
Fターム[3C007BS10]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | 腕直列配列 (1,746) | 関節型 (1,487) | 垂直多関節型 (937)
Fターム[3C007BS10]の下位に属するFターム
Fターム[3C007BS10]に分類される特許
41 - 60 / 620
ロボットの校正装置および校正方法
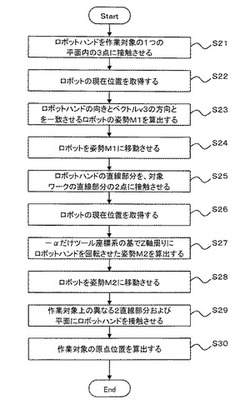
【課題】ロボットの位置決め精度と同等の精度で作業対象とロボットとの校正を実行することができるとともに、校正作業を効率化させることができるロボットの校正装置および校正方法を得る。
【解決手段】ロボットと作業対象20との校正を実行するロボットの校正装置であって、ロボットハンド15と作業対象20との接触を判定する力覚センサ14と、ロボットハンド15と作業対象20との接触時におけるロボットの位置姿勢を取得する位置取得部と、位置取得部で取得された複数のロボットの位置姿勢に基づいて、作業対象20の姿勢をロボット座標系で算出する姿勢算出部と、姿勢算出部で算出された作業対象20の姿勢にロボットを移動させる駆動部と、駆動部により移動された複数のロボットの位置姿勢に基づいて、作業対象20の位置を算出する位置算出部とを備える。
(もっと読む)
長尺材曲げ加工用のロボットハンドおよび長尺材曲げ加工システム

【課題】吸着手段とグリッパとを備えたローディングが可能な長尺材用ロボットハンドの提供と、このロボットハンドを使用した長尺板材曲げ加工システムの提供。
【解決手段】1.ロボットハンド15に吸着手段31とワークの長手方向両端部を把持するグリッパ51とを設け、前記吸着手段をワークの前後方向に移動位置決め可能に設けたことを特徴とする長尺板材曲げ加工用ロボットハンド。2.板材折曲げ加工機へワークを供給するロボットと、掴み換え装置とを備えた長尺板材曲げ加工システムにおいて、前記ロボットハンドがロボットハンド15に吸着手段31とワークの長手方向両端部を把持するグリッパ51とを設け、吸着手段をワークの前後方向に移動位置決め可能に設けてなるこ長尺板材曲げ加工システム。
(もっと読む)
人の動作における意図推定装置
【課題】人の動作において、表面筋電位等の生体信号に頼らずにそれが意図したものであるか否かを識別する。
【解決手段】人の動作している位置、および角度の計測方法を用いて動作情報を取得し(S700)人の動作を人が実現可能な範囲に制限し(S701)、その動作中における人の関節角度と動作している部位の先端位置の位置情報を抽出し(S702〜S703)多変量解析手法を用い(S704〜S709)、さらに人の動作が意図するものであるか否かを識別する閾値を用いて、人の動作がその人が意図するものであるか否かを識別する(S710)ことで、表面筋電位等の生体信号に頼らずに、動作が意図したものであるか否かを識別することを可能にした。
(もっと読む)
ロボット
【課題】電動モータの駆動力の増大を抑制した態様にて、ロボットの伸縮動作を確保すること。
【解決手段】フレーム間の相互変位に応じて伸縮可能に構成されたロボット100であって、ロボット100の基端側から先端側へ順に配置されるべきフレーム14、13、15と、電動モータ1から供給される駆動力に基づいてフレーム13を先端側へ駆動する駆動手段と、駆動手段と協調してフレーム13を先端側へ付勢する付勢手段と、駆動手段及び付勢手段によるフレーム13の先端側への搬送に同調して、前記フレーム13からみてフレーム14、15を互いに逆方向へ搬送する搬送機構と、を備える。例えば、付勢手段は、ガススプリングから構成される。
(もっと読む)
形状計測装置、ロボットシステムおよび形状計測方法
【課題】計測対象物の走査に要する合計の時間を短くすることが可能な形状計測装置を提供する。
【解決手段】このセンサユニット(形状計測装置)4は、レーザ光を照射するレーザ発生器15と、レーザ発生器15から照射されたレーザスリット光をワーク200の載置されている領域に走査するミラー部16と、ミラー部16から照射され、計測対象物により反射されたレーザ光の反射光を検出することにより、ワーク200の載置されている領域を検出するとともに、ワーク200の3次元計測を行う高速カメラ11と、高速カメラ11によって検出されたワーク200の載置されている領域に応じてミラー部16による走査範囲を変更するように制御するセンサコントローラ13とを備える。
