
Fターム[2F129BB21]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 相対位置測位 (18,278) | 方位センサ (3,052)
Fターム[2F129BB21]に分類される特許
601 - 620 / 3,052
ナビゲーション装置及びプログラム
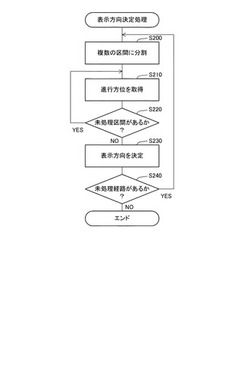
【課題】 経路案内においてヘディングアップ表示を好む運転者にとって、違和感の少ない地図表示を実現し、しかも、走行中における地図の回転を抑えた地図表示を行うナビ−ゲーション装置を提供する。
【解決手段】 目的地が設定され、経路探索が行われた後、対象経路が特定される。そして、対象経路毎に、地図表示の向きが決定される。具体的には、対象経路を複数の区間に分割され(S200)、各区間における「車両の進行方位」が取得されて(S210)、車両位置から取得された「車両の進行方位」のうちで最も多く取得された方位が画面上辺に対して垂直方向上向きと合致するように地図表示が行われる。また、経由地がある場合には、経由地で分割された経路が「対象経路」とされる。
(もっと読む)
車両案内装置、車両案内方法、及び車両案内プログラム

【課題】車線の交通状況に応じて車線変更を容易とする案内を行うことができる、車両案内装置、車両案内方法、及び車両案内プログラムを提供すること。
【解決手段】車両案内装置10は、所定の車線における車間距離であって、車線変更の基準地点までに存在する車両3相互間の車間距離を特定する車間距離特定部12aと、特定した車間距離に基づき、基準地点に至るまでに所定の車線へ車線変更すべき推奨区間を特定する推奨区間特定部12bと、特定した推奨区間に基づいて所定の車線への車線変更に関する案内情報を出力する通信部11とを備える。
(もっと読む)
充電状態報知装置およびナビゲーション装置
【課題】車両の走行の動力源となるバッテリを充電する際に、充電開始後にユーザが車両を離れた場合であっても、目標とする蓄電量が実現したことをユーザに明確に通知すると共に、その通知のために要する電力を低減する。
【解決手段】バッテリへの充電時に車両の主電源がオフになった場合、制御部49がスリープモードに移行し、比較部48は、バッテリの現在の蓄電量が目標蓄電量以上となったか否かを判定する。また、バッテリの現在の蓄電量が目標蓄電量以上となったと比較部48が判定すると、比較部48が制御部49をスリープモードからアクティブモードに移行させ、制御部49は、アクティブモードに移行したことに基づいて、通信部45を制御して、バッテリの蓄電量が目標蓄電量に到達したことをユーザ端末に通知する。
(もっと読む)
測位装置、位置データの記録方法およびプログラム
【課題】 移動体の移動速度が様々に変化する場合でも、常に適切な間隔で位置データを記録していくことのできる測位装置、位置データの記録方法およびプログラムを提供する。
【解決手段】 移動体に保持されて現在位置の測定が可能な測位手段と、この測位手段による現在位置の測定を所定間隔で行わせる測位制御手段(S1〜S11)と、前記測位手段の測定によって順次取得される一連の位置データのうち一部の位置データの記録を省いて一部の位置データの記録を行う記録制御手段(S12〜S16)とを備え、移動体の移動速度が大きいときには位置データの記録を省く割合が大きくなり、前記移動体の移動速度が小さいときには位置データの記録を省く割合が小さくなるように、前記一連の位置データの記録制御を行う。
(もっと読む)
歩行計測装置、歩行計測方法およびプログラム
【課題】 歩行体の左右の歩行動作に非対称性があっても、正確な移動方向の計測が可能な歩行計測装置、歩行計測方法およびプログラムを提供する。
