
Fターム[2F129BB41]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正対象 (3,438) | オフセット (104)
Fターム[2F129BB41]に分類される特許
61 - 80 / 104
移動体用測位装置

【課題】衛星電波の受信状態に応じた適切な誤差分散を用いて移動体の位置を測位すること。
【解決手段】本発明による移動体用測位装置は、慣性航法により前記移動体の位置を測位する慣性航法測位手段と、衛星航法により前記移動体の位置を測位する衛星航法測位手段と、前記衛星航法測位手段の測位結果と前記慣性航法測位手段の測位結果との関係を観測量とし、前記慣性航法測位手段で用いられる補正パラメータを状態量として、前記衛星航法測位手段の測位結果の誤差分散を用いて、前記状態量を推定する状態量推定手段と、前記状態量推定手段により推定された状態量を前記慣性航法測位手段の測位に反映させる手段と、前記移動体で受信される衛星電波の受信状態に応じて前記誤差分散を補正する補正手段とを備えることを特徴とする。
(もっと読む)
位置検出装置及び位置検出方法

【目的】GPS出力データの各成分について信頼度の有無及び誤差指標に基づいて補正処理を行って位置決定精度を向上する「位置検出装置及び位置検出方法」を提供することである。
【構成】GPSの測位周期で該GPSにより測定される車両の各方向位置成分データ及び速度成分データを用いて自律航法による位置計算結果及び該自律航法の位置計算に使用する車両速度、ピッチ角、センサー取り付け姿勢角を補正する補正処理を行い、GPSにより測定される車両の各方向の位置成分データ及び速度成分データの信頼度を判定すると共に、信頼度ありと判定された成分の誤差指標を算出し、信頼度が無いと判定された測定成分の補正処理における貢献度を零あるいは略零にし、信頼度有りと判定された測定成分の補正処理における貢献度を誤差指標の大きさに応じて小さくする。
(もっと読む)
ナビゲーション装置、ナビゲーション方法、及び、ナビゲーションプログラム
【課題】自車の走行車線を考慮した上で、最適な経路を提供することのできるナビゲーション装置を提供する。
【解決手段】ナビゲーション装置は、道路データに基づいて目的地までの最適な経路案内を行うナビゲーション装置であって、自車位置及び速度を検出する測位部と、前記測位部により検出した自車位置から自車の走行車線を特定する車線判定部と、道路データに基づいて、目的地までの最適な経路コストを有する第一経路と、前記車線判定部により特定した自車の走行車線を考慮した第二経路とを探索する経路探索部と、前記車線判定部によって特定した走行車線と、前記自車位置とに基づいて修正された経路コストについて、前記第一経路と前記第二経路との評価を行う経路評価部と、前記第一経路又は第二経路のうち、少なくとも評価が高い方の経路を表示する経路表示部とを備える。
(もっと読む)
ナビゲーション装置及びナビゲーション方法
【課題】自立航法を主とするハイブリッド航法による経路誘導中に、自車がフェリーなどに乗船して移動し、降船したとき、より簡便で、かつ迅速に正しい自車位置や自車方位に更新することができる「ナビゲーション装置及びナビゲーション方法」を提供すること。
【解決手段】制御手段12は、自立航法を主とするハイブリッド航法により経路誘導中に、第1の測位手段4により検出される位置及び方位を更新して記憶させる。そして、自車が移動物体に乗ったときに、衛星航法に切り換えて、記憶した方位の更新を停止するとともに、第2の測位手段3により検出される位置及び方位を取得し、自車が移動物体から降りたときに、自立航法を主とするハイブリッド航法に切り換えて、最後に取得した衛星航法に基づく位置及び方位を用いて記憶した位置及び方位を更新する。以降は、更新した位置及び方位を基礎として経路誘導を行う。
(もっと読む)
停止判断装置、ナビゲーション装置、停止判断方法、停止判断プログラムおよび記録媒体
