
Fターム[2G051AC19]の内容
光学的手段による材料の調査の特殊な応用 (70,229) | 調査・分析手法 (2,013) | 調査、分析手段の移送;ハンドリング (319) | ロボットアームの使用 (60)
Fターム[2G051AC19]に分類される特許
1 - 20 / 60
原子力容器の外観検査のためのシステムおよび装置
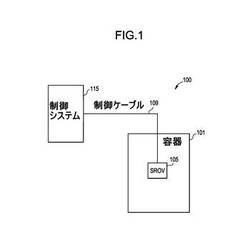
【課題】原子力容器の外観検査のためのシステムおよび装置を提供する。
【解決手段】システムは、原子力容器101の中の領域へ移動可能である、潜水可能に遠隔作動される車両(SROV)システム105を含む。SROVシステム105は、原子力容器コンポーネントの外観検査のための操縦可能な検査カメラ組立体を含み、検査カメラ組立体は、SROVシステム105に関連して操縦可能である。また、システムは、原子力容器の中の領域から離れた領域に配置された制御システム115も含む。制御システム115は、SROVシステム105の移動および検査カメラ組立体の操縦を制御するように構成されている。
(もっと読む)
伝熱管の検査装置および検査方法

【課題】検査プローブと伝熱管との中心軸を合わせること。
【解決手段】伝熱管5が開口する管板4の管板面に固定される検査ロボットに設けられ、伝熱管5に挿入される検査プローブ30を自身の中心軸C1に沿って挿通案内する筒状のガイド部材222と、検査ロボットに設けられ、ガイド部材222の中心軸C1に対して自身の中心軸C3を平行とするとともに、各中心軸C1,C3が伝熱管5の配列間隔を基準とした間隔で配置されており、かつ伝熱管5に対して嵌合可能に設けられた嵌合部2232cと、嵌合部2232cの中心軸C3に沿って当該嵌合部2232cを移動させる移動手段224と、を備える。
(もっと読む)
基板マクロ検査装置及びカラーフィルタ製造装置
【課題】設置スペースを抑制した検査ステージを備えたマクロ検査装置を提供する。
【解決手段】基板を目視によって検査する場合に用いられるマクロ検査装置であって、基板を搬送する搬送ラインの横に配置し、少なくとも、基板の1つの基板端を吸着及び吸着解除する基板端吸着及び吸着解除手段と、前記基板端吸着及び吸着解除手段をスライドする手段と、前記基板端が吸着された基板をスライドする際には浮上させ、スライドした後には浮上を解除し吸着する浮上吸着手段と、を有する検査ステージを備えたことを特徴とする基板マクロ検査装置。
(もっと読む)
多重測定を使用して表面特性を決定するための装置および方法
【課題】高反射性面の表面特性測定に適した装置および
方法を提供する。
【解決手段】測定面(10)は少なくとも1つの放射線装置(2)によって照射され、測定面で散乱された前記放射線のうち少なくとも1つの測定信号を出力する少なくとも1つの第1の放射線検出装置(4)とを備え、前記測定面(10)の光沢度測定を実施するための第2の放射線装置(12)と第2の放射線検出装置(14)とを含む。前記第2の放射線装置(12)は、前記測定面(10)に所定の入射角(a)で放射を行い、前記第2の放射線検出装置(14)は少なくとも前記第2の放射線装置(2)によって照射され、その後に、前記測定面(10)から反射された前記放射線の少なくとも一部を受信する。本発明によれば、前記第2の放射線装置(12)が前記測定面に放射するにあたり、前記測定面(10)に垂直な方向(M)に対して形成される前記入射角(a)が50°以下である。
(もっと読む)
表面欠陥の検査装置
【課題】ワーク表面に存在する表面欠陥と水滴を精度良く判別することにより、表面欠陥の検出精度の向上を実現させた表面欠陥の検査装置を提供する。
【解決手段】表面欠陥の検出対象たるワーク10の被検査面10aに対して照明光を照射する照明装置3と、被検査面10aを撮像するカメラ2と、該カメラ2により撮像した画像データを画像処理してワーク10の被検査面10aにおける表面欠陥5を検出する画像処理装置4と、を備える表面欠陥検査装置1であって、照明装置3は、被検査面10aに対して拡散反射させた照明光である拡散照明光Xを照射し、かつ、画像処理装置4は、照明装置3により拡散照明光Xが照射された被検査面10aをカメラ2により撮像した画像データに基づいて、ワーク10の被検査面10aにおける表面欠陥5を検出する。