【解決手段】 歩行体に保持されて移動方向に関する物理量を検出する検出手段(ステップS1)と、この検出手段の検出により得られる前記物理量を表わす検出データのうち、左足を踏み出す歩行動作の際に得られる検出データと、右足を踏み出す歩行動作の際に得られる検出データとの何れか又は両方を、左右の歩行動作の大きさの違いに基づく前記検出データの差異を均衡させる方向に補正する補正手段(S9〜S11)と、この補正手段により補正された前記検出データに基づいて前記歩行体の移動方向を算出する移動方向算出手段(S12,S13)とを備えている。
(もっと読む)
情報提示装置
【課題】精度がより高く、且つ、実施がより容易であるとともに、コスト的な無駄をより抑えることを可能にしながらも、ドライバにとっての快適性をより損ないにくい情報提示装置を提供する。
【解決手段】注意喚起表示や警告表示にドライバが気づいたか否かの判定を行う行動判定部30を備え、情報提示制御部27は、行動判定部30で肯定判定を行ったことをもとに、注意喚起表示や警告表示の減衰表示への変化を表示部21に行わせ、行動判定部30は、表示部21に表示された注意喚起表示や警告表示にドライバが気づいた場合にドライバが行うスイッチ操作や運転操作によって生じる信号であるドライバ行動確認情報や車両情報をもとに上述の判定を行う。
(もっと読む)
ナビゲーション装置
【課題】車載された状態でナビゲーション装置が使用されている場合に、車載時最終位置情報を保存し、これを再度車載された状態で利用できるナビゲーション装置を提供する。
【解決手段】ナビゲーション装置1は、ナビゲーション装置1の現在位置を所定の時間間隔で検出する現在位置検出手段11と、現在位置検出手段11が検出した現在位置の情報を、随時記憶する現在位置記憶手段16と、制御手段10とを備え、制御手段10は、ナビゲーション装置1が車両から取り外され、再度車両に取り付けられたことを判別すると、現在位置記憶手段16に最後に記憶された現在位置の情報を、車載時最終位置として特定し、該車載時最終位置を、ナビゲーション装置1が再度車両に取り付けられた時の現在位置とする。
(もっと読む)
携帯ナビゲーションシステム
【課題】GPS電波が届きにくい場所でも利用でき、位置検出精度が高い携帯ナビゲーションシステムを提供する。
【解決手段】予め定められた位置に、互いに周波数が異なる交流磁界を発生する少なくとも3個の磁界発生源4a〜4cが配置されている。携帯端末2に搭載されている3軸磁気センサ3aを用いて、交流磁界を検出する。そして、交流磁界を周波数毎に分解し、周波数毎の交流磁界の強さを算出する。この値から、携帯端末2から磁場発生源までの距離を算出し、携帯端末2の位置を特定する。これにより、GPS電波が届きにくい場所でも、ユーザ6の進行開始位置を精確に特定することが可能になる。また、ユーザ6が移動した場合には、自律航法によってユーザ6の現在位置を特定する。
(もっと読む)
ナビゲーション装置
【課題】ユーザがおおよそ行きたい地域しか定めていない場合にユーザの意図に沿った経路案内を行う「ナビゲーション装置」を提供する。
【解決手段】メニュー項目「表示地図エリアに行く」のユーザによる選択操作が発生したならば(b1)、地図上のカーソル401の位置が重なる地点を目的地421に設定し、表示されている地図の地理的範囲を目的エリア422に設定し、目的エリアとその周辺を囲む参照エリア423を設定する(b2)そして、現在位置が参照エリア内の位置となったならば目的地の再設定を促す。
(もっと読む)
ナビゲーションシステム、ナビゲーション装置、ナビゲーションサーバ、および、パルス移動距離学習方法
【課題】車速パルスの1パルスあたりの移動距離を実際の正確な値に近づけるまでの時間を短縮することができる、ナビゲーションシステム、ナビゲーション装置、ナビゲーションサーバ、および、パルス移動距離学習方法を提供することを課題とする。
【解決手段】本発明は、予め記憶部に記憶された車速パルスの1パルスあたりの移動距離と、任意の2地点間において検出された車速パルスのパルス数と当該2地点間の距離に基づいて算出された1パルスあたりの移動距離と、の差分を算出して記憶部に格納し、記憶部に格納された差分に基づいて統計処理による学習により1パルスあたりの移動距離を補正する。