【課題】移動体が停止したか否かを精度よく判断すること。
【解決手段】ナビゲーション装置100の停止判断部110は、自装置が搭載された移動体が停止しているか否かを判断する。撮影部111は、移動体の移動に応じて撮影画像に変化が生じる方向に向けられている。移動速度情報取得部112は、移動体の移動速度情報を取得する。判断部113は、撮影部111によって撮影された撮影画像の変化の有無に基づいて、移動体が停止しているか否かを判断する。補正量取得部121は、判断部113による判断結果に基づいて、移動体の移動状態を検出するセンサ131からの出力信号を補正するための補正量を取得する。補正部123は、補正量を用いてセンサ131からの出力信号を補正する。算出部124は、補正部123によって補正されたセンサ131からの出力信号を用いて移動体の現在位置を算出する。
(もっと読む)
携帯方位算出装置と携帯方位算出装置における方位補正方法
【課題】地磁気センサを用いて精度良く方位を求めることができる携帯方位算出装置を提供する。また、携帯方位算出装置においてより精度よく方位を求めることを可能にする方位補正方法を提供する。
【解決手段】地磁気を検出する地磁気センサ158と、地磁気センサ158の検出値に基づいて地理的方位を算出する制御部160と、制御部160が算出した地理的方位を方位の情報として表示する表示部155と、地磁気センサ158と、制御部160と、表示部155とを内蔵する筐体とを有し、筐体に内蔵されて、制御部160により制御される電子部品をさらに有し、制御部160は、電子部品の動作を変化させるプログラム処理を実行可能であり、方位の情報を表示部155に表示しているとき、プログラム処理の開始あるいは終了を監視し、当該プログラム処理の開始あるいは終了に応じて地理的方位を補正する。
(もっと読む)
位置検出携帯端末装置、方位決定方法および方位決定プログラム
【課題】装着者の体の向きとしての方位を簡易に決定すること。
【解決手段】磁気センサから所定の時間ごとに地磁気ベクトルを取得し、当該所定の時間における地磁気ベクトルの大きさの変化量である地磁気変化量を算出し、算出された地磁気変化量が所定の閾値の範囲内である場合は、磁気センサが取得した地磁気ベクトルから装着者の方位を決定する。また、当該地磁気変化量が当該所定の閾値の範囲外である場合は、当該所定の閾値の範囲内の地磁気変化量を示した最新の地磁気ベクトルから決定された方位である最新方位を装着者の方位として採用して決定する。あるいは、最新方位にジャイロセンサによって取得された回転量を加算した方位である回転量加算方位を装着者の方位として決定する。
(もっと読む)
位置検出装置及び位置検出方法
【目的】位置検出精度を維持しつつ、CPUの負荷を軽減する「位置検出装置及び位置検出方法」を提供することである。
【構成】車両の現在位置を検出する位置検出装置において、自律航法部は第1の周期で高速に自律航法に基づいて位置計算し、補正部は、該第1の周期以上の長さの第2の周期で自律航法位置計算に使用する車両速度、ピッチ角、センサー取り付け姿勢角などを補正する第1補正処理を行ない、かつ、GPSの測位周期である第3の周期でGPSデータを用いて自律航法による計算結果を補正する第2補正処理を行う。周期制御部は、補正対象の推定誤差を算出し、該推定誤差と目標誤差の差分に基づいて少なくとも第1、第2周期を制御する。
(もっと読む)
車両用角速度センサの零点補正装置
【課題】車両に搭載される角速度センサの零点補正精度を向上させるとともに、車両が実際に使用されている状態での零点補正処理の頻度を上げる。
【解決手段】オフディレイ回路42は、イグニッションスイッチ50のオフ後にオン状態になっている所定時間にバッテリ40からイグニッションスイッチ50を迂回して3軸角速度センサ22、3軸加速度センサ24に電源+Bを供給する。この所定時間に車両停止状態検知センサ14(例えば、燃料計)の出力変化に基づいて車両が停止していると判断したとき、零点補正手段30が、3軸角速度センサ22の出力を更新後の零点補正値として記憶手段28に記憶し、更新後の零点補正値により3軸角速度センサ22の検出値を補正する。
