
Fターム[3C007BS02]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | 腕直列配列 (1,746) | 2関節直角座標型 (67)
Fターム[3C007BS02]に分類される特許
1 - 20 / 67
部品実装装置及び部品実装装置の製造方法
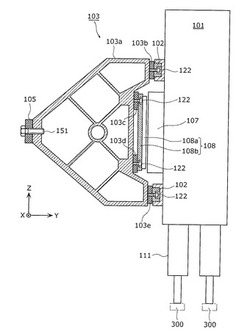
【課題】軽量化を図るとともに、Xビームとレールとの間で発生する反りを抑制することができるXビームを備える部品実装装置を提供する。
【解決手段】レール102とXビーム103とYビーム104とを備える部品実装装置100であって、Xビーム103は、マグネシウムを主成分とする材料からなる本体部103aと、本体部103aとは異なる材料からなり、本体部103aとレール102とを接続する接続部103b、103eであって、Xビーム103のY軸方向の一端部に本体部103aに固定されて配置される接続部103b、103eとを有し、部品実装装置100は、さらに、本体部103aの熱膨張とレール102の熱膨張との差によって発生するXビーム103の反りに抗する補強部材105であって、炭素繊維強化樹脂またはアラミド繊維強化樹脂からなり、Xビーム103のY軸方向の他端部に取り付けられる補強部材105を備える。
(もっと読む)
位置決め装置およびロボットハンド

【課題】或平面上で台座を移動させる位置決め装置およびこの位置決め装置を備えたロボットハンドであって、位置決め装置が具備する第1方向への駆動部と第2方向への駆動部とが共に基台に対して位置固定可能であるものを提供する。
【解決手段】位置決め装置10の基台11に、X方向を軸方向として支承されたXネジ軸12およびスプライン軸13と、Xネジ軸12を回転駆動するX軸駆動部14と、スプライン軸13を回転駆動するY軸駆動部15とを設ける。Xネジ軸12上にYネジ軸22が支承されたX出力台座20を設け、Yネジ軸22上にY出力台座24を設ける。スプライン軸13とYネジ軸22との間に、X出力台座20と一体的に移動し且つスプライン軸13からYネジ軸22へ動力を伝達する動力伝達機構30を設ける。
(もっと読む)
部品実装装置及び部品実装装置の製造方法
【課題】軽量化を図るとともに、ヘッドを精度良く位置決めすることができるXビームを備える部品実装装置を提供する。
【解決手段】ヘッド101をX軸方向に摺動自在に案内するX軸方向に延びて配置されるレール102と、レール102がY軸方向の一端部に取り付けられX軸方向に延びて配置される棒形状のXビーム103と、Xビーム103をY軸方向に摺動自在に案内するY軸方向に延びて配置されるYビーム104とを備える部品実装装置100であって、Xビーム103は、炭素繊維強化樹脂からなる本体部103aと、本体部103aとレール102とを接続する接続部103b、103eであって、Xビーム103のY軸方向の一端部に本体部103aに固定されて配置される金属製の接続部103b、103eとを有する。
(もっと読む)
基板搬送装置および基板搬送システム
【課題】基板カセットと基板受け渡し先との間でガラス基板の受け渡しを効率良く行うことのできる廉価でコンパクトな構成の基板搬送装置を提案すること。
【解決手段】基板搬送装置2は、ガラス基板7の縁端をクランプしエアー浮上させた状態で、基板カセットからガラス基板7を引き抜くので、狭い間隔で高密度に収納されているガラス基板を引き抜くことができ、エアー浮上状態でガラス基板7を移動させるので、ガラス基板に損傷、異物付着が生じない。基板載置面に引き込まれたガラス基板を基板支持アームで支持し、この状態で基板搬送装置2が収納先の基板カセットまで移動し、基板支持アームによってガラス基板を引き渡し先に渡す。一台で基板カセットからのガラス基板の引き抜き、移送、基板受け渡し先への引き渡しを行うことができ、設置スペースが少なくて済む廉価でコンパクトな基板搬送システムを構築できる。
(もっと読む)
把持ハンド、及び搬送装置
【課題】粘着性を有する物質の付着が低減された把持ハンド、及びその把持ハンドを用いた搬送装置を提供することを目的とする。