(もっと読む)
追跡ロボット装置、追跡ロボット制御方法、追跡ロボット制御プログラム、ホモグラフィー行列取得装置、ホモグラフィー行列取得方法、およびホモグラフィー行列取得プログラム
【課題】リアルタイム性を確保し且つ安定性の高いトラッキングを行う。
【解決手段】ホモグラフィー行列取得装置30は、撮像装置11が出力する画像データを取り込む。ホモグラフィー行列取得装置30は、画像データごとに局所的ホモグラフィー行列を計算し、また、その計算レートよりも低いレートで、大域的ホモグラフィー行列を計算する。ホモグラフィー行列取得装置30は、画像データごとに、局所的ホモグラフィー行列を用いて画像データを変換し、参照画像との相関を求める。相関が高い場合は、当該画像データに対応して計算した局所的ホモグラフィー行列が読み出されるように制御する一方、相関が低い場合は、最新の大域的ホモグラフィー行列が読み出されるように制御する。ロボット制御装置45は、ホモグラフィー行列取得装置30からホモグラフィー行列データを読み込んでロボット本体12の姿勢を計算し動作を制御する。
(もっと読む)
検査装置
【課題】コストを抑制しながら検査精度を向上させる。
【解決手段】スコープ本体21のロッド部材23には照明ユニット25が設けられ、スコープ本体21の先端部28には反射板27が設けられる。また、照明ユニット25と反射板27との間に位置する挿入軸26には受光窓31が形成される。検査時には、受光窓31が隙間Xに対向するまで、吸排気ポート12,13にスコープ本体21の先端部28が挿入される。そして、照明ユニット25からスコープ本体21の先端部28に向けて光が照射され、この光は反射板27を介して吸排気ポート12,13のポート内壁面33に照射される。このように、簡単な構成によって吸排気ポート12,13の内部からポート内壁面33を照らすことができ、コストを抑制しながら検査精度を高めることが可能となる。
(もっと読む)
水中航走体、管内調査システム、水中航走体の上昇及び下降制御方法、及び管内調査方法。
【課題】水中ケーブルを曳航しながら航走する水中航走体と、その支援システム等の小型化と制御の簡単化を図ることができる、水中航走体、管内調査システム、水中航走体の上昇及び下降制御方法、及び、管内調査方法を提供する。
【解決手段】水中ケーブル42の接続点Pを航走用推進器22の推進軸の軸線Cから上下方向に関して距離Hを置いて設けるとともに、航走用推進器22が発生する推進力Tによって発生する接続点P回りの第1モーメントM1と、水中航走体20の水中重量の沈下力Wt又は浮上力Ftによって発生する接続点P回りの第2モーメントM2とが、推進力Tが予め設定した設定推進力T0であるときに等しくなるように、水中重量の沈下力Wt又は浮上力Ftを設定し、水中航走体20の上昇又は下降の制御を、航走用推進器22の推進力Tの増減によって行う。
(もっと読む)
表面検査装置
【課題】角度検出感度を向上させるとともに、検出可能な角度範囲を広くする。
【解決手段】波長域が互いに異なる山形輝度分布が互いに重なり合うように帯状面光源を構成し、各波長域の撮影画像の該山形輝度分布に対応する画素値分布に基づいて検査面の角度を2段階で検出する。第1段階では、R、G、Bの画素値間の大小関係と曲線近似情報とに基づいて、光源面上周期内参照光位置xを決定し、第2段階では、明度の値と曲線近似情報とに基づいて、周期内参照光位置xがどの周期iに属するか、すなわち、周期始点位置Xiを求める。次いで参照光位置X=Xi+xを検査ラインでの検出角に変換する。
(もっと読む)
橋梁点検装置
【課題】 橋梁下面の外観検査を、作業員が容易かつ効率的に行うことができ、なおかつ一定以上の検査精度を確保することができる橋梁点検装置を提供する。
