
Fターム[2F129BB33]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正対象 (3,438) | 位置 (2,582)
Fターム[2F129BB33]に分類される特許
321 - 340 / 2,582
測位装置、測位方法およびプログラム
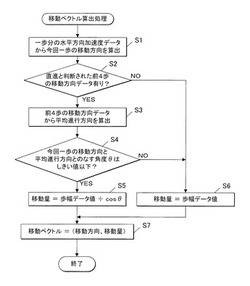
【課題】 歩行体の移動に対する追従性が良好で、且つ、高精度な測位を行うことのできる測位装置、測位方法およびプログラムを提供する。
【解決手段】 歩行体に保持されて歩行運動と方位に関する検出を行う自律航法用センサと、自律航法用センサの出力と歩幅データとに基づいて歩行体の移動量を算出する移動量算出手段と、前記自律航法用センサの出力に基づいて一歩ごとの移動方向を算出する移動方向算出手段(ステップS1)とを備え、移動量算出手段は、自律航法用センサの出力に基づき左右の足の踏込み方向の違いに起因する移動方向の一歩毎のブレ角度(θ)を算出するブレ角度算出手段(S2〜S4)を有し、歩幅データの値をブレ角度(θ)が大きくなるに従って歩幅が大きくなるように補正して一歩ごとの移動量として算出するようにした(S5)。
(もっと読む)
ナビゲーション装置および行程ガイド表示制御方法

【課題】面倒な操作を行うことなく、現在地から高速道路を降りるまでに存在する道路区間の渋滞状況の全容を把握することが可能な「ナビゲーション装置および行程ガイド表示制御方法」を提供する。
【解決手段】誘導経路に沿って高速道路を走行中のとき、渋滞情報に基づいて、高速道路上のインターチェンジ、ジャンクション、サービスエリアおよびパーキングエリアに対応する地点間の道路区間のうち、渋滞中の道路区間を渋滞道路区間として特定する。そして、特定した渋滞道路区間が全て含まれるように行程ガイド画像を生成して表示することにより、従来の行程ガイド画像において画面枠外に存在していた渋滞道路区間も一画面内に表示されるようにし、ユーザがスクロール操作等の面倒な操作を行わなくても、現在地から高速道路を降りるまでに存在する道路区間の渋滞状況の全容を把握することができるようにする。
(もっと読む)
情報処理装置及び方法、並びにプログラム
【課題】ユーザの移動状態に応じて、適切な表示形態で地図を表示させる。
【解決手段】デジタルカメラは、3軸加速度センサ20Bから出力される3軸加速度データに基づいて振動周期を求め、特にX成分に基づいて垂直方向の振動周期を求め、振動周期に基づいてユーザの移動状態を検出する。デジタルカメラは、検出された種類のユーザの移動状態に基づいて、表示部16に表示させる地図の表示形態を設定する。デジタルカメラは、設定された表示形態で地図を表示部16に表示させる制御を実行する。
(もっと読む)
地図表示装置が地図データを処理するためのコンピュータプログラム、地図表示装置及び方法
【課題】ジャイロスコープを搭載した可搬型情報処理装置を用いて、表示精度の高い地図表示装置を実現するための技術を提供する。
【解決手段】地図データに基づく地図画像を表示するディスプレイ5と、移動体の向きの変位角を検出するジャイロスコープ7と、複数の異なる時刻における移動体の位置を示す移動体位置情報を記憶する車両データ記憶部12と、移動体位置情報に基づいて、移動体が進行している進行方位を検出する演算処理部11と、出発地と目的地の指定を受け付けて、前記出発地から前記目的地までのルートを設定するルート検索部16と、ルート検索部16が設定したルートに従うナビゲーションの開始時に演算処理部11が検出した進行方位を基準進行方位とし、基準進行方位及びジャイロスコープ7が検出した変位角に応じて、ディスプレイ5に地図画像を表示させる表示制御部13と、を備える。
(もっと読む)
車両駆動制御装置
【課題】目的地に至る経路を特定するための操作を必要とすることなく、エネルギー消費量の低減を図る。
