
Fターム[2F129BB33]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正対象 (3,438) | 位置 (2,582)
Fターム[2F129BB33]に分類される特許
361 - 380 / 2,582
分岐判断装置
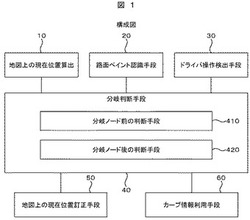
【課題】分岐判断の際、分岐判断が誤っていた場合でも、その後ドライバの操作により、進路を訂正する。
【解決手段】現在位置情報及び分岐路情報を出力する現在位置算出手段10と、道路上の路面ペイント情報を認識して、分岐線横切情報を出力する路面ペイント認識手段20と、ドライバ操作情報を検出するドライバ操作検出手段30と、現在位置情報と分岐路情報と分岐線横切情報とドライバ操作情報とに基づいて自車両が分岐路に入ったか否かを判断する分岐判断手段40と、を有し、分岐判断手段40は、分岐線横切情報に基づいて分岐判断を行う第1の分岐判断手段と、ドライバ操作情報に基づいて分岐判断を行う第2の分岐判断手段と、を有し、分岐判断手段40は、現在位置算出手段にて、現在位置情報と分岐路情報から、自車両の前方に分岐路があると判断された場合、第1の分岐判断手段と第2の分岐判断手段によって分岐判断を実行する。
(もっと読む)
ナビゲーション装置

【課題】電力供給をノーマリーオフして電力消費を低減し、かつ起動した際にナビゲーション処理結果を迅速に提供できるナビゲーション装置を提供する。
【解決手段】カーナビSoC2及び出力部6への電力供給をノーマリーオフするとともに、起動条件が示す起動タイミングでカーナビSoC2に電力供給してカーナビSoC2を起動する起動条件管理部5とを備え、カーナビSoC2が、電力供給されて起動すると、比較データが示す電力遮断前の地図情報の所定範囲に、カーナビSoC2が起動した時点の自車位置が含まれるか否かに応じて描画用データの使用可否を判定し、使用可と判定すると、当該描画用データを出力部6に表示し、使用不可と判定すると、地図情報取得部9から読み出したカーナビSoC2が起動した時点の自車位置を含む地図情報の描画用データを出力部6に表示する。
(もっと読む)
カーナビゲーション装置
【課題】正しい現在位置を算出できるカーナビゲーション装置を提供する。
【解決手段】車線変更することなく走行した場合には分岐路130に至ることとなる特定車線120を車両が走行して、そのまま分岐路130へ向かった場合、分岐路130に係る脱出リンク171上に表示候補点が算出されると、当該表示候補点のエラーコスト値ecの算出時に係数γの値を低減する。その結果、当該表示候補点の信頼度trstが高まるので、正しい現在位置が算出されやすくなる。
(もっと読む)
測位システム、通信装置、及び測位方法
【課題】測位機能を有する情報処理装置の車載時の自律航法による位置情報の精度を向上させることができる測位システム、通信装置、及び測位方法を提供する。
【解決手段】測位システム10は、車両300に設けられたコネクタ308と嵌合するコネクタ110と、上記コネクタを介して、上記車両から上記車両の車速情報又は進行距離情報を受信する車両通信部102と、上記車両通信部により取得した上記車速情報又は進行距離情報に基づく伝送情報を、情報処理装置に送信する情報処理装置通信部104と、を有する通信装置100と、上記通信装置から上記伝送情報を受信する通信部214と、上記車速情報又は進行距離情報に基づいて現在位置を算出する位置算出部242と、を有する情報処理装置200と、を有する。
(もっと読む)
表示装置、および、プログラム
【課題】演算負荷に応じて画像の切り替えを適切に行うことが可能な表示装置、および、プログラムを提供する。