(もっと読む)
荷搬送ロボット
【目的】荷物を安定して支持することができる荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体16には、左右一対のアーム17を設けるとともに荷物の下面を支持するための台座部25を突出するように設けた。アーム17は本体16に対し、2つの回転軸にて回転可能な肩18と、肩18に対し1つの回転軸にて回転可能な中腕20と、中腕20に対し1つの回転軸にて回転可能な前腕21とを有している。また前腕21の先端には荷を当接支持する手先部30を設けた。アーム17は肩18、上腕19、中腕20、前腕21を介して手先部30を変位させて荷物を本体16に引寄せるように移動させるとともに、台座部25の上面を荷物の下面に位置させる。荷搬送ロボットは、手先部30にて荷物を当接支持するとともに、台座部25にて荷物の下面を支持するため、荷物を安定して支持することができる。
(もっと読む)
追跡ロボット装置、追跡ロボット制御方法、追跡ロボット制御プログラム、ホモグラフィー行列取得装置、ホモグラフィー行列取得方法、およびホモグラフィー行列取得プログラム
【課題】リアルタイム性を確保し且つ安定性の高いトラッキングを行う。
【解決手段】ホモグラフィー行列取得装置30は、撮像装置11が出力する画像データを取り込む。ホモグラフィー行列取得装置30は、画像データごとに局所的ホモグラフィー行列を計算し、また、その計算レートよりも低いレートで、大域的ホモグラフィー行列を計算する。ホモグラフィー行列取得装置30は、画像データごとに、局所的ホモグラフィー行列を用いて画像データを変換し、参照画像との相関を求める。相関が高い場合は、当該画像データに対応して計算した局所的ホモグラフィー行列が読み出されるように制御する一方、相関が低い場合は、最新の大域的ホモグラフィー行列が読み出されるように制御する。ロボット制御装置45は、ホモグラフィー行列取得装置30からホモグラフィー行列データを読み込んでロボット本体12の姿勢を計算し動作を制御する。
(もっと読む)
ロボットセル
【課題】複数のロボットステーションを組み合わせて構築したロボットセルにおいて、各ロボットステーションのスペース効率の改善、タクトの向上、ロボットステーション内の機材の使用効率の改善を目的とする。
【解決手段】ロボットステーションは、一対のロボットアーム101,102と、ロボットアームのワークスペースに対して撮像面を平行に撮像手段を固定するブース104を備える。撮像手段としてのカメラ106の視野を、隣接するロボットステーションのワークスペースである架台の天盤103aまで広げる。さらに、各ロボットステーションに搭載されるロボットアームの可動範囲を、隣接するロボットステーションのワークスペース内に広げる。
(もっと読む)
荷搬送ロボット
【目的】荷物を安定して支持することができる荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体16には、左右一対のアーム17を設けるとともに荷物の下面を支持するための台座部25を突出するように設けた。アーム17は本体16に対し、2つの回転軸にて回転可能な肩18と、肩18に対し1つの回転軸にて回転可能な中腕20と、中腕20に対し1つの回転軸にて回転可能な前腕21とを有している。また前腕21の先端には荷を当接支持する手先部30を設けた。アーム17は肩18、上腕19、中腕20、前腕21を介して手先部30を変位させて荷物を本体16に引寄せるように移動させるとともに、台座部25の上面を荷物の下面に位置させる。荷搬送ロボットは、手先部30にて荷物を当接支持するとともに、台座部25にて荷物の下面を支持するため、荷物を安定して支持することができる。
(もっと読む)
多関節ロボット
【課題】多関節ロボットにおいて、関節部の内部に収容するケーブルの本数が増えても、ケーブル同士が絡まり合うことなく、円滑に関節部を回転できるようにする。