(もっと読む)
ナビゲーションシステム、ナビゲーション装置、ナビゲーションサーバ、および、ネットワークデータダウンロード方法
【課題】記憶領域の容量等の理由によりマップマッチング用のネットワークデータを保持していない場合においても、探索された経路上の分岐部分のリンクデータを経路データと一緒に受信することで、マップマッチングをしなくてもオフルート判定を素早く行うことができるナビゲーションシステム、ナビゲーション装置、ナビゲーションサーバ、および、ネットワークデータダウンロード方法を提供することを課題とする。
【解決手段】本発明は、ナビゲーションサーバにて、案内経路を探索し、記憶部から案内経路上の分岐点にて当該案内経路と分岐する道路区間であるリンクのリンクデータを抽出し、案内経路データおよび当該リンクデータをナビゲーション装置へ送信し、ナビゲーション装置にて、当該リンク上に現在位置が存在すると判定した場合、オフルートであると判定する。
(もっと読む)
地点検索装置及びプログラム
【課題】入力された全ての検索語を検索条件として候補施設名を抽出することが可能となる地点検索装置及びプログラムを提供する。
【解決手段】入力された検索語の包含関係に従って検索語の検索順番を設定する。そして、複数の施設名のキーワードから構成された読み毎に、この検索順番に従って1番目の検索語から順番に、キーワードフラグが設定されていないキーワードのうちの該検索語と前方一致する先頭キーワードのキーワードフラグを設定する。その後、複数の施設名からキーワードフラグが設定されたキーワードの個数が包含関係を設定した検索語の個数と等しい読みに対応する施設名を候補施設名として抽出し、出力する。
(もっと読む)
測位装置及び測位方法
【課題】様々な環境下で測位を行う際、測位する環境によっては過去に経験した測位精度の低下を繰り返してしまう恐れがある。
【解決手段】位置情報信号を受信して現在位置を測位するリファレンス測位手段11と、自律航法により現在位置を測位するセンサー測位手段12と、リファレンス測位手段11及びセンサー測位手段12において測位したときの測位環境を示す推定ゲイン情報14を記憶する記憶部13とを有する。リファレンス測位手段11及びセンサー測位手段12は、記憶部13に記憶されている推定ゲイン情報14に基づいて現在位置を測位する。
(もっと読む)
ワイヤレス信号を使用した位置判断
移動局は、衛星測位システム(SPS)拡張デッドレコニングベース位置推定値を改善するために、ワイヤレス信号の測定されたパラメータを使用してそれの位置を判断する。移動局は、現在の位置を推定するためにSPS拡張デッドレコニングを使用する。移動局は、ワイヤレス信号を受信し、たとえば、受信信号強度および/または往復時間を測定し、それをデータベースと比較してワイヤレス信号に基づく位置推定値を導出する。SPS拡張デッドレコニング位置推定値とワイヤレス信号に基づく位置推定値とは、次いで、対応する信頼性レベルを使用して融合され得る。データベースは、移動局において生成され、記憶され得る。別の実施形態では、データベースは、移動局によってアクセスされ得るオンラインサーバにおいて生成され、記憶される。 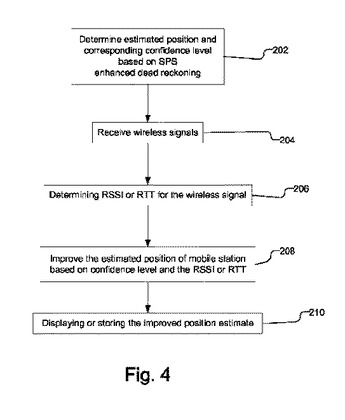 (もっと読む)
(もっと読む)
測位装置及び測位方法
【課題】様々な環境下で測位を行う際、測位する環境によっては過去に経験した測位精度の低下を繰り返してしまう恐れがある。
【解決手段】位置情報信号を受信して現在位置を測位するリファレンス測位手段11と、自律航法により現在位置を測位するセンサー測位手段12と、リファレンス測位手段11及びセンサー測位手段12において測位したときの測位環境を示す推定ゲイン情報14を記憶する記憶部13とを有する。リファレンス測位手段11及びセンサー測位手段12は、記憶部13に記憶されている推定ゲイン情報14に基づいて現在位置を測位する。