【解決手段】ディスプレイに画像を表示し(S101)、切替ボタンが選択されたと判断された場合(S102:YES)、制御部10のCPUの演算負荷に基づき、画像を切り替える際の基準となる画像の分割数を決定し(S104、S105)、決定された分割数に基づいて画像を分割し、現在表示されている画像から他の画像への切り替えを行う(S106)。これにより、制御部10のCPUの演算負荷に応じて決定された分割数に基づいて画像を分割し、ディスプレイに表示される画像を切り替えるので、制御部10のCPUの演算負荷に応じてディスプレイに表示される画像の切り替えを適切に行うことができ、操作に対するナビゲーション装置の反応がわかりやすくなる。
(もっと読む)
車載用ナビゲーション装置およびマップマッチング動作制御方法
【課題】 幅広の主道路に側道が併走していて、これらの間を接続する分岐路が存在し、かつ、主道路のうち分岐路の近傍において車線変更せざるを得ないケースであっても、自車位置のミスマッチを未然に回避できる「車載用ナビゲーション装置およびマップマッチング動作制御方法」を提供する。
【解決手段】 自車両が現に走行している現走道路の進行方向前方に車線変更を要する道路特定部が存在し、かつ、この道路特定部の内方又は近傍に現走道路から分岐する分岐路CR1が存在する場合であって、現走道路のうち道路特定部を含む所定距離のマップマッチング規制区間RIを自車両が走行中の場合、マップマッチング動作を中止させることにより、分岐路CR1の近傍を走行中に行った車線変更を、隣接する道路間の車両移動と混同することがないようにする。
(もっと読む)
高速道路用車速監視カメラ警告装置
【課題】高速道路用か一般道路用かの情報が存在しないKML型式等の車速監視カメラのデータを用いるとき、走行を重ねるにつれて高速道路用か一般道路用かのデータを収集し、次第に誤った警告を出力しない「高速道路用車速監視カメラ警告装置」とする。
【解決手段】位置データと車速制限データとを備えるものの、一般道路用であるか高速道路用であるかのデータを備えていない、KML型式等の車速監視カメラのデータを外部から取り込んで、インターネットで取り込んだ地図上にPOI表示を行う。高速道路を走行するとき、高速道路から3m等の所定距離以内の車速監視カメラを抽出し、これに所定距離以内に近付いたとき、警告出力を行う。その時当該車速監視カメラは高速道路用であったか否かを利用者が確認して入力する。それにより、以降は当該一般道路用の車速監視カメラに対しては警告出力を行わないようになる。
(もっと読む)
地図表示装置
【課題】アイコンの表示数を変更して視認性を残しつつ利便性の良好な地図表示装置を得る。
【解決手段】自車の現在位置を求める自車位置特定手段2と、地図情報を記録した地図DB7と、地図データフィルタリング手段5と、地図表示手段4とを備える。地図データフィルタリング手段5は、現在位置と地図情報とを基に、走行中又は走行予定となる特定の道路と施設との距離を計算し、計算の結果が所定値以下となる施設を選択するフィルタリングモードを有する。地図表示手段4は、地図データフィルタリング手段5で選択された施設のアイコンを地図上に表示する。
(もっと読む)
車両乗降履歴関連付け装置および車両乗降履歴関連付け装置用のプログラム
【課題】車両の過去の履歴データを用いる技術において、降車と乗車の因果関係を特定して利用できるようにする。
【解決手段】乗車時刻および乗車場所のデータを含む乗車レコードと、降車時刻および降車場所のデータを含む降車レコードとの組を有する乗降レコードを、車両の走行の順に、走行履歴データに逐次記録し、同じ場所で同じ時間帯に乗車行動(または降車行動)があったレコードをグループ化して細分化乗車グループまたは細分化降車グループを作成し(ステップ100、200)、強い乗降の因果関係にある細分化乗車グループと細分化降車グループとを関連付けて乗降関連付けデータに記録する(ステップ300)。
(もっと読む)
位置推定装置及び位置推定システム
【課題】GPS位置情報の誤差を低減して自車両の絶対位置を高精度に推定する。