【解決手段】多関節ロボット1は、回転軸部6Bが、回転軸16aが挿通された状態で関節筐体6b内部に固定され、ケーブルを固定支持する支持板14と、回転軸16aが固定され支持板14と対向するように第3アーム7内部に固定され、ケーブルを第3アーム7内部で固定支持する連結板20と、回転軸16aを周方向に囲む筒状に設けられ、一方の筒端部が連結板20に固定され、他方の筒端部が支持板14の近傍に配置された筒状部材と、を備え、回転軸部6Bには、複数のケーブルと複数の筒状部材が同心状に設置され、筒状部材のそれぞれの外周には、支持板14および連結板20に固定されたケーブルが、筒状部材の外周面から離間した状態で周回して配回された構成とする。
(もっと読む)
ロボット制御装置、ロボットおよびロボット制御装置の教示方法
【課題】撮影動作の教示操作が煩雑になるのを抑制することが可能なロボット制御装置を提供する。
【解決手段】このロボットシステム100は、教示位置の入力と、少なくとも教示位置に対応付けられるコマンド情報の選択とを受け付けて教示位置とコマンド情報とを組み合わせた教示データを作成する教示装置3と、教示データに基づいて動作指令を生成する指令生成部24とを備え、教示装置3により選択されるコマンド情報は、教示位置と、予め設定された教示位置に基づく補助的な動作をロボットに動作させるための補助情報とに対応付けられたステレオ視コマンドを含む。
(もっと読む)
部品組み付け装置及び機械部品の製造方法
【課題】機械部品の取り付け孔にボルトを挿入することが可能な部品組み付け装置及び機械部品の製造方法を提供する。
【解決手段】磁石66を用いてボルトの頭を保持する穴65が形成されたボルト保持部58を有する多関節ロボット11bを備え、
多関節ロボット11bが、ボルト保持部58に保持されたボルトの先端部を被固定部品Aに載せられた固定部品Cの取り付け孔に挿入し、ボルトを傾けて、ボルト保持部58からボルトを分離する。
(もっと読む)
投影面情報提示装置と方法
【課題】ロボットハンドと対象物との相対位置誤差を拡大表示することができ、これにより目視かつ手動操作によりロボットハンドを対象物に対して正確に位置決めすることができる投影面情報提示装置と方法を提供する。
【解決手段】 ロボットハンド12に設けられたプロジェクタ22により、原パターンAを対象物2に固定された投射面3上に投射し(S1)、ロボットハンド12に設けられたカメラ24により、投射された原パターンである投射パターンBを撮影し(S2)、撮影した投射パターンである撮影パターンCを、ロボットハンド12が対象物2に対し予め設定した位置と姿勢をとる基準位置において、原パターンAと一致するように変形し(S3)、変形した変形パターンDを原パターンAに重畳する(S5)。(S1)〜(S5)を順に繰り返す。
(もっと読む)
ロボット
【課題】線条体の寿命を延ばすことが可能なロボットを提供する。
【解決手段】ベース12と、ベース12に旋回可能に設けられた旋回部13と、旋回部13に基端部が回転可能に支持され、前後方向に揺動する下部アーム15と、下部アーム15の長手方向に沿って、下部アーム15の側面に並んでそれぞれ配線された第1及び第2の線条体31、32を下部アーム15の長手方向に移動可能に支持する案内部41、案内部41の下部アーム15の長手方向の両側にそれぞれ設けられ、第1及び第2の線条体31、32が移動することより生じる第1及び第2の線条体31、32のロボット10の幅方向の変形を抑制する2つの押さえ部材42a、42b及び下部アーム15の基端部側の側面及び先端部側の側面をそれぞれ覆い、第1及び第2の線条体31、32を保護する2つの保護部材44a、44bを有する線条体支持機構20とを備える。
(もっと読む)
ワーク姿勢検出装置、ワーク処理実行装置及びワーク姿勢検出方法
【課題】高精度なワークの位置決めを必要とせず、大まかに位置決めされたワークの位置・姿勢を精度良く検出することが可能なワーク姿勢検出装置、ワーク処理実行装置及びワーク姿勢検出方法を提供すること。
【解決手段】第1のビジョンカメラ7が作業姿勢のキャブ2の第1基準孔17を二次元検出位置から撮像し、撮像された画像を解析して第1基準孔17の位置を求めることによって、基準位置に対する作業姿勢のキャブ2の概略変位が暫定的に演算される。概略変位が演算されたとき、塗装ガン4c及びシーリングガン5c,6cが制御されて、第1の補正位置及び第2の補正位置に塗装ガン4c及びシーリングガン5c,6cが設定され、第1のビジョンカメラ7の第1の画角よりも狭い第2〜第4の画角に設定された第2〜第4のビジョンカメラ8,9,10が、作業姿勢のキャブ2の第1〜第3基準孔17,18,19を撮像する。
