
Fターム[2F129BB33]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正対象 (3,438) | 位置 (2,582)
Fターム[2F129BB33]に分類される特許
261 - 280 / 2,582
航空機をタキシングするための操舵方法
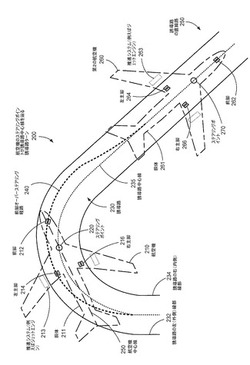
【課題】航空機タキシングのための方法、非一時的なコンピュータ可読媒体、および航空機を提供すること。
【解決手段】特定の一方法は、曲線区間を有する誘導路に対して相対的な航空機の場所を決定する。方法は、曲線区間の少なくとも第1の部分を通って航空機を操舵するための第1の前脚ステアリング角度を決定する。第1の前脚ステアリング角度は、航空機の前脚を誘導路中心線から逸れさせるように選択される。第1の前脚ステアリング角度は、曲線区間の少なくとも第1の部分を航空機が横断する際に航空機のステアリングポイントをほぼ誘導路中心線の上に保持するように選択される。ステアリングポイントは、航空機の前脚と主脚との間に位置する。
(もっと読む)
測位装置、及び測位方法

【課題】様々な場所でできるだけ正確な位置を測位できるようにする。
【解決手段】
航法衛星システムの複数の衛星から送信された衛星信号を受信して現在位置を示す位置情報を演算するものであって、高感度と低感度の衛星信号受信機能を有し、高感度の衛星信号受信機能を使って演算された高感度での位置情報と、低感度の衛星信号受信機能を使って演算された低感度での位置情報とを、選択的に又は並行的に出力する航法衛星センサと、航法衛星センサから前記高感度での位置情報と低感度での位置情報とを選択的に又は並行的に取得して、高感度での位置情報と低感度での位置情報のいずれか一方を、移動体の現在位置を示す現在位置情報として選択する測位制御装置と、を備える測位装置。
(もっと読む)
移動体位置測定装置
【課題】車載カメラを利用した実時間測位の技術に係わり、安価かつ高精度な測位を実現できる技術を提供する。
【解決手段】本自動車及び車載情報システム100の実時間測位部1は、車載のカメラ4から参照地点付近で撮影された複数の実画像を入力し、その中から特徴部を抽出して第1の特徴情報(c1)とする第1の特徴抽出部11と、地図DB5から対応する第2の特徴情報(c2)を読み出して取得する第2の特徴抽出部12と、第1、第2の特徴情報を入力して特徴部を比較してマッチングすることにより、各特徴部の位置を推定し、当該位置をもとに、SFM手法を用いて、移動に伴う各時点の自車の位置と上記各特徴部の位置との相対的な位置関係を演算することにより、自車現在位置を推定して第2の位置情報(L2)として出力する特徴マッチング部13と、を有する。
(もっと読む)
自車位置認識システム、自車位置認識プログラム、及び自車位置認識方法
【課題】車両の進行方位が道路の延在方位と異なる場合であっても推定自車位置を適切に補正することが可能な自車位置認識システム及び自車位置認識プログラムを実現する。
【解決手段】道路の延在方位EDに平行な方位を基準方位SDとして設けられた路面上の地物を対象地物Mとして、撮影画像に含まれる対象地物Mの画像認識処理を行う画像認識部と、画像認識部により認識された対象地物Mと自車両100との相対方位RDと、自車両100の進行方位MDとに基づき、対象地物Mの基準方位SDを特定する基準方位特定部と、推定自車位置EPの周辺の道路情報に基づき、基準方位特定部により特定された基準方位SDと延在方位EDが一致する道路上の位置である地物方位一致位置P0を検出し、当該地物方位一致位置P0に基づき推定自車位置EPを補正する地物利用自車位置補正部と、を備える。
(もっと読む)
多言語選択装置
【課題】言語を手動で選択する際の操作を簡略化して操作性を向上させることができる多言語選択装置を提供すること。
【解決手段】ナビゲーションコントローラ1は、複数の言語が含まれる複数ページにわたる言語選択画面を作成する選択画面作成部30と、言語選択画面をページ毎に表示する処理を行う選択画面描画部34と、操作部5を用いた利用者の指示に応じて、選択画面描画部34によって描画して表示する言語選択画面の各ページを所定の表示順番で切り替える選択画面切替部32と、操作部5を用いた利用者の指示に応じて、表示された言語選択画面に含まれる一の使用言語を選択する言語選択部36と、言語選択部36による使用言語毎の選択頻度を集計する選択頻度集計部38とを備える。選択画面作成部30は、使用頻度が高い使用言語が表示順番の早い言語選択画面に含まれるように言語選択画面を作成する。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 絶対位置データが得られないまま自律航法の測位が行われ、その後に、絶対位置データが取得された場合でも、始端からの一連の位置データを正確に求められる測位装置、測位方法およびプログラムを提供する。