【解決手段】被把持部材を挟んで把持するハンド部において、ハンド部の少なくとも被把持部材に接触する部分が、基材21と、多孔質層22と、非粘着層23とで構成される。基材21は、粗面処理され、表面に凹凸形状が形成されている。多孔質層22は、基材21の粗面側に形成された複数の微細孔を有する。非粘着層23は、多孔質層22の表面に形成されている。
(もっと読む)
ロボット設置構造
【課題】作業者の技量に関係なく、ロボットの設置作業を効率よく実施する。
【解決手段】架台は、平板状をなすステージ12を備えており、そのステージ12の上面側にロボット13が設置されている。ロボット13は、ステージ12上に載置された状態で、ステージ下面側から複数のネジ18により固定される。ステージ12には上下に貫通する貫通孔16が設けられている。ロボット底面部には、基準位置としてのネジ孔17が設けられているとともに、マーキングシート20が貼り付けられている。マーキングシート20には、そのネジ孔17に対する方向情報と同ネジ孔17までの離間距離情報とが付与されたマーキングが付されている。
(もっと読む)
ロボット装置およびロボット装置の制御方法
【課題】実作動時において基準となるセンサー検出データと比較し、その検出データの差分から確実な故障判断を行うロボット装置および制御方法を提供する。
【解決手段】アクチュエーターを含む連結装置によりアームが回転もしくは直線移動可能に連結されたロボット装置であって、アームに取り付けられた慣性センサーと、アクチュエーターに備える角度センサーからの回転角度データから、アクチュエーターの角速度および角加速度を演算する第1演算部と、慣性センサーにより検出された出力より、アームの角速度または角加速度を演算する第2演算部と、第1演算部により演算された角速度または角加速度と、第2演算部により演算された角速度または角加速度とを比較する比較部と、比較部においてアクチュエーターとアームの角速度または角加速度との差の絶対値が、閾値より大きい場合に慣性センサーが故障と判定する。
(もっと読む)
グローブボックス、密閉空間作業システム、制御プログラム、グローブ装着検知装置、及び作業機器
【課題】作業機器を設けた作業空間で作業者がグローブを用いて作業を行う場合に、煩雑さを低減させることが可能なグローブボックスを提供する。
【解決手段】グローブボックスの一例であるアイソレータ1は、少なくとも壁面により密閉された作業空間Sを形成するケース3と、ケース3壁面から作業空間Sに向かって延びる形で設けられたグローブ5と、グローブ5への作業者の手の装着状態を検知するグローブ装着状態検知部7と、グローブ装着状態検知部7からの装着情報を、この装着情報に基づき作業空間Sに設けられた作業空間Sで作業を行うために使用される搬送ロボット20を制御する主制御部40に繋がる装着信号受信部40Rへ送信する装着信号送信部7Sと、を備える。これにより、グローブ5の装着情報に基づいて搬送ロボット20が制御され、搬送ロボット20の動作に対する入力操作の煩わしさや操作ミスが低減される。
(もっと読む)
ロボットアーム
【課題】 比較的簡素な構造で緩衝作用が得られる構造を備えるロボットアームの提供。
【解決手段】 XθZ駆動方式ロボットのロボットアームにおいて、θ軸回転手段7で旋回する第1アーム1と、当該第1アーム1の先端部に連結し上下左右に揺動可能な第2アーム2を備えてなり、当該第2アーム2の先端部に作業部を備え、前記第1アーム1の先端部に横揺動軸4を支持し、当該横揺動軸4に前記第2アーム2の基部が支持する縦揺動軸5を支持し、前記第1アーム1と第2アームとの間に緩衝手段6を備え、当該緩衝手段6は、第2アーム2を第1アーム1に対する定常姿勢へ誘導する姿勢維持手段と、第2アーム2を第1アーム1に対する定常姿勢から第2アーム2の先端部を左右及び上方へ誘導可能な退避手段を備えるロボットアーム。
(もっと読む)
移動機構及びこれを用いたピックアンドプレース装置
【課題】 構造が非常にシンプルなピックアンドプレース装置等を提供する。
【解決手段】 ピックアンドプレース装置Aは、タイミングプーリ30をX方向に移動さ
せる移動機構1と、タイミングプーリ30に連結され且つアーム52をZ方向に移動可能