(もっと読む)
ロボット制御装置およびロボット制御方法
【課題】角度センサに異常が生じた場合において、サーボモータと減速機との接続部分への負担を抑制しつつ、ダイナミックブレーキと機械ブレーキとを用いて速やかにサーボモータを停止させる。
【解決手段】ロボット制御装置200は、角度センサ160の異常が検出された場合において、推定された回転速度においてダイナミックブレーキを作動させたと仮定した場合に該ダイナミックブレーキによって生じる制動トルクと、機械ブレーキ150を作動させたと仮定した場合に該機械ブレーキ150によって生じる制動トルクとのトルク合計値が、所定のトルク上限値を超える場合に、機械ブレーキを作動させずにダイナミックブレーキを作動させる第1の制動処理を実行し、トルク合計値が前記トルク上限値以下の場合には、ダイナミックブレーキおよび機械ブレーキを作動させる第2の制動処理を実行する。
(もっと読む)
ロボットおよび2台以上のロボットの組み立て方法
【課題】個体差を小さくすることが可能なロボットを提供する。
【解決手段】このロボット100は、アーム支持部2と、アーム支持部2に関節部を介して連結される下腕部3と、関節部に配置され、下腕部3をアーム支持部2に対して回動可能に連結し、偏心ギア77a(77b)が噛み合い位置を移動させながら回転する減速機7bと、アーム支持部2に対する下腕部3の相対的な回転位置が所定の位置にあるとき、減速機7bの回転角度位置が所定の回転角度位置となるように位置合わせ可能な位置決め部21b、71d、72eおよび3bとを備える。
(もっと読む)
ワーク搬送装置およびワーク搬送方法
【課題】台車の側壁に隣接するワークが傾いている場合でも、そのワークを把持部で確実に把持することができるワーク搬送装置およびワーク搬送方法を提供する。
【解決手段】ワーク用ハンド部220の把持部221の中心部が、回動部112の回転軸Oから第1アーム部211の他端部に向けて延在する中心軸線Pから所定間隔Lをおいて配置されている。把持部221の中心線Rと第1アーム部211の中心軸線Pとの間隔Lを適宜設定することにより、第1アーム部211および第2アーム部212と台車Dの側壁D1との間の間隔を大きく設定することができる。図4に示すように、台車Dの側壁D1に隣接するワークWの姿勢が傾いている場合、第1アーム部211および第2アーム部212を台車Dの側壁D1に対して傾斜させても、第1アーム部211および第2アーム部212は台車Dの側壁D1と干渉しない。
(もっと読む)
ロボット制御パラメータ決定装置及び方法、ロボットの制御装置、ロボット装置、ロボット制御パラメータ決定プログラム、ロボット制御パラメータ決定用集積電子回路
【課題】人とロボットの操作部との接触領域の特徴量に応じてロボットの制御パラメータ値を変える。これにより、早く動かしやすいロボットの制御と、ゆっくり(又は正確に)動かしやすいロボットの制御とを操作部の握り方の変更により切り替え可能にする。
【解決手段】ロボットの操作部と人との接触領域の特徴量を取得する特徴量取得部と、ロボットの制御パラメータの値を、特徴量取得部が取得した特徴量に基づき決定する制御パラメータ決定部とを有し、制御パラメータ決定部は、特徴量に応じて、異なる移動範囲で操作感が良くなる制御パラメータの値を決定する。
(もっと読む)
ロボットの評価制御方法及びロボットの制御装置
【課題】ロボットが設置された現場でティーチングを行う際に、ユーザがロボットと設備との衝突を回避できるよう支援する評価制御方法を提供する。
【解決手段】ロボット本体が動作する動作領域空間を、立方体状の単位空間であるキューブの集合として捉え、各キューブの外面を規定する3次元座標値を決定すると、キューブよりもサイズが大きな空間によって、ロボット本体の手先部分を覆うボックス領域を設定する。ロボット本体の動作を開始させる前に各キューブの評価を全て「危険」に設定しておき、ロボット本体が動作することでボックス領域の内部に全体が含まれたキューブについては(S5:YES)評価を「安全」に変更する(S6)。
(もっと読む)
41 - 60 / 620
[ Back to top ]