【解決手段】制御指標のスケジュールを規定するための走行条件を区間毎に収集して耐久記憶媒体23に蓄積記憶させる。バッテリ残量が下限規格値または上限規格値となった場合、このバッテリ残量が下限規格値または上限規格値となった地点を含む前後の一定区間を計画制御対象候補区間とし、この区間について耐久記憶媒体23に蓄積記憶された走行条件を用いてバッテリ残量が規格範囲内となるように制御指標のスケジュールを計画する。車両が計画制御対象候補区間に進入した場合、この区間の制御指標のスケジュールに従って動力源の駆動制御を行う。
(もっと読む)
地図表示装置が地図データを処理するためのコンピュータプログラム、地図表示装置及び方法
【課題】GPS機能及びジャイロスコープを搭載した可搬型情報処理装置を用いた地図表示装置において、GPSの測位誤差による誤表示を防止する。
【解決手段】移動体位置を道路リンクに対応付けるリンクマッチングを行う(S300)。第1の時刻の移動体位置と対応付けられた第1の道路リンクと、第1の時刻以前の第2の時刻の移動体位置と対応付けられた第2の道路リンクとが、直進性を有しない不連続な位置関係にあるとき、第1の時刻と第2の時刻との間にジャイロスコープが出力した変位角に基づいて、第1の道路リンクへのリンクマッチングが適当であるか否かを判定する(S304)。
(もっと読む)
車両用表示装置および車両用映像表示制御方法
【課題】狭路や狭い屈曲路を走行中に最も接触の危険性が高い車体部分を含んだ範囲の映像に自動的に切り替えて表示する車両用表示装置を提供する。
【解決手段】表示コントローラ11は、ナビゲーション装置13により取得した車両の現在位置周辺の道路地図情報、車両周囲センサ14により測定された車両周辺の障害物までの距離を用いて、狭路または屈曲路へ接近または進入したことを判別し、さらに、車両情報収集手段12により収集された車両情報を用いて、判別された狭路またはクランクにおける走行状況を識別し、車載カメラ15で撮影した車両周辺の映像の表示内容を指示する表示制御指令を出力することにより、カメラ映像切替装置16は、該表示制御指令の表示内容が指示する通り、仮想カメラの視点位置と視点方向と表示範囲とを変更した映像に切り替えて表示装置17へ表示する。
(もっと読む)
車両用ナビゲーション装置
【課題】離脱領域を確実に判定してマップマッチング動作による不具合を防止する車両用ナビゲーション装置を提供する。
【解決手段】カーナビは、マップマッチング動作により道路を走行している場合に使用者が方向指示器を操作して分岐したときは(S1:YES)、その分岐点の情報を一時的に記憶し(S2)、その後に路側近接通信機から取得した道路情報が新規道路であることを示していた場合は(S10:YES)、マップマッチング動作を停止してGPSによるフリー軌跡モードに移行し(S11)、解除条件が成立した場合は(S13:YES)、マップマッチング動作に復帰し(S14)、分岐点から解除点までを解除領域として地図データとして登録し(S16)、次の走行時に離脱領域を走行する場合は、マップマッチング動作を停止する。
(もっと読む)
電子機器及びプログラム
【課題】位置情報や移動速度を取得できない状況であっても、低コストかつ的確に目的物の設置位置に関する情報の報知を行なう。
【解決手段】データベースにはトンネル内速度測定装置eと装置eの位置へ至るトンネル内の道路上位置に設けた誘導点b,c,dの位置情報を記憶している。誘導点bはトンネル進入前のGPS受信器によって測位可能な位置から1km以内の位置に設定し、各誘導点間の距離も1km以内に設定している。トンネル進入点aで測位不能になる直前の現在位置から誘導点bに向けて測位不能になる直前の速度で進行しているものとして現在位置を更新していき、各誘導点位置に到達したら次の誘導点に向けて同様に現在位置を更新する。次の誘導点がない場合にはトンネル内速度測定装置へ向けて同様に現在位置を更新する。トンネル内速度測定装置eとの現在位置の関係が2km、1km、500mになった際にそれぞれ接近警報を発する。
(もっと読む)
ナビゲーション信号送信装置および位置情報提供装置
【課題】屋内測位送信機からの測位信号による測位時間の短縮を実現することが可能なナビゲーション信号送信装置および位置情報提供装置を提供する。