な直進アームモジュール機構2とを備えている。移動機構1は、独立して駆動可能なステッピングモータ10a、10bと、タイミングベルト23a、23bが走行可能なように同モータ10a、10bに連結されたベルト・プーリ20a,20bと、タイミングベルト23a、23bとの間に配置され且つ各ベルトが交差するように掛け回されたタイミングプーリ30と、タイミングプーリ30を軸支するとともに直線上に移動自在に案内する軸ガイド部40とを有している。
(もっと読む)
ワイヤ駆動式ロボット
【課題】 駆動源を可動部に搭載することなく複数方向への移動に対して正確で且つ迅速な制御を行い得る小型のワイヤ駆動式ロボットの提供。
【解決手段】 XθZ駆動方式のワイヤ駆動式ロボットにおいて、ロボットアームを旋回させるθ回転手段を備える昇降ベースと、昇降ベースの昇降軌道をZ軸方向に規制する昇降ガイドと、昇降ガイドを支持する走行ベースと、走行ベースの走行軌道をZ軸と直角なX軸方向に規制する走行ガイドと、走行ガイドを支持するベースフレームと、昇降ベースにZ軸方向への駆動力を与えるワイヤ駆動方式のZ軸駆動手段と、走行ベースにX軸方向への駆動力を与えるワイヤ駆動方式のX軸駆動手段と、
からなり、Z軸駆動手段及びX軸駆動手段の昇降駆動源及び走行駆動源をベースフレームに備えることを特徴とするワイヤ駆動式ロボット。
(もっと読む)
吊り下げ型作業ロボット、及び、吊り下げ型作業ロボットシステム
【課題】回動するアームの先端部にハンドリング装置を備える作業ロボットにおいて、ハンドリング装置における有効作業エリアと可動エリアの同一化を図ることで、作業ロボットの設置スペースの狭小化を実現するとともに、特に、連続的に搬送されるワークについて作業を行う場合において、工程設計の自由度の高い新規な構成を提案する。
【解決手段】水平面内において互いに直行するX軸方向、Y軸方向に移動可能に設けられる第一アーム3と、第一アーム3に対し水平面内においてθ軸方向に回動可能に設けられる第二アーム4と、を有し、前記第二アーム4の先端部にハンドリング装置5が設けられ得る、作業ロボット1とする。
(もっと読む)
視覚検査システム
【課題】ワークに対してカメラを任意の位置、姿勢に移動させながら視覚検査を行うことができるものであって、設備全体の小型化を図る。
【解決手段】支持台2上にYZロボット3を設け、その前方に回転テーブル4を設ける。YZロボット3は、Z軸移動機構5、Y軸移動機構6、前後(Y軸)方向に延びる光軸Oを有しワークWを撮影するカメラ7を備え、カメラ7を前後(Y軸)及び上下(Z軸)方向に自在に移動させる。回転テーブル4は、ワークWを載置し、垂直方向に延びる回転軸θ周りに自在に回転させる。カメラ7の先端に180度以上の画角を有する超広角レンズ10を設ける。
(もっと読む)
ツイストスライド機構及びロボット
【課題】スライド動作の俊敏性を低下させずにツイスト動作の俊敏性を向上させることが可能なツイストスライド機構及びロボットを提供する。
【解決手段】本発明のロボット10は、平行に配置された1対のボール螺子機構40,40における1対のベース駆動用ボールナット42,42を旋回ベース30と連結させた構成とすることで、それらボール螺子機構40,40を駆動する1対のベース駆動用サーボモータ81,81によって旋回ベース30のスライド駆動とツイスト駆動の両方を行うことができる。また、それら1対のベース駆動用サーボモータ81,81が共に固定ベース11に固定されているので、スライド動作の俊敏性の低下させずにツイスト動作の俊敏性を向上させることが可能になる。
(もっと読む)
発塵防止機構を備えた基板搬送装置
【課題】直線的に移動する部材を有するリニア軸においてその近傍からファンを無くすとともに、リニア軸の近傍からファンを廃止しても発塵を防止することができる機構と、それを備えた基板搬送装置を提供すること。
【解決手段】発塵防止機構を、ベース部材134においてスライド部材107の進退方向の前端部分および後端部分に形成された前端開口および後端開口155と、ベース部材134において前端開口と後端開口との間に形成された中央開口156と、前端開口と後端開口との間にあって中央開口156を覆うように設置され、前端と後端とが前端開口と後端開口とにそれぞれ到達する内部カバー171と、前端開口および後端開口をそれぞれ覆う補助カバー172と、によって構成し、スライド部材によるポンプ作用を発生させる。