(もっと読む)
センサバイアスを打ち消す慣性測定システム及び方法
【課題】固定のバイアスオフセットが打ち消される新規で且つ改良されたシステム及び方法を提供する。
【解決手段】ジャイロスコープがその入力軸に垂直な軸の周りで周期的にディザを受け、ジャイロスコープからの信号を遅延して、ディザ周期の半分だけジャイロスコープ信号より遅れる遅延信号を発生し、そしてその遅延信号と、ジャイロスコープからの信号とを合成して、バイアスが打ち消された出力信号を発生する慣性測定システム及び方法。
(もっと読む)
マルチセンサデータの収集/処理
ここに開示される主題は、デバイス内のマルチプルセンサの制御および利用に関するものである。例えば、デバイスの動きはデバイス内に配置された第1センサからの信号受信に応答して検出することができ、そのデバイス内に配置された第2センサのパワー状況は検出された動きに応答して変化させることができる。 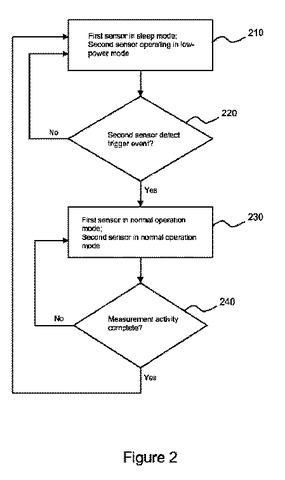 (もっと読む)
(もっと読む)
2次元上を動く物体の経路の検出装置および検出方法
本発明は、平面または2次元表面において、または平面または2次元表面に沿って動く生物または物体の反復動作による経路の2次元での再構築方法であって、下記ステップを含む。
−前記生物または物体に結合されまたは配置された2軸または3軸の磁気計の少なくとも2軸における地磁気フィールドの少なくとも2つの変化投影成分の計測と、
−前記磁気計の少なくとも一つの軸に沿った少なくとも一つの前記変化成分の計測に対応する信号の周期または周波数の計測と、
−前記磁気計の少なくとも二つの軸に沿った少なくとも二つのフィールドの計測からの動作の方位、または方向の計測と、
−一方では周期または周波数の、他方では方位または方向の計測からの前記経路の再構築。
(もっと読む)
センサ誤差推定装置及び観測装置及び方法及びプログラム
【課題】計測誤差を推定し、推定した計測誤差で計測量を補正する観測装置において、誤差推定の進捗度を正しく見積もる。
【解決手段】誤差推定部130は、距離及び距離変化率観測部112が観測した擬似距離などに基づいて、車速パルス発生器121・ジャイロスコープ122などが計測した速度・角速度などの計測誤差を推定し、推定した計測誤差の推定誤差を算出する。進捗度算出部151は、誤差推定部130が算出した推定誤差に基づいて、誤差推定の進捗度を算出する。
(もっと読む)
ナビゲーションシステム、およびGPS測位解精度判定方法
【課題】マルチパスやCWノイズ等の影響によるGPS測位解の精度低下を検知する。
【解決手段】複数のGPS衛星を捕捉・追尾し測位を行ってGPS測位解を取得するGPS測位解取得手段と、自律航法のための自律航法情報を出力する情報出力手段と、該出力された自律航法情報と該GPS測位解との比較結果に基づいて所定の参照値を算出する参照値算出手段と、該算出された所定の参照値と、該測位の過程で得られるクロック・オフセット値との差分を算出する差分算出手段とを具備し、該算出される差分に基づいて該GPS測位解の精度を判断するナビゲーションシステムを提供する。
(もっと読む)
ジャイロセンサモジュールおよび角速度検出方法
【課題】検出軸の取付角度の変化にかかわらず、検出精度の向上したジャイロセンサモジュールおよび角速度検出方法を提供すること。
【解決手段】センサ出力補正回路32に含まれる第1、第2のオフセット調整回路36,37によって、第1角速度ω1および第2角速度ω2を、車両が停止している時の第1のジャイロセンサ10の補正値B1および第2のジャイロセンサ20の補正値B2を減じることによって、第1角速度ω1”および第2角速度ω2”に換算できる。したがって、車両の移動時のより正確な第1角速度ω1”および第2角速度ω2”を得ることができる。
