
Fターム[2F129BB33]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正対象 (3,438) | 位置 (2,582)
Fターム[2F129BB33]に分類される特許
241 - 260 / 2,582
電離層遅延評価装置および航法装置
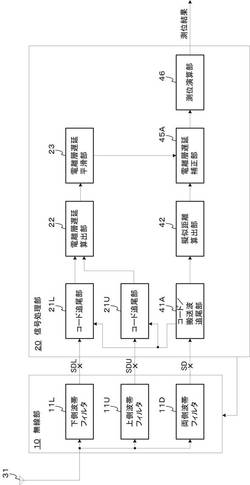
【課題】本発明は、衛星航法系において、誤差の要因となる電離層遅延を求める電離層遅延評価装置と、その電離層遅延評価装置またはこれに代わる装置との連係に必要なインタフェースの機能を有する航法装置とに関し、ハードウェアの規模が大幅に増加することなく、電離層遅延の補正を精度よく安定に実現できることを目的とする。
【解決手段】航行衛星から電離層を介して到来した受信波の占有帯域に含まれ、かつ帯域幅が異なる第一の帯域および第二の帯域における前記受信波の成分に基づいてそれぞれ求められた前記航行衛星の距離d1、d2の差Δdと、前記第一の帯域内の周波数f1および第二の帯域内の周波数f2とに基づいて、前記電離層の状態を推定する電離層状態推定手段と、前記航行衛星から前記受信波として到来し得る無線信号の周波数Fと前記電離層の状態とに基づいて、前記無線信号に前記電離層で生じた遅延を求める遅延算出手段とを備える。
(もっと読む)
走行道路推定装置、方法およびプログラム

【課題】走行道路の誤推定が発生し得る交差点に広く適用可能であるとともに、誤推定の発生を抑制することが可能な技術の提供。
【解決手段】車両の走行軌跡と地図情報が示す道路の形状との一致度に基づいて前記車両が走行する走行道路を推定する走行道路推定装置において、第1退出道路と第2退出道路とが接続された交差点であるとともに、前記地図情報が示す前記第1退出道路と前記第2退出道路との関係が所定の関係である対象交差点が、前記車両の前方の所定範囲内に存在すると判定された場合、前記地図情報が示す前記第1退出道路の形状よりも当該第1退出道路に前記車両が退出する場合の前記走行軌跡に近い形状の仮想道路を生成し、 前記仮想道路の形状および前記地図情報が示す前記第2退出道路の形状のそれぞれと、前記車両の走行軌跡との一致度に基づいて前記車両が走行する前記走行道路を推定する。
(もっと読む)
移動経路推定方法、端末装置、サーバ及びプログラム
【課題】移動経路推定方法、端末装置、サーバ及びプログラムにおいて、GPS機能を利用できない場合、或いは、GPS機能を利用しても正確な絶対位置が得られない場合でも自律測位を用いる携帯端末装置の位置推定精度を向上する。
【解決手段】端末装置の直線移動距離を組み合わせたリンクに関するリンク情報を取得し、リンク上の任意の位置で端末装置の絶対位置に依存するメタ情報を取得し、端末装置が位置するエリアに対応するトポロジーデータを取得し、メタ情報から推定した絶対位置から所定距離内の範囲のエリアに対応するトポロジーデータとリンク情報とを比較して類似度が閾値以上で最大のトポロジーリンクを取得して推定移動経路のデータとして出力するマッチング処理を行うように構成する。
(もっと読む)
ナビゲーション装置、ナビゲーション方法、およびプログラム
【課題】経路の案内が適切かどうかを判定可能なナビゲーション装置、ナビゲーション方法、およびプログラムを提供する。
【解決手段】経路を設定して走行している車両が経路を離脱した離脱地点に関する離脱地点情報を取得し(S101)、経路を設定している車両であって離脱地点にて経路を離脱した車両である離脱車両が離脱地点を離脱した後の走行履歴に関する離脱後走行履歴情報を取得する(S109)。離脱後走行履歴情報に基づき、離脱地点にて経路を離脱した後に設定されたリルート経路通りに走行したか否かを離脱車両毎に判定し(S110)、リルート経路通りに走行したと判定された離脱車両の割合が第1の所定値以上であると判断された場合(S111:YES)、離脱地点における経路の案内が適切でないと判定する(S112)。これにより、離脱地点における経路の案内が適切かどうかを適切に判定することができる。