【解決手段】情報提供サーバ1230は、携帯電話機1200から送られてくる送信機1210の送信機IDを認識すると、送信機IDに関連付けられているデータベースを参照して、そのIDに関連するSVG地図情報(地図を表示する情報と送信機IDと送信機の当該地図上の位置との対応関係の情報とを含む)を読み出す。情報提供サーバ1230が、SVG地図情報のデータを基地局1240に対して送信すると、基地局1240は、そのSVG地図情報のデータを無線発信する。携帯電話1200は、そのデータの着信を検知すると、携帯電話1200の使用者による閲覧操作に従って、そのデータから、送信機1210の位置を取得することができる。
(もっと読む)
車両用軌跡推定装置
【課題】GPS受信装置がGPS衛星からの信号に基づいて算出する情報をカルマンフィルタの観測量に用いることで、自立センサの誤差を推定し、推定したセンサ誤差を補正する技術において、カルマンフィルタで用いるGPS測位結果の精度の劣化を全体として抑える。
【解決手段】カルマンフィルタは、観測量として、使用対象の複数のGPS衛星毎に、当該GPS衛星の擬似距離およびドップラー周波数について、その量をGPS衛星からの信号に基づいて算出した値とその量を推測航法で算出した値との乖離量を採用するタイトカップリング型である。当該車両用軌跡推定装置は、当該カルマンフィルタにおける上記乖離量についてのカイ自乗値と所定の閾値とを比較し(S451)、当該カイ自乗値が当該所定の閾値以上である場合、使用対象の複数のGPS衛星毎うち精度の低い一部を選び、選んだ当該一部を使用対象から除外する(S452)。
(もっと読む)
地図表示装置及び地図表示プログラム
【課題】隣接して表示される2つの地図上の道路が1本の連続した道路と誤認されるのを防止する。
【解決手段】隣接する2つの地図上にそれぞれ表示される2つの軌道が該2つの地図の境界を越えて連続する1つの軌道と誤認される可能性の有無を判定する誤認判定部と、誤認判定部が誤認の可能性があると判定したときに誤認の可能性が無い地図表示に修正する地図表示修正手段とを備えた地図表示装置が提供される。
(もっと読む)
ナビゲーション装置
【課題】 ユーザが現在位置を、マッチング処理されたマッチング位置と誤解することなく容易に把握することを可能にするナビゲーション装置を提供する。
【解決手段】 表示制御手段は、ナビゲーション装置が車両内に載置して使用されている場合は、マッチング制御手段においてマッチング処理されたマッチング位置を地図データまたは経路に合成した表示データを作成し、ナビゲーション装置が車両内に載置して使用されていない場合は、マッチング制御手段においてマッチング処理されたマッチング位置、及び現在位置検出手段によって特定された現在位置を画面分割によって別々に表示された別々の地図上に表示する表示データを作成する。
(もっと読む)
ナビゲーション装置、駆動切替方法、および、プログラム
【課題】ハイブリッド車内で音声の入出力を行う場合に、エンジン音による機能品質の低下を防ぐ技術を提供する。
【解決手段】エンジン駆動によって車両を駆動する第1の駆動装置211と、電気駆動によって車両を駆動する第2の駆動装置212と、を備える車両に設置されるナビゲーション装置100であって、車両内で音声の入出力を行うための所定条件を満たしているか否か判定する条件判定部と、条件判定部による判定結果に応じて、第1の駆動装置211と第2の駆動装置212を制御する駆動管理部と、を備え、駆動管理部は、条件判定部によって上記の所定条件が満たされていると判定された場合には、第1の駆動装置211によるエンジン駆動を停止する。
(もっと読む)
車両用現在位置検出装置
【課題】角速度センサの出力値を車両の回転角速度に換算する比率を示す換算ゲインを精度良く補正する。