【解決手段】位置推定装置は、路側通信装置200から送信された絶対位置情報を受信する通信部51と、自車両のGPS位置情報を検出するGPSセンサ53と、車速を計測する車速計測部52と、車速計測部52により計測された車速を用いて、GPSセンサ53により検出されたGPS位置情報を、通信部51により絶対位置情報が受信された時点の自車両の絶対位置に補正すると共に、通信部51により受信された絶対位置情報と、補正されたGPS位置情報と、を平均化することにより、自車両の絶対位置を推定する車両位置推定部54と、を備えている。
(もっと読む)
位置情報送信機設定システム、位置情報送信機及び位置情報送信機の設定方法、
【課題】位置情報送信機の位置データ又はPRN番号の設定作業の作業性を向上する。
【解決手段】設定用端末から複数の位置情報送信機に対して、応答を求める第1の信号を無線通信により送信し、第1の信号を受信した複数の位置情報送信機から設定用端末に対して、第1の信号に応答する第2の信号を無線通信により送信し、第2の信号を受信した設定用端末から、第2の信号を送信した複数の位置情報送信機のうち特定の位置情報送信機との通信を確立するための第3の信号を、特定の位置情報送信機に対して、無線通信により送信し、特定の位置情報送信機との通信確立後に、設定用端末から特定の位置情報送信機に対して、特定の位置情報送信機の位置データを設定するための第4の信号を無線通信により送信することにより、位置データを設定する。
(もっと読む)
ナビゲーション装置
【課題】ベクトルデータを有していない地図であっても道路上に現在位置が表示されるように地図に現在位置をマッチングさせる。
【解決手段】まず、現在位置を移動量だけ移動した場合の位置に該当する色データ(パレット情報)を取得し(S202)、この色データ(パレット情報)と、道路領域を表す基準値(パレット情報)とを比較する(S203)。両方のパレット情報が一致すれば(S204:YES)、移動先が道路上にあると判断された場合の処理として現在位置を移動先に更新して(S205)、この処理を終了する。一方、移動先が道路上にあると判断されなかった場合、現在位置が道路上に表示されるように現在位置を補正する(S206)。
(もっと読む)
測位支援装置
【課題】本発明は、衛星航法に基づく測位系において、航行衛星から通知され、その航行衛星に搭載された時計が示す時刻の有効期間を延長する測位支援装置に関し、精度よく安定に航行衛星から正常に受信された衛星時刻の有効期間を大幅に延長することができることを目的とする。
【解決手段】時系列iの順に、航行衛星によって航法データが送信された時刻ti以降における前記航行衛星上の時刻Tiを個別に与え、かつ前記航法データで与えられる予測関数Fpiを蓄積するログ手段と、前記時系列iにおける値が前記時刻Tiの近似値もしくは前記時刻Tiであり、かつ前記時系列iの逆順に先行する所定の数Nの時点において、前記予測関数Fpiに対する偏差が既定の範囲に抑えられ、あるいは最小である予測関数Fpi′で前記予測関数Fpiを補完する補完手段とを備える。
(もっと読む)
測位支援装置
【課題】本発明は、衛星航法に基づく測位系において、航行衛星の位置、速度、加速度の何れかに生じる欠落を補完する測位支援装置に関し、地形や地物の分布に柔軟に適応し、かつ精度よく安定にリアルタイムによる測位を可能とすることを目的とする。
【解決手段】軌道データで時系列tの順に定まる航行衛星の速度Vt を蓄積するログ手段と、前記航行衛星の速度vt0と、前記速度vt0に対する誤差が所定の範囲内にある速度vt1〜vtnとを得る候補取得手段と、前記速度vt0、vt1〜vtnの内、前記時系列tの順に前記航行衛星に作用する外力Ftと前記航行衛星の質量mとの比の前記時系列tの逆順における積分の結果との和の前記ログ手段に先行して蓄積された所定の数Nの速度Vtに対する偏差が規定の範囲内にあり、あるいは最小である特定の速度で前記航行衛星の速度を補完する補完手段とを備える。
(もっと読む)
ナビゲーション装置
【課題】車両の現在位置周辺にある所望の目的地を目的地履歴から選択することが容易になナビゲーション装置を提案する。