(もっと読む)
地図情報処理装置
【課題】新旧バージョンの地図を跨って経路探索および経路案内を行うことができる地図情報処理装置を提供する。
【解決手段】階層構造を有し、地域毎にバージョンアップされる地図データであって、下層地図のバージョンアップに応じて該下層地図に対応する上層地図がバージョンアップされた地図データを記憶する地図データ記憶部102と、地図データ記憶部に記憶されている下層地図および上層地図の地図データを用いて経路探索を実行し、該経路探索によって得られた上層地図上の経路に対応する下層地図上の経路が存在する場合は該経路を表示して経路案内を行い、上層地図上の経路に対応する下層地図上の経路が存在しない場合は、目的地の方向を示した簡易案内を行う経路探索・案内部107を備えている。
(もっと読む)
状態推定装置、状態推定方法および状態推定プログラム
【課題】高速に状態ベクトルを収束させる。
【解決手段】状態推定装置は、非線形カルマンフィルタKF1〜KF10と、各フィルタの観測残差ekのノルムの最大値を検出する観測残差ピークモニタPM1〜PM10と、互いに異なる初期姿勢を示す初期値INI1〜INI10を生成する初期値生成部130Aを備える。初期値INI1〜INI10が与えられると、非線形カルマンフィルタKF1〜KF10は並列に動作する。そして、比較部110は、観測残差ekのノルムの最大値を比較し、最も小さいノルムの最大値に対応する非線形カルマンフィルタの出力を選択するように選択部120を制御する。
(もっと読む)
ナビゲーション装置
【課題】ナビゲーション用データを格納したストレージデバイスが故障した場合に経路案内ができなくなる事を回避するナビゲーション装置を提供する。
【解決手段】装置本体に設けられた2つのスロット19の両方に、ナビゲーション用データ21を格納したリムーバブルメディア20を装着しつつ、いずれかのリムーバブルメディア20からナビゲーション用データ21を読み込んで経路を案内することを特徴とする。
(もっと読む)
ナビゲーション装置およびその地図表示方法
【課題】 本発明の目的は、車両の状態に応じて、地図の表示を制御するナビゲーション装置の技術を提供することにある。
【解決手段】
移動体に搭載されるナビゲーション装置であって、現在位置を特定する現在位置特定手段を備え、前記現在位置に応じて移動可能な範囲である移動範囲を特定する移動可能範囲特定手段と、前記移動範囲内に、前記移動範囲を拡張可能な所定の設備が存在する場合に、前記移動範囲を拡張する移動範囲拡張手段と、前記移動範囲に応じて地図の表示範囲を設定し、前記移動範囲内の所定の位置の周囲の前記表示範囲内の地図を表示する地図表示手段と、を備えることを特徴とする。
(もっと読む)
ナビゲーション装置、ナビゲーション方法、およびプログラム
【課題】施設を退出後の現在位置検出精度を向上可能なナビゲーション装置、ナビゲーション方法、およびプログラムを提供する。
【解決手段】補正情報DB94には、プローブカー102が施設内を走行したときに補正情報作成車両走行軌跡と、施設を退出したときの位置情報を補正するための補正情報とが関連づけて記憶されている。制御部91では、サービス対象車両2が施設に進入してから施設内を走行した走行軌跡を受信し、受信した走行軌跡と一致する補正情報作成車両走行軌跡があると判断された場合、受信した走行軌跡と一致する補正情報作成車両走行軌跡と関連づけられている補正情報をサービス対象車両2の車載器1に送信する。これにより、プローブカー102が施設を退出したときに現在位置を補正された補正情報を用い、適切に現在位置を補正することができるので、施設退出後の現在位置検出精度を向上することができる。
(もっと読む)
運転支援装置
【課題】GPS非受信区間において、ステレオカメラやLRFなどの距離を計測する距離センサを用いて加速度センサのバイアスを補正する際に、車両の加速度,姿勢の影響により距離センサにノイズが生じ、精度良くバイアスを推定することが難しい。