【解決手段】 橋梁100上に配置される支持体2と、支持体2に支持される形で橋梁100上からその側方に向けて延出し、橋梁100の側方外側を回り込む形で、延出先端部のカメラ4を橋梁100の下面よりも下側に位置させる屈曲変形可能なアーム部材3を備え、カメラ4によりによって橋梁100の下面を少なくとも正対方向Qとは異なる斜め方向Pから撮影された場合であっても、その橋梁下面画像を補正して、正対方向Qから見た正対画像とすることができ、これを表示出力することができる。
(もっと読む)
欠陥検出方法および欠陥検出装置
【課題】簡易な装置を用いて、複雑な形状のワークに対しても、精度良く欠陥を検出することができる欠陥検出方法および欠陥検出装置を提供することを目的としている。
【解決手段】視点S1から撮像した検査画像G1と、視点S2から撮像した検査画像G2と、視点S1から撮像した良品画像L1と、視点S2から撮像した良品画像L2と、を取得して、検査画像G1と良品画像L1の、輝度比R1を表した画像である第一のコントラスト画像C1と、検査画像G2と良品画像L2の輝度比R2を表した画像である第二のコントラスト画像C2と、を生成するとともに、各コントラスト画像C1・C2の輝度比の差分ΔRを表した差分画像ΔCを生成して、差分画像ΔCにおいて、輝度比の差分ΔRが閾値αを越えている各画素8a・8a・・・を検出するとともに、検出した各画素8a・8a・・・が連続する範囲の面積が、閾値βを越えている範囲を欠陥部として検出する。
(もっと読む)
視覚検査システム
【課題】ワークに対してカメラを任意の位置、姿勢に移動させながら視覚検査を行うことができるものであって、設備全体の小型化を図る。
【解決手段】支持台2上にYZロボット3を設け、その前方に回転テーブル4を設ける。YZロボット3は、Z軸移動機構5、Y軸移動機構6、前後(Y軸)方向に延びる光軸Oを有しワークWを撮影するカメラ7を備え、カメラ7を前後(Y軸)及び上下(Z軸)方向に自在に移動させる。回転テーブル4は、ワークWを載置し、垂直方向に延びる回転軸θ周りに自在に回転させる。カメラ7の先端に180度以上の画角を有する超広角レンズ10を設ける。
(もっと読む)
タイヤの目視検査のための保持装置
筒状体の内部検査装置及びその内部検査方法
【課題】チューブのような筒状体の搬送効率を低下させることなく、筒状体の内部について精密な品質検査を行うことができる技術を提供する。
【解決手段】内部検査装置1は、搬送されるチューブ10に対して撮像ユニット6を用いてチューブ10の内部を撮像し、撮像された画像からチューブ10の内部についての品質を検査する。チューブ10は、これを水平に寝かされた姿勢で支持部材14に支持されており、軸線方向でみた開口の向きと高さ方向でみた軸線の位置が一様に揃えられている。撮像を開始する前にチューブ10は、位置決め機構4を用いてチューブ10の開口の位置が揃えられる。ボアスコープ34は、チューブ10の開口から内部へ向けて軸線に沿って移動しながらチューブ10の内面を撮像する。撮像して得られた画像に基づき、チューブ10の内面についての品質を検査することができる。
(もっと読む)
被覆電線検査装置及びこれを備えた電線処理機
【課題】被覆が剥離された被覆電線端部の良否をより一層的確に検査することのできる被覆電線検査装置を提供する。
【解決手段】被覆が剥離された被覆電線Rの端部の状態を検査する被覆電線検査装置Bであって、前記被覆電線Rを搬送する搬送ユニットと、被覆が剥離された前記被覆電線Rの芯線Sを撮像する撮像手段3a、3bと、該撮像手段3a、3bにより撮像された画像に基づいて前記剥離の良否を判定する判定手段6と、該判定手段6による判定が不良であった場合に、前記剥離の良否を目視で判定すべく、前記被覆電線Rを前記搬送ユニットにより前記撮像手段3a、3b側に搬送させて、該撮像手段3a、3bにより再度撮像される前記芯線Sの画像を表示する表示手段7とを備えている。
(もっと読む)
表面検査装置
【課題】ウェハ10の回転精度を向上させた表面検査装置を提供する。