【解決手段】制御部10は、過去に設定した目的地を目的地履歴として記憶部11に記憶する。そして、制御部10は、GPS受信部14が受信したGPS信号やジャイロセンサ15の出力に基づいて取得した車両の現在位置と、各目的地履歴の位置情報が表す位置との間の距離をそれぞれ算出し、算出された距離に基づいた順番に目的地履歴を並び換えて一覧表示する。
(もっと読む)
軌跡情報生成装置、方法およびプログラム
【課題】自立航法軌跡の精度を向上する技術の提供。
【解決手段】時系列の自立航法情報が示す車両の軌跡である自立航法軌跡を取得し、時系列のGPS情報が示す前記車両の軌跡であるGPS軌跡を取得し、前記自立航法軌跡と前記GPS軌跡とを比較して前記自立航法軌跡と前記GPS軌跡との一致度を最も高くするための前記自立航法情報の第1補正量を取得し、当該第1補正量より小さい第2補正量によって前記自立航法情報を補正する。
(もっと読む)
情報処理装置、情報処理システム、情報処理方法およびプログラム
【課題】処理負荷を増大させることなく、無線通信状態が悪い状態においても、ユーザが所望する情報を提供することができる情報処理装置を提供する。
【解決手段】情報処理装置としての移動端末200は、自身の位置を示す緯度経度の測位情報を取得して、取得された測位情報を含む時系列ログをサーバ300に送信する測位部202と、サーバ300による時系列ログに基づく学習処理により得られた、ユーザの活動状態を表す活動モデルを受信する行動認識部204および行動予測部206とを備え、行動認識部204は、測位部202により取得された測位情報と、受信した活動モデルとを用いて、ユーザの現在の活動状態を認識し、行動予測部206は、行動認識部204により認識されたユーザの現在の活動状態から、ユーザの行動を予測する。
(もっと読む)
軌跡情報生成装置、方法およびプログラム
【課題】自立航法軌跡の精度を向上する技術の提供。
【解決手段】時系列の自立航法情報が示す車両の軌跡である自立航法軌跡を取得し、前記自立航法軌跡と地図情報が示す道路の形状とが最も一致する道路を前記車両が走行している道路とみなすマップマッチング処理によって特定される時系列の前記車両の軌跡であるマッチング軌跡を当該マッチング軌跡の信頼度とともに取得し、時系列のGPS情報が示す前記車両の軌跡であるGPS軌跡を取得し、前記自立航法軌跡と前記GPS軌跡とを比較して前記GPS軌跡の信頼度を取得し、前記GPS軌跡と前記マッチング軌跡のうち、より高い信頼度の軌跡を補正目標軌跡とし、前記自立航法軌跡と前記補正目標軌跡との相違が減少するように前記自立航法情報を補正する。
(もっと読む)
軌跡情報生成装置、方法およびプログラム
【課題】自立航法軌跡の精度を向上する技術の提供。
【解決手段】時系列の自立航法情報が示す車両の軌跡である自立航法軌跡を取得し、時系列のGPS情報が示す前記車両の軌跡であるGPS軌跡を取得し、前記自立航法軌跡と前記GPS軌跡とを比較して、前記自立航法軌跡と前記GPS軌跡との相違が減少するように前記自立航法情報を補正する。
(もっと読む)
現在位置把握方法、現在位置把握システム、現在位置把握プログラム
【課題】計測エリア内において携帯無線端末を持つユーザの現在位置を正確に把握する。
【解決手段】位置把握装置20は、事前に作成した電波強度一覧表のデータに基づき定点観測位置のアクセスポイント101〜118までの推定距離を算出する。この推定距離を事前に作成した正解データ一覧表に基づき検算し、誤差が閾値以下3つのアクセスポイントの組合せを事前に定める。携帯無線端末30は、受信可能なアクセスポイントの電波強度と電波強度一覧表のデータとの誤差が閾値以下でなければ、前記組合せに応じて受信可能な複数のアクセスポイントの組合せを選定し、選定された各アクセスポイントからの距離を電波強度から推定して現在位置を求める。
(もっと読む)
361 - 380 / 2,582
[ Back to top ]