【解決手段】 絶対位置が不明な状態で自律航法の測位手段により一連の相対変位データ(La0)が取得され、この取得後に測位衛星により複数地点の絶対位置データ(B1,C2)が取得された場合に、一連の相対変位データ(La0)を、その後に取得された絶対位置データ(B1)に基づき、絶対位置にそれぞれ対応づけて一連の位置データ(La1)に変換するとともに、絶対位置データ(B1,C2)が取得された複数地点間の一連の位置データ(Lb1)に対して行った補正と同一のパラメータを用いて、絶対位置が不明な状態で取得された一連の位置データ(La1)を補正する。
(もっと読む)
位置推定方法、端末装置及びプログラム
【課題】位置推定方法、端末装置及びプログラムに関し、位置推定精度を低下させることなく端末装置の消費電力を低減することを目的とする。
【解決手段】端末装置の移動距離を算出し、移動方向の変化が検出されてから所定時間後に絶対位置を取得する処理を繰り返し、1回目の処理で取得した第1の絶対位置と2回目の処理で取得した第2の絶対位置を通る移動距離の長さを有する第1のリンクを算出し、第1及び第2の絶対位置と3回目の処理で取得した第3の絶対位置に最も近く第1の絶対位置を通らない移動距離の長さを有する第2のリンクを算出する。第1及び第2のリンクの第1の絶対位置に対する方位を示す角度の差が所定値以内であれば第2のリンクの角度を第1の絶対位置の直前のリンクと直後の第1のリンクとがなす角度とみなし、第1の絶対位置の直前のリンクと直後の第1のリンクを接続したリンク形状に基づいて端末装置の現在位置を推定するように構成する。
(もっと読む)
周遊ルート生成装置、周遊ルート生成方法、及びプログラム
【課題】ユーザによる目的地の指定を必要とせず、出発地点からの周遊ルートを生成することのできる周遊ルート生成装置、周遊ルート生成方法、及びプログラムを提供する。
【解決手段】周遊ルート生成装置は、生成する周遊ルートの目標ルート距離を取得する距離取得部と、上記周遊ルートの出発地点とする基準点を取得する基準点取得部と、上記周遊ルートの経由地点を決定する経由地点決定部と、上記基準点から上記経由地点を経由し、再び上記基準点に戻るまでのルート距離が、上記目標ルート距離となる周遊ルートを生成する周遊ルート生成部と、を有する。
(もっと読む)
位置情報測定装置、方法及びプログラム
【課題】位置測定の要否をより的確に判定できるようにして省電力効果をさらに高める。
【解決手段】屋内外切り替わり判定ユニット2を設け、この屋内外切り替わり判定ユニット2により、先ず周囲の気温を周期的に測定してその温度情報に対しcosine similarityを適用することにより温度変化量を算出し、この算出された温度変化量を加重平均することにより切り替わり確度を算出している。続いて、この算出された切り替わり確度が閾値以上であるか否かを判定し、閾値以上と判定された場合に位置測定ユニット1に対し測定状況送信要求を送信して測定状況情報を取得する。そして、この取得された測定状況情報をもとに位置情報測定部14が非測定状態にあるか否かを判定し、非測定状態と判定された場合に測定開始トリガを生成して、この測定開始トリガを位置測定ユニット1へ送信して位置情報測定部14による位置情報測定動作を再開させるようにしたものである。
(もっと読む)
移動端末、システム及び方法
【課題】自律航法機能を有する移動端末における進行方向の推定誤差の蓄積を解消するため、地図情報を利用することにより進行方向を補正する。
【解決手段】目的地までのルート上に移動端末の現在位置をマップマッチングする地図アプリケーション部と、当該移動端末の動きを検知し、歩数及び進行方向を示すセンサ情報の測定部と、当該移動端末の現在位置を決定する位置算出部と、ユーザの進行方向の変化量が所定の期間に所定の範囲内にあるか判断することによって直進歩行状態にあると推定した場合、前記ルート上の前記直進歩行状態にある直進部分の方位により前記ユーザの進行方向を補正する進行方向補正部と、前記補正された進行方向と、前記直進歩行状態の開始時点及び開始地点とに基づき、当該移動端末の現在位置を前記開始地点から再計算し、該再計算された現在位置により当該移動端末の現在位置を補正する現在位置補正部とを有する。
