正値としないようにジャイロ出力の閾値を設定する際に、高性能のジャイロを必要とせず、また車両停止時に方位マークが回転し続ける問題を解決する「ジャイロ用ゼロ点補正方法及び装置」とする。
【解決手段】車両の停止判定時に、ジャイロの出力によってそのゼロ点補正値を算出するとき、ジャイロの標準出力値の上下に、車両がターンテーブルに乗って回転している時のジャイロの出力以内の範囲に閾値を設定する。車両の停止判定時のジャイロの出力が、閾値の範囲外にあることを検出したときから継続して閾値を超えている経過時間を算出し、経過時間が1分等の所定時間を超えたとき、車両はターンテーブルに乗っていなかったと判定して、車両の停車判定開始時のゼロ点補正値を採用する。
(もっと読む)
MEMSセンサおよびその製造方法、ならびにMEMSパッケージ
【課題】互いに噛み合う櫛歯状の第1電極および第2電極の大きさのばらつきを少なくでき、センサの検出精度を向上できるMEMSセンサおよびその製造方法を提供すること。
【解決手段】ベース基板7をエッチングすることにより、柱状部29およびベース部30を形成する。次に、当該柱状部29およびベース部30を熱酸化することにより、これらを絶縁膜に変質させる。これにより、柱状部29からなる絶縁層85およびベース部30の表層部からなるベース絶縁層21を形成する。次に、ベース絶縁層21上にポリシリコン層22を形成し、当該ポリシリコン層22およびベース絶縁層21の積層構造をエッチングして、Z固定電極71およびZ可動電極72の形状に成形する。同時に、それらの間にトレンチ50を形成する。そして、当該トレンチ50の底部を等方性エッチングすることにより、ベース絶縁層21直下に凹部20(空洞23)を形成する。
(もっと読む)
MEMSセンサおよびその製造方法、ならびにMEMSパッケージ
【課題】上部電極の直下に下部電極を簡単に形成でき、上部電極と下部電極との短絡を防止し、センサの検出精度を向上できるMEMSセンサおよびその製造方法を提供する。
【解決手段】ベース基板7上に駆動用電極22を選択的に形成し、駆動用電極22を被覆するように、SiO2からなる電極被覆膜23を形成する。次に、電極被覆膜23上に、犠牲ポリシリコン層52および犠牲酸化膜53を順に形成する。次に、犠牲酸化膜53上に、ポリシリコン層26を形成し、エッチングにより、固定電極27、可動電極28およびコンタクト電極29の形状に成形する。同時に、それらの間にトレンチ56を形成する。次に、トレンチ56の底部をさらに掘り下げて、犠牲酸化膜53から犠牲ポリシリコン層52を露出させる。そして、犠牲ポリシリコン層52を完全に除去することにより、固定電極27の櫛歯部32および可動電極28の櫛歯部39の直下に空洞37を形成する。
(もっと読む)
産業用ロボットの速度位置解析システム及び産業用ロボットの速度位置検出装置
【課題】従来の産業用ロボットの速度位置解析システムは、ドリフト安定度の高い慣性センサからの慣性信号に基づいて産業用ロボットの位置等を検出するように構成しているので、高価な慣性センサが必要となり、部品コストの増大の要因になっている。
【解決手段】本発明による産業用ロボットの速度位置解析システムでは、移動制御部20は、産業用ロボット1を静止させているときにデータ蓄積部30に対して静止情報20aを入力する。データ蓄積部30は、静止情報20aを検出したときの慣性信号11aのデータに関連付けて静止情報20aを記憶する。速度位置後解析部31は、静止情報20aが関連付けられている慣性信号11aのデータに基づいて求められる産業用ロボット1の速度をゼロとする補正値を求めて、求めた補正値を用いて慣性信号11aのデータを補正して産業用ロボット1の速度及び位置を求める。
(もっと読む)
静電容量型ジャイロセンサ
【課題】小型化を実現でき、検出感度に優れる静電容量型ジャイロセンサを提供する。
【解決手段】内部に空洞10を有する半導体基板2の表面部(上壁11)に、第1ベース部63と、第1ベース部63と一体をなす櫛歯状の第1櫛歯部64とを含むZ固定電極61を形成する。また、当該上壁11に、第2ベース部65と、第2ベース部65と一体をなし、Z固定電極61の第1櫛歯部64に対して間隔を空けて噛み合う第2櫛歯部66とを含み、Z固定電極61に対して上下動可能なZ可動電極62を形成する。そして、ベース部63の対向部84には、第1駆動部18を形成し、この第1駆動部18に櫛歯状に噛み合うように、Z可動電極62の先端部70に、櫛歯状の第2駆動部19を形成する。
(もっと読む)
慣性計測装置