【解決手段】レーザーレンジファインダやステレオカメラなどの距離センサを用いて、車両周辺に存在する物体表面の複数の点までの距離を計測し、距離センサによる計測分解能が所定の精度以上となる計測範囲を定める最大計測範囲決定手段と、最大計測範囲内で計測した点から特徴点を求める特徴点検出手段と、距離の変動から車両の挙動を逆算する車両並進・回転角計算手段から得られる自車の挙動と、加速度センサの計測値から加速度センサのパラメータを推定するセンサパラメータ推定手段により、加速度センサのバイアスを精度良く推定する。
(もっと読む)
ナビゲーション装置、ナビゲーションシステム、ナビゲーションサーバ、ナビゲーション方法、および、プログラム
【課題】メニュー画面操作時に車両が走行状態になった場合、メニュー画面を退避させて地図表示を行い、当該車両が停止した場合、退避していたメニュー画面を復元してメニュー操作を可能とさせるように表示制御を行うことができるナビゲーション装置、ナビゲーションシステム、ナビゲーションサーバ、ナビゲーション方法、および、プログラムを提供することを課題とする。
【解決手段】本発明は、メニュー画面を表示させ、移動体が移動しているか否か判定し、メニュー画面が表示されている際に、移動体が移動していると判定された場合、メニュー画面を退避させ、地図情報に基づく表示画面を表示させる。
(もっと読む)
無線測位装置及び方法並びにこれを用いる移動端末機
【課題】リソースの制限された移動端末機環境において位置測定の正確性及び迅速性を考慮すると同時に、エネルギーの効率及び使用者の利便性を改善する。
【解決手段】無線測位装置は、特定状況が発生する場合に、Stand−Alone GPS測位モード及びAGPS測位モードを含む測位モードのうち、特定状況に対応する測位モードを判断する測位モード判断部と、判断された測位モードがStand−Alone GPS測位モードであると、予め定められた周期毎にStand−Alone GPS測位を行って位置情報を生成し、判断された測位モードがAGPS測位モードであると、実時間でAGPS測位を行って位置情報を生成する位置情報生成部と、を備える。
(もっと読む)
ナビゲーション装置、及び地図更新方法
【課題】電気自動車において、ナビゲーション装置の地図DBの更新を効率的に行い、ナビゲーション装置の利便性を高める。
【解決手段】電気自動車に搭載されるナビゲーション装置であって、車両の充電が開始されたか否かを判定し、車両の充電が開始された場合に、地図データの更新データを提供する外部システムから前記更新データを受信し、前記受信された更新データで前記地図データを更新する。
(もっと読む)
地上装置
【課題】航空機が送信する信号に含まれる位置情報から、容易な構成で正確に自装置の位置を特定する。
【解決手段】距離特定手段と、位置特定手段とを備える。距離特定手段は、第1信号を送信した航空機の位置である第1送信位置から前記地上装置までの距離と、第1送信位置から移動後に第2信号を送信した当該航空機の位置である第2送信位置から前記地上装置までの距離とをそれぞれ求める。位置特定手段は、前記距離特定手段によって、航空機と前記地上装置との距離が複数求められると、求められた複数の距離を用いて当該地上装置の位置を特定する。
(もっと読む)
ナビゲーションシステム、端末装置、ナビゲーションサーバ、ナビゲーション装置、ナビゲーション方法、および、プログラム
【課題】案内経路上の目的地までに至る途中の地点に測位不能地点がある場合に、当該測位不能地点に関する情報を提示することができるナビゲーションシステム、端末装置、ナビゲーションサーバ、ナビゲーション装置、ナビゲーション方法、および、プログラムを提供することを課題とする。
【解決手段】本発明は、経路探索条件を満たす案内経路をネットワークデータを用いて探索し、案内経路データを少なくとも含む経路案内情報を生成し、利用者の現在位置情報を取得し、取得された現在位置情報および生成された経路案内情報を出力部を介して出力して経路案内を実行し、経路案内中に現在位置情報の取得を失敗した場合、測位失敗地点の座標情報と目的地の座標情報とを対応付けた測位失敗個所情報を生成し、生成された測位失敗個所情報を出力部を介して出力する。