【解決手段】表面検査装置1は、ウェハ10を保持して回転可能なウェハホルダ28と、ウェハホルダ28に保持されて回転するウェハ10のアペックス部13を連続的に撮像する撮像部35と、ウェハホルダ28の回転軸と垂直な方向へ2次元的にウェハホルダ28を相対移動させるXYステージ21と、ウェハ10の中心C1とウェハホルダ28の回転中心C2との間のオフセットDを測定するためのステージアライメント用センサ30と、ステージアライメント用センサ30を用いて測定したオフセットDに応じて、撮像部35がウェハ10のアペックス部13を連続的に撮像できるようにXYステージ21の作動を制御する制御部45とを備え、制御部45は、ウェハホルダ28の回転中心C2の移動軌跡Tが円弧状となるようにXYステージ21の作動を制御する。
(もっと読む)
塗布状態検査方法
【課題】粘性材料が濡れ広がり易い材質からなる場合や、光の反射が不順になり易い材質からなる場合であっても、塗布対象上への塗布状態の正確な検査結果を得ることができる塗布状態検査方法を提供することを目的とする。
【解決手段】基板Pb上に所定の描画パターンで塗布されたペーストPstを撮像してその画像を取り込んだ後(ステップST1)、その取り込んだ画像に基づいて、基板Pb上に塗布されたペーストPstの輪郭Gを抽出し(ステップST2)、その抽出したペーストPstの輪郭GからペーストPstの輪郭長を求める(ステップST3)。そして、求めたペーストPstの輪郭長をそのペーストPstの描画パターンに対応して定められた輪郭長の基準範囲と比較し、ペーストPstの輪郭長が基準範囲内にあるかどうかの判定を行って(ステップST4〜ST6)、ペーストPstの塗布状態の良否判断を行う(ステップST7及びST8)。
(もっと読む)
検査システム
【課題】問題が発生した場合にその原因を把握して、検査装置の復旧を迅速に行う。
【解決手段】被検査物を搬送する搬送装置と、前記被検査物を検査する検査装置とを備えた検査システムである。前記検査装置は、全体的な動作状況、検査の進行状況等が表示される操作状況等表示部と、前記検査装置の制御部及び前記搬送装置の制御部で同期させて進行されるタイミングチャートの処理状況をリアルタイムの映像として表示するハンドシェイク図表示部と、現在の動作状況及び問題発生時の状況を文章で表示する動作コメント表示部とを備えた。
(もっと読む)
ワーク識別方法およびワーク識別装置
【課題】カメラ画像からワークの種類および姿勢を認識するときの処理時間を短縮する。
【解決手段】ワークWiは外面Fごとに方向性を有する識別可能なマークCが付与され、ロボット10は前記マークCおよび前記ワークWiを撮像する撮像手段12と前記マークCが撮像されたマークマスタ画像Mを格納する第1マスタ画像格納手段42と、前記ワークWiが撮像された前記ワークWiの姿勢ごとのワークマスタ画像Nを格納する第2マスタ画像格納手段43とを有し、上記画像を取り込む画像入力工程S3と、前記マーク画像Pと前記マークマスタ画像Mとを比較する第1画像比較工程S4と、その結果から前記ワークWiの姿勢を判定する姿勢判定工程S5と、判定結果の姿勢に対応する前記ワークマスタ画像Nと前記ワーク画像Rとを比較する第2画像比較工程S6と、その結果から前記ワークWiの種類を判定する種類判定工程S7とを有するワーク識別方法。
(もっと読む)
表面検査装置
【課題】被検査体表面の欠陥部を迅速且つ簡単に高精度で検出する表面検査装置及び表面状態検査方法を提供する。
【解決手段】表面検査装置1は、波長域が互いに異なる複数の光源12、13、14を有する照射部2と、照射部2の複数の光源12、13、14から照射されて検査面Waで反射した反射光を波長域別に分光して撮像する撮像部3とを有し、照射部2は、複数の光源12、13、14が検査面Waに面して順番に隣接して並ぶ構成を有することを特徴としている。これにより、反射光を撮像可能な角度範囲を拡大し、検査面Waに対する照射部2または撮像部3の相対角度の許容誤差範囲を広げて、欠陥部の検出能力を向上させる。
(もっと読む)
1 - 20 / 60
[ Back to top ]