【課題】高精度の慣性計測装置を提供する。
【解決手段】慣性計測装置1は、被測定物に働く重力加速度を検出可能な加速度部51と、被測定物の回転運動を検出可能な複数の角速度センサを有する角速度部52、53と、複数の処理機能が組み込まれた演算処理部54とを備えている。角速度部52にはXYZ軸のそれぞれの角速度を検出可能な3つの角速度センサ、角速度部53には3つの角速度センサの検出軸とは異なる軸の角速度を検出可能な1つ以上の角速度センサが含まれている。演算処理部54では、これら4〜6つの角速度センサから、重力軸と最も平行な軸を検出軸とする角速度センサを除いて、重力軸と最も平行な軸の角速度が算出される。
(もっと読む)
センサー装置、電子機器及び角速度センサーのオフセット補正方法
【課題】補正タイミングを自己判定して角速度センサーのオフセット補正を行うことができるセンサー装置、電子機器及び角速度センサーのオフセット補正方法を提供すること。
【解決手段】初期状態検出部210は、加速度センサーの出力に基づいて加速度を算出し、算出した加速度と重力加速度が略一致する状態を初期状態として検出する。角速度算出部220は、初期状態における姿勢情報に基づいて初期状態における各検出軸方向の軸ベクトルを算出し、当該軸ベクトルと各検出軸方向の加速度成分と当該加速度成分の時間変化とに基づいて任意の軸回りに回転する角速度を算出する。角速度判定部230は、角速度算出部220が算出した角速度が略0である場合に、角速度センサーに加わる角速度が0であると判定する。オフセット補正部40は、角速度センサーに加わる角速度が0であると判定された時に、角速度センサーの出力のオフセットを補正する。
(もっと読む)
半導体基板のエッチング方法および静電容量型MEMSセンサの製造方法
【課題】エッチングパターンの形状または大きさによらずに、正確に制御された深さの凹部を形成することができる半導体基板のエッチング方法を提供すること。
【解決手段】半導体基板3をエッチングするに際し、まず、それぞれ独立に区画されたエッチング領域87に対向する位置に同一パターンの開口88を多数有するレジスト59をマスクとして、異方性の深掘り反応性イオンエッチングする。これにより、半導体基板3の表面部に、深さがほぼ等しく揃った凹部89が多数形成される。次いで、多数の凹部89を区画する半導体基板3の側壁90を、半導体基板3の表面に平行な横方向にエッチングして除去する。
(もっと読む)
物理量センサ
【課題】高精度の物理量検出信号を得ることを可能とした物理量センサを提供する。
【解決手段】外部から印加された物理量を電気信号に変換する振動子20と、振動子を発振させる発振回路30と、振動子からの被検波信号を発振回路からの検波信号に基づいて検波する検波回路60を有する物理量センサ100において、検波回路の前段で発振回路からの検波信号及び振動子からの被検波信号の何れか一方の信号をΔΣ変調し且つ変調信号V26を出力するΔΣ変調器70と、出力電圧が可変な可変電圧源と、可変電圧源の出力電圧を制御する制御部を更に有し、ΔΣ変調器は出力電圧を基準として作成されたフィードバック信号V22を用いてΔΣ変調を行うことを特徴とする物理量センサ。
(もっと読む)
角速度センサ
【課題】本発明は、簡単な回路構成を用いながら電荷/電圧変換およびバッファアンプの飽和を防止することにより、0点変動を低減させることができ、これにより、角速度の測定精度の向上を図ることができる角速度センサを提供することを目的とするものである。
【解決手段】本発明の角速度センサは、検出部26a,26b,26c,26dを可撓部22の内周部から外周部にわたって設けるとともに、前記検出部26a,26b,26c,26dの幅を質量部23の中心からの距離に応じて大きくすることにより、検出部26a,26b,26c,26dのコリオリ力に起因しない電荷分をキャンセルまたは極めて小さくなるようにしたものである。
(もっと読む)
慣性力センサ
【課題】トリミングに起因した音叉アームの破損を抑制した慣性力センサを提供することを目的とする。
【解決手段】慣性力を検出する音叉型の振動子10と処理回路とを備え、振動子10は、2つの音叉アーム12、13と、これらを連結する基部14とを有し、音叉アーム12、13の一方の面は電極15を形成した電極面16とし、他方の面はトリミング部17を形成したトリミング面18とし、トリミング部17は音叉アーム12、13の角部19を除いた部分に形成した構成である。
(もっと読む)
21 - 40 / 236
[ Back to top ]