(もっと読む)
移動体位置測定装置
【課題】車載カメラを利用した実時間測位の技術に係わり、安価かつ高精度な測位を実現できる技術を提供する。
【解決手段】本自動車及び車載情報システム100の実時間測位部1は、車載のカメラ4から参照地点付近で撮影された複数の実画像を入力し、その中から特徴部を抽出して第1の特徴情報(c1)とする第1の特徴抽出部11と、地図DB5から対応する第2の特徴情報(c2)を読み出して取得する第2の特徴抽出部12と、第1、第2の特徴情報を入力して特徴部を比較してマッチングすることにより、各特徴部の位置を推定し、当該位置をもとに、SFM手法を用いて、移動に伴う各時点の自車の位置と上記各特徴部の位置との相対的な位置関係を演算することにより、自車現在位置を推定して第2の位置情報(L2)として出力する特徴マッチング部13と、を有する。
(もっと読む)
車載用電子機器及びプログラム
【課題】 トンネル内で道路の分岐がある場合であっても、現在位置を適切に求めること
【解決手段】 データベース19には、トンネル内の道路位置を特定する道路位置情報と、そのトンネル内の分岐点の位置に関する分岐点情報を記憶する。制御部18は、車両から取得する車速情報と経過時間から車両の走行距離を求め、求めた走行距離と道路位置情報に基づき車両の現在位置を求める現在位置算出機能、車両から取得するウインカーのON情報から車両の進路変更の方向を検出する進路変更検出機能、その進路変更検出機能が車両の進路変更の方向を検出し、現在位置算機能が求めた現在位置と分岐点情報で特定される位置が設定距離より近い場合に、その進路変更は分岐点での進路変更と判定する判定機能を備える。現在位置算出機能は、判定機能が分岐点での進路変更と判定した場合、車両がその分岐点で進路変更検出機能が検出した方向に走行するとして現在位置を求める。
(もっと読む)
ナビゲーション装置とその経路探索方法
【課題】 第三国を経由する経路をなるべく避けて誘導するナビゲーション技術を提供する。
【解決手段】
本発明のナビゲーション装置は、道路を構成するリンクのコストに基づいて、所定の出発地から指定された目的地へ到る経路を探索する経路探索手段と、前記経路探索手段により経路を探索する処理において、前記出発地が属する国または地域と、前記目的地が属する国または地域と、を除く他の国または地域である第三国へ進入するリンクのコストを、所定の基準に従い重み付けするコスト調整手段と、を備えることを特徴とする。
(もっと読む)
測位精度判定装置
【課題】GPS測位の位置誤差の大小が判定できる測位精度判定装置を提供する。
【解決手段】速度センサ2による速度センサ由来速度と衛星測位速度演算部6による衛星測位速度とドップラー速度演算部7によるドップラー速度と加速度センサ由来速度演算部8による加速度センサ由来速度についてそれぞれ移動距離を演算する移動距離演算部9と、衛星測位速度から得た移動距離と他の移動距離とのの差を演算し、差が閾値より大のとき、GPS測位精度が低下していると判定する精度判定部10とを備える。
(もっと読む)
ナビゲーション装置およびその目的地の設定方法
【課題】 本発明の目的は、目的地を設定する際に、目的に合うか否かを示すことができるナビゲーション技術を提供することにある。
【解決手段】
本発明に係るナビゲーション装置は、目的の入力を受け付ける目的入力受付手段と、施設を指定する情報の入力を受け付ける施設指定受付手段と、前記施設指定受付手段により受け付けた施設が、前記目的入力受付手段により受け付けた目的に合うか否かを判定する判定手段と、前記判定手段により前記目的に合わないと判定された場合に、注意喚起の出力を行う注意喚起出力手段と、を備えることを特徴とする。
(もっと読む)
241 - 260 / 2,582
[ Back to top ]