(もっと読む)
ロボット制御システムおよびロボット制御方法
【課題】ロボットの自動組立を継続して行う際に様々な要因によって生じ得る作業対象部品などの位置ずれによる「チョコ停」の未然防止を可能とするロボット制御システムおよびロボット制御方法を提供する。
【解決手段】ロボット制御方法の一実施形態では、X軸方向、Y軸方向および回転角θについて水平移動可能なX−Y−θステージ9上に載置された部品供給トレイ5に搭載された作業対象部品をロボットハンド31に取り付けられた小型カメラで撮像する。撮像された画像の画像処理によって、次の作業対象部品を検出して正確な位置を算出するとともに、正常位置データとの比較によって位置誤差を算出して、その位置誤差を補正するような指令をX−Y−θステージ9に与える。そのようにして位置誤差が補正された後に、次の作業対象部品に対する作業を実行する。
(もっと読む)
ロボット
【課題】目標とする位置に処理装置を素早く且つ正確に位置させ、所望の処理を行わせることができるロボットを提供する。
【解決手段】対象物Eを把持する把持部10と、対象物Eと把持部10とを相対移動させるアーム20と、把持部10に働く慣性力および対象物Eに働く慣性力の差分を検出する慣性センサー40と、アーム20を制御して把持部10を対象物Eに向けて相対移動させるとともに、慣性センサー40の検出結果を用いて把持部10と対象物Eとの間の相対位置のずれを演算し、演算結果に基づいてアーム20を制御して、ずれが相殺されるように把持部10と対象物Eとの間の相対位置を調節する制御装置60と、を有することを特徴とする。
(もっと読む)
搬送動作ティーチング方法
【課題】実物のワークが無くても、搬送装置に対してティーチングを行うことができ、多種類のワークを対象とする場合でも簡便にティーチングを行うことができ、ワークの把持位置を正確にティーチングすることができ、把持機構の部品を交換した場合の再ティーチングを簡単に行うことができる搬送動作ティーチング方法を提供する。
【解決手段】搬送動作ティーチング方法は、ワーク12を載置するためのパレット14上にある任意の箇所(基準部52)を、ワーク12を搬送する軌跡の基準点として設定する基準点設定工程と、予め、搬送装置10を動作させるための動作情報であって、基準点を原点とした座標系にて、基準点を基準に所定の軌跡に沿ってワーク12を搬送する動作を指示する動作情報を作成する動作情報作成工程と、動作情報に従って動作する搬送装置10に、実際のパレット14上にある基準点をティーチングするティーチング工程とを有する。
(もっと読む)
ノズル吸引式の対象物の搬送装置、搬送方法及びこれらに用いられるプログラム
【課題】磁気ヘッドのスライダチップなどの微小部品のノズル吸引式による搬送装置において、従来の装置構成に変更を加えることなく、自動的に、ノズル吸着位置のずれによる影響を最小限に抑えて搬送不良を防止することができる搬送装置及び搬送方法を提供する。
【解決手段】ノズル吸着位置がずれた場合であっても、ノズルを回転させてノズル吸着位置のずれの影響が最小限となるノズル回転位置を撮像画像から検出し、その回転位置にて搬送を行うことにより、ノズル吸着位置のずれに対する調整を自動的に行うことができる。
(もっと読む)
カッティングプロッタ
【課題】キャリッジを移動可能に支持するガイドレール等に曲がりが発生していても、当該曲がりによる切削加工の品質劣化を防止できるカッティングプロッタを提供する。
【解決手段】シート状の被加工媒体を支持する加工テーブルと、加工テーブルに支持された被加工媒体の上方に設けられ被加工媒体の切削加工を行うエンドミルと、加工テーブルの上方に設けられ、エンドミルを前後、左右、または上下に移動可能に支持するガイドレール31、Yバー32及び切削駆動機構と、エンドミルを前後、左右、または上下に移動させて被加工媒体を切削加工するように制御するコントロールユニット50とを備えたカッティングプロッタにおいて、ガイドレール31及びYバー32の曲がりを検出するキャリッジ形状測定機構100を備え、検出されたガイドレール31及びYバー32の曲がりに基づいて加工具の移動方向を補正する制御が行われる。
(もっと読む)
1 - 20 / 67
[ Back to top ]