(もっと読む)
走行支援システム、走行支援プログラム、及び走行支援方法
【課題】それぞれの走行支援処理の目的に応じた認識精度を確保しつつ、簡易かつ迅速に走行支援処理を実行することができる走行支援システムを実現する。
【解決手段】車両の走行支援に関する複数の支援処理APを実行可能な走行支援システム1。画像データ中に含まれる認識対象物の画像認識処理を行う画像認識部36と、画像認識処理の結果に基づいて動作する支援処理APのそれぞれについて当該支援処理APの実行のための要求認識精度に応じた画像データ中の設定認識領域の情報を記憶した認識領域情報記憶部73と、実行候補支援処理を抽出する候補処理抽出部31と、抽出された実行候補支援処理について、画像認識処理により認識対象物が認識された画像データ中の位置が当該実行候補支援処理についての設定認識領域内に含まれていることを条件として当該実行候補支援処理の実行を許可する支援処理実行管理部37と、を備える。
(もっと読む)
移動端末、システム及び方法
【課題】自律航法機能を有する移動端末における測位誤差の蓄積を解消するため、ルート上の各地点で適宜位置補正する。
【解決手段】地図情報における移動端末のユーザの出発地から目的地までのルート上で前記ユーザが方位変更すると想定される方位変更地点を取得し、該取得した方位変更地点をアンカーポイントとして設定及び格納するアンカー管理部と、当該移動端末の動きを検知し、前記動きを示すセンサ情報を提供する測定部と、前記センサ情報に基づき、当該移動端末の現在位置を算出する位置算出部と、前記センサ情報に基づき、前記ユーザの回転動作を検出し、該検出した回転動作の回転地点を決定する回転検出部と、前記アンカー管理部により格納されているアンカーポイントから前記決定された回転地点に対応するアンカーポイントを決定し、該決定されたアンカーポイントの位置により当該移動端末の現在位置を補正する現在位置補正部とを有する。
(もっと読む)
道路ノード位置管理システム
【課題】道路情報から読み出される合流・退出ノードの位置と、実際に合流・退出走行が開始される地点とのずれを起因とする各種処理における不都合を低減する。
【解決手段】道路情報中における合流・退出ノードに対応する、合流・退出レーンと本線レーンとの接続区間での車両走行軌跡に基づいて、合流・退出レーンと本線レーンとの間の移行地点の位置を学習用合流・退出位置として取得するとともに、移行の際の合流・退出角度を学習用合流・退出角度として取得し、学習用合流・退出位置及び学習用合流・退出角度に基づいて、道路情報中の前記ノードである基本ノードとは別に学習用合流・退出位置の前記本線リンク上の位置である地点一致位置、及び交差角度が学習用合流・退出角度と一致する仮想合流・退出リンクと前記本線リンクとの交点の位置である角度一致位置、の少なくとも一方に補助ノードを設定する。
(もっと読む)
移動スキル情報提供装置
【課題】移動中のトラブル発生を低減しながら、他の車両の移動スキルに関する情報を得られるようにした移動スキル情報提供装置を提供する。
【解決手段】センタ装置20の制御装置21は、登録された車両S,A,B,Cのランク付けを行うことで、最上級ランクの車両S,上級ランクの車両A、中級ランクの車両B、初級ランクの車両Cであることをランク付けする。センタ装置20の制御装置21は、最上級ランクの車両Sの車載端末1Sから得られた移動スキルに関する情報を上級ランクの車両Aの車載端末1Aに提供する。車両Aの車載端末1A側で移動スキルが確立されると、制御装置21は、上級ランクの車両Aの車載端末1Aの移動スキルに関する情報を当該車載端末1Aから受信し、中級ランクの車両Bの車載端末1Bに提供する。
(もっと読む)
施設退出案内システム及び施設退出案内プログラム
【課題】施設内から出口を通じて施設外の道路へ退出しようとした際に、その出口手前で報知される退出後案内ができるだけ適切となるような技術の提供。
【解決手段】自車両が接近中の出口である接近対象出口から退出しようとしている退出前状態と推定された場合に、道路情報に基づく接近対象出口からの退出後の進行方向の案内である退出後案内情報を接近対象出口からの退出前に音声報知する音声報知部と、先の退出後案内情報の報知後に、再び前記退出前状態であることが推定された場合に、再度の退出後案内情報の報知又は非報知を判定する再報知判定部とが備えられている。再報知判定部は、再度の退出後案内情報の内容が先の退出後案内情報の内容と同じ場合であって予め定められた再報知禁止条件を満たす場合には非報知とし、先の退出後案内情報の報知後に行われた自車両の進路変更の方向が当該先の退出後案内情報により案内した進行方向と同じ方向であった場合には報知とする。