(もっと読む)
移動体位置測位装置
【課題】停車判定を適切に行い、停車状態に起因した移動体位置情報の変動を適切に防止すること。
【解決手段】本発明による移動体位置測位装置は、衛星航法と慣性航法とを併用して移動体位置情報を導出する移動体位置情報導出手段と、加速度センサ及び/又は角速度センサの出力値に基づいて移動体が停止しているか否かを判定する第1移動体停止判定手段と、車速を表すことができる車載センサの出力値等に基づいて移動体が停止しているか否かを判定する第2移動体停止判定手段と、前記第1移動体停止判定手段により移動体が停止していると判定されたとき、そのときの前記移動体位置情報を記憶する記憶手段と、前記第1移動体停止判定手段により移動体が停止していると判定された後に前記第2移動体停止判定手段により移動体が停止していると判定された場合に、前記記憶手段に記憶された移動体位置情報を、現在の移動体位置情報として出力する。
(もっと読む)
車載用ナビゲーション装置、方法及びプログラム
【課題】車載用ナビゲーション装置に関する技術において、車両走行中にいつでも振動ジャイロセンサの0点電圧を高精度に検出可能とする。
【解決手段】0点電圧推定部7は、振動ジャイロからの方位出力値と、GPSによる自車位置情報との相関をもとに、新たな0点電圧を求める。この際、自車位置情報は、GPSで受信した情報により算出した角速度であり、また、新たな0点電圧の値は、その角速度と前記方位出力値とが最大相関となる同一の時間区間内における角速度と方位出力値と、をもとに算出する。具体的には、その0点電圧は、角速度と方位出力値の、それぞれの平均値と標準偏差値から算出する。
(もっと読む)
ナビゲーション装置、ナビゲーション情報算出方法及びナビゲーション情報算出プログラム
【課題】本発明は、車両に対する加速度センサの取付角度を高精度に予め算出し得、衛星からの信号を受信できないときでも、車両の速度及び現在位置を高精度に算出できるようにする。
【解決手段】本発明は、車両の速度に応じて進行方向加速度αxを算出し、車両の速度及び方位に応じて横方向加速度αyを算出し、車両の運動化速度α及び重力加速度gを観測し、気圧値PRに応じて算出した路面の高度差ΔHと車両の速度Vに応じた進行距離Lmとに基づいて路面の進行方向に対する傾斜角度θを算出し、進行方向加速度αx、横方向加速度αy、実際の進行方向加速度及び横方向加速度の観測値AD、傾斜角度θにより表される多次元の関数式fx、fy、fzに基づいて、加速度センサ5の車両に対する取付角度を求める。
(もっと読む)
ナビゲーション装置、ナビゲーション制御方法及びナビゲーション制御プログラム
【課題】本発明は、衛星からの信号を受信できないときであっても、信頼性の高い高精度な移動体の現在位置を提示できるようにする。
【解決手段】本発明は、衛星からの信号を受信していたときに予め学習しておいた加速度センサの移動体に対する取付角度の学習程度が高ければ、その学習結果を用いた推定した自律速度の信頼性が高いと考え、その自律速度をナビゲーション動作に用い、学習程度が低ければ自律速度の信頼性が低いと考え、その自律速度を用いるのではなく、衛星からの受信情報に基づいて算出された移動体の走行速度をナビゲーション動作に用いるように切り換えることができるので、ナビゲーション動作の信頼性を一段と向上させることができる。
(もっと読む)
運転情報記録装置
【課題】 取付けの自由度を高め、作業工数を極力小さくすることができる運転情報記録装置を提供する。
【解決手段】 CPUは3軸方向の各Gセンサ出力値をチェックし、車両の前後方向および左右方向のGセンサ出力軸を確定すべく、Gセンサ出力値の大きい軸つまり縦方向の軸を破棄する。次にオフセット調整を実行し、CPUは使用する2軸を確定する。
(もっと読む)
61 - 80 / 104
[ Back to top ]