(もっと読む)
地点検索装置及びプログラム
【課題】名称リストを展開するメモリ容量の増大を抑止することができると共に、検索を高速で行い、応答性の低下を防止することが可能となる地点検索装置を提供する。
【解決手段】「分割単位」、施設名の読みを記憶する「読み」、「施設名」、及び重複抽出抑止情報としての「無効文字数」から構成された施設名データテーブル51を施設名DB27に格納している。「分割単位」には、施設名の読みを構成するキーワードと前方一致する平仮名が、50音順に1文字以上記憶されている。「読み」には、各「分割単位」に記憶される平仮名と前方一致するキーワードを含む施設名の読みが記憶されている。「施設名」には、施設名が施設名の読みに対応して記憶されている。そして、CPU41は、検索語と前方一致する平仮名が記憶された「分割単位」内の各施設名に対応する「無効文字数」に基づいて候補施設名を取得する。
(もっと読む)
ユーザ端末装置、その位置提供方法及びその経路案内方法
【課題】本発明の目的は、ターゲット認識情報と位置情報とを用いて経路案内を提供することができるユーザ端末装置、その位置提供方法及びその経路案内方法を提供することにある。
【解決手段】ユーザ端末装置が開示される。ユーザ端末装置は、ユーザ端末装置の位置を示す位置情報を生成する位置情報生成部と、ターゲットを認識するためのターゲット認識情報を生成する認識情報生成部と、相手端末との通信を行う通信部と、ターゲット認識情報が予め設定された第1基準情報と符合するかを検証し、検証に成功すると相手端末にターゲット認識情報及び位置情報を伝送するように通信部を制御し、検証に失敗するとターゲット認識情報が予め設定された第2基準情報と符合するかを検証する制御部と、を含む。これにより、ユーザ端末装置で目的地までの移動経路を容易に案内することができるようになる。
(もっと読む)
案内制御装置、案内制御方法、及び案内制御プログラム
【課題】車載機の制御がどのような情報に基づいて実行されたのかを運転者が認識可能となるように、当該車載機の制御に関する案内の出力制御を行うことができる、案内制御装置を提供すること。
【解決手段】案内制御装置10は、車両1の状態を特定する車両状態情報に基づく車両状態条件、及び/又は車両1の走行環境を特定する走行環境情報に基づく走行環境条件の成否に基づいて車載機20の制御を行う車両1に搭載された案内制御装置10であって、車両状態条件の成否を判定する車両状態条件判定部11aと、走行環境条件の成否を判定する走行環境条件判定部11bと、車載機20の制御が行われた場合に、車両状態条件判定部11aによって判定された車両状態条件の成否と、走行環境条件判定部11bによって判定された走行環境条件の成否とに基づく案内の出力制御を行う案内制御部11cとを備える。
(もっと読む)
方位検出装置、方位検出方法および方位検出プログラム
【課題】地磁気を検出して算出された方位情報の精度を判定する。
【解決手段】移動中の方位角を検出する方位検出装置において、地磁気を検出して方位情報を求める磁気センサ2と、この磁気センサ2の移動方向と交差する方向の加速度を検出する加速度センサ3と、この加速度センサ3の検出した加速度データと磁気センサ2の求めた方位情報との整合性を判断し、その整合性の判断により移動する進行方向を決定する方位角決定処理部4とを有する。
(もっと読む)
方位角計測装置
【課題】ホール素子を用いて検出された地磁気に基づいて、方位を計測する。
【解決手段】補正値記憶部7には、x軸ホール素子HExおよびy軸ホール素子HEyの基準値Lx、Lyが記憶され、補正計算部6は、x軸ホール素子HExおよびy軸ホール素子HEyの出力増幅値Dx、Dyから回路的にキャンセル可能なオフセットを減じ、さらに基準値Lx、Lyを減算することにより、地磁気の各軸成分に比例した値α、βだけを取り出す。
(もっと読む)
601 - 620 / 3,052
[ Back to top ]