(もっと読む)
移動端末、システム及び方法
【課題】適切なリルートタイミングを検知する移動端末、システム及び方法を提供すること。
【解決手段】本発明の一態様は、自律航法機能を有する移動端末であって、地図情報における当該移動端末のユーザの出発地から目的地までのルート上に当該移動端末の現在位置をマップマッチングする地図アプリケーション部と、当該移動端末の動きを検知し、前記ユーザの動きを示すセンサ情報を提供する測定部と、前記センサ情報に基づき基準位置からの当該移動端末の移動量を算出し、該算出された移動量と前記基準位置とに基づき当該移動端末の現在位置を算出する位置算出部と、前記算出された当該移動端末の現在位置と前記基準位置との間の第1距離と、前記マップマッチングされた当該移動端末の現在位置と前記基準位置との間の第2距離とを比較し、前記第1距離が前記第2距離より十分大きいと判断した場合、前記地図アプリケーション部にルートの再検索を要求するリルート検知部とを有する移動端末に関する。
(もっと読む)
車載装置
【課題】 本発明の目的は、不正な充電の履歴を収集することができる車載装置の技術を提供することにある。
【解決手段】
本発明に係る車載装置は、搭載された車両が存在する位置である自車位置を取得する自車位置取得手段と、記憶手段と、車両の動力源への充電開始を検知する充電開始検知手段と、充電の開始を検知した時刻を充電開始時刻として特定する充電開始時刻特定手段と、車両の動力源への充電の終了を検知する充電終了検知手段と、充電の終了を検知した時刻を充電終了時刻として特定する充電終了時刻特定手段と、充電開始時刻から充電終了時刻までの間に動力源へ充電した充電量を特定する充電量特定手段と、充電開始時刻と、充電終了時刻と、充電開始時刻における自車位置と、充電量と、を含む充電情報を記憶手段に格納する充電情報記録手段と、を備えることを特徴とする。
(もっと読む)
移動端末、システム及び方法
【課題】自律航法機能を有する移動端末における測位誤差の蓄積を解消するための歩幅補正が可能な移動端末、システム及び方法を提供すること。
【解決手段】本発明の一態様は、自律航法機能を有する移動端末であって、地図情報における当該移動端末のユーザの出発地から目的地までのルート上で取得した当該移動端末の現在位置と基準地点との間の実距離を算出する地図アプリケーション部と、当該移動端末の動きを検知し、前記ユーザの歩数及び進行方向を示すセンサ情報を提供する測定部と、前記センサ情報の前記ユーザの歩数及び進行方向と現在設定されている前記ユーザの歩幅とに基づき当該移動端末の前記基準地点からの移動量を推定し、該推定された移動量に基づき当該移動端末の現在位置を推定する位置算出部と、前記算出された実距離と前記推定された移動量との誤差を算出し、該算出した誤差に基づき前記ユーザの歩幅を補正する歩幅推定部とを有する移動端末に関する。
(もっと読む)
道路ノード位置管理システム
【課題】道路情報から読み出される合流・退出ノードの位置と、実際に合流・退出走行が開始される地点とのずれを起因とする各種処理における不都合を低減する。
【解決手段】道路情報中における合流・退出リンクと本線リンクとの交点としての合流・退出ノードの通過後の所定区間内で実行される可能性がある運転制御処理の情報、当該合流・退出ノードにおける前記車両の走行履歴、当該合流・退出ノードの形状的特性、の少なくとも1つを含む車両運転条件を取得し、車両運転条件に基づいて車両の経路案内処理に適した位置に合流・退出ノードを補正する第1補正処理と、マップマッチング処理に適した位置に合流・退出ノードを補正する第2補正処理とのいずれかが選択される。
(もっと読む)
車載機器、車載機器の制御方法、及び、プログラム
【課題】所望の交差点を容易に特定できるようにした上で、特定した交差点の周辺に存在する施設を検索するようにする。
【解決手段】車載ナビゲーション装1は、第1道路を示す情報、この第1道路と交差する第2道路を示す情報、及び、施設種別が入力される入力部14と、入力された第1道路を示す情報、及び、第2道路を示す情報に基づいて、第1道路と第2道路とが交差する交差点を検索する交差点検索部20と、入力された施設種別を有する施設であって、交差点検索部20により検索された交差点の周辺に存在する施設を検索する施設検索部21と、を備える。
(もっと読む)
261 - 280 / 2,582
[ Back to top ]