【解決手段】ナビゲーション装置10において、演算部22は、換算ゲインを用いジャイロ12の出力値に基づいて車両の方位変化量を算出する。演算部21は、車速センサ11の出力値に基づいて車両の移動距離を算出する。現在位置検出部14は、算出される方位変化量および移動距離に基づいて車両の現在位置や進行方向を算出する。誤差推定部25は、GPS受信機13からの出力値と現在位置検出部14での算出値との差を観測値として算出し、その観測値に基づいて換算ゲインの誤差を状態量として推定する。補正部26は、推定される状態量に基づいて換算ゲインを補正する。換算ゲインの誤差共分散値が所定値よりも大きい場合には、当該換算ゲインの誤差共分散値を所定値に置き換える。
(もっと読む)
ナビゲーション装置
【課題】地図の視認性を確保するためのPOIアイコンの限定表示を、煩雑な操作を要することなく、ユーザの生活圏の内外に応じたユーザのニーズを適切に反映した状態で効率的に行うことができるナビゲーション装置を提供する。
【解決手段】ユーザが使用したPOIを使用頻度とともに示すPOI使用履歴を、ユーザの生活圏内および生活圏外の各領域ごとに分類した状態で記録するPOI使用履歴記録手段を備え、アイコン表示手段は、POI使用履歴記録手段によって記録された各領域ごとのPOI使用履歴のうち、自車位置が属する領域に対応するPOI使用履歴に基づいて、使用頻度が相対的に高い所定数以内の種類のPOIを示すアイコンを表示する。
(もっと読む)
脇見判定装置
【課題】運転者の脇見を適切に判定する。
【解決手段】脇見判定装置10のカーブ検出部26は、自車両から所定距離以内の前方におけるカーブの存在有無および当該カーブのカーブ方向を検出する。判定範囲変更部28は、カーブの存在が検出された場合に、車両状態取得部25により取得された自車両の旋回方向がカーブ方向に変化する以前に非脇見判定範囲をカーブ方向に所定角度θだけ変位させるようにして変更する。脇見判定部27は、視線方向検知部24により検知された運転者の視線方向と判定範囲変更部28により変更された非脇見判定範囲とに基づいて運転者が脇見状態であるか否かを判定する。
(もっと読む)
測位装置、測位方法、プログラム及び撮像装置
【課題】測位手段による測位の不安定な状態における位置情報の精度の向上を図る。
【解決手段】CPU10は、撮影位置において自律航法測位による継続的計測及びGPS測位による所定タイミング毎の測定を開始する。そして、CPU10は、GPS測位によって得られた少なくとも2以上の位置データに基づいて算出される移動ベクトルと、自律航法測位によりGPS測位によって得られた位置データとそれぞれ同時期に得られた2以上の地点における移動ベクトルとの差が所定範囲以内である場合に、少なくとも2以上の位置データのうちの何れかに基づいて位置情報取得地点を定める。そして、CPU10は、位置情報取得地点における位置データと自律航法測位により継続的に計測されてきた位置データとに基づいて撮影位置の位置データを求める。
(もっと読む)
位置推定装置、位置推定方法およびプログラム
【課題】位置推定装置、位置推定方法およびプログラムを提供する。
【解決手段】基地局の位置情報を記憶している基地局情報記憶部と、前記基地局情報記憶部に記憶されている位置情報が制限範囲内である基地局の位置情報、および当該基地局から送信された無線信号の信号強度の測定情報に基づき、前記無線信号の測定位置を推定する位置推定部と、を備える位置推定装置。
(もっと読む)
ナビゲーション装置
【課題】ナビゲーションシステムに表示されたWeb情報を記録することができるナビゲーション装置を提供する。
【解決手段】通信可能にネットワークに接続されたサーバーから必要なWeb情報の要求を送信する送信手段10と、該送信手段10からの要求に基づき、該サーバーからされたWeb情報を受信する受信手段20と、記録媒体に格納された情報または受信手段20から受信されたWeb情報を入力する入力手段と、該入力手段で入力された情報を記憶する記憶手段40と、該入力手段で入力された情報を表示する表示手段と、表示された情報を出力する出力手段60と、送信手段10、受信手段20、入力手段、記録手段40、表示手段とを制御する制御手段とにより構成し、出力手段60を、表示手段に表示された入力手段で入力された情報を印刷する印刷装置61で、Web情報をデータとして出力する。
(もっと読む)
321 - 340 / 2,582
[ Back to top ]