
Fターム[3C007BS10]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | 腕直列配列 (1,746) | 関節型 (1,487) | 垂直多関節型 (937)
Fターム[3C007BS10]の下位に属するFターム
Fターム[3C007BS10]に分類される特許
101 - 120 / 620
関節駆動装置及び多軸マニピュレータ
【課題】関節駆動装置の数を関節の数と等しくすることができ、駆動力伝達用の線状部材の経路長の変化を各関節部で解消することができるとともに、駆動力伝達用の線状部材の交換を短時間で容易に行うことができ、利便性を高めることができるようにする。
【解決手段】所定のリンク部材と次のリンク部材とを回転可能に接続する関節軸上に配設された関節部の駆動用の線状部材から駆動力を受けて回転することによって所定のリンク部材に対して次のリンク部材を回転させる被駆動部材と、関節軸上に配設された経路長補償ユニットであって、所定のリンク部材に対応して配設された他の関節部の駆動用の線状部材からの駆動力を、次のリンク部材に対応して配設された他の関節部の駆動用の線状部材に伝達するとともに、他の関節部の駆動用の線状部材の経路長の変化を吸収する経路長補償ユニットとを有する。
(もっと読む)
ロボットアーム位置補正パラメータの同定装置及び方法、並びにそれを用いたロボットコントローラ及びロボット制御方法

【課題】ロボット個体毎に適用可能な、自動処理による簡便なロボット位置補正パラメータ同定方法及び装置を提供する。
【解決手段】本発明は、各関節部のモータと、モータに連結された減速機と、減速機に連結されるロボットアームとを備えるロボットにおいて、手先位置の軌跡誤差を補正するために、各モータへの角度指令に加算される補正値のパラメータを同定する装置であり、該モータへのトルク指令が最大となるリンク角度において最大値をとるトルク指令と同一周期の正弦波の位相に基づいて補正値の位相パラメータを同定し、且つ、同定された位相パラメータ及び任意の振幅パラメータを用いて計算される補正値と角度指令との合計に対する順運動学計算から得られるロボットの手先位置と現在の手先位置との差分につき動作時間内での積分値を計算し、該積分値が最小となる振幅パラメータを補正値の振幅パラメータとして同定する手段を備える。
(もっと読む)
加工ロボットとその加工制御方法
【課題】 工具をワークに押付けながら加工する場合において、工具の切れ味が変化してもワークの加工寸法への影響が小さく、かつ工具の交換頻度を下げることができる加工ロボットとその加工制御方法を提供する。
【解決手段】 外力を計測する力センサ15と、工具12と、工具を3次元空間内で移動可能なロボットアーム16と、加工データを記憶しロボットアームを制御するロボット制御装置20とを備える。ワークの加工開始時(B)に、工具12の送りを停止して、所定の押付け力及び工具の動作速度で工具12をワーク1に押付け、工具12がワーク1に所定の深さまで切り込むまでの加工速度を計測する。次いで、ワークの加工時(C)に、前記加工速度から工具の送り速度、押付け力、又は工具の動作速度を補正してワーク1を加工する。また、工具が劣化し、加工速度が予め設定した限界加工速度に達したら、加工後に工具を交換する。
(もっと読む)
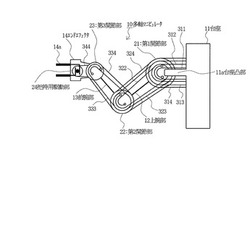
遠隔操作装置
【課題】操作者が、マニピュレータの出力動作を容易に連想及び体感しながら入力動作を行うことができる遠隔操作装置を提供すること。
【解決手段】重力方向に対する姿勢及び回動動作が入力される第一入力部10と、第一入力部10に対して回転可能に接続されて、重力方向に対する姿勢及び第一入力部10に対する回転動作が入力される第二入力部11と、第一入力部10又は第二入力部11に対して移動可能に接続されて、第一入力部10又は第二入力部11に対する移動動作が入力される第三入力部12と、入力動作を第一入力部10又は第二入力部11の何れか一方に規制する入力切換スイッチ(入力切換部)13と、加速度センサ(加速度検出部)15と、入力動作を腕部に対する手先部の回動方向及び回動角度に変換し、入力動作を手先部の移動方向及び移動距離に変換し、並びに、入力動作を把持部の開閉量に変換する制御部17と、を備えている。
(もっと読む)
ロボットの回転関節用配線装置
【課題】ロボットの回転関節用配線装置に組み込むフレキシブルプリント配線板を製造する際に、材料ロスを極力小さくする。
【解決手段】長尺な帯状、且つ、一端部から他端部まで幅寸法が一定の形状の折曲前フレキシブルプリント配線板に対して、その一端部近くから他端部まで前記折曲前フレキシブルプリント配線板を幅方向に2つ以上に均等に分割する1本以上の切れ目を入れることにより形成された、一端部が繋がった複数の短冊状のフレキシブルプリント配線板14−1、14−2、14−1を備え、前記複数の短冊状のフレキシブルプリント配線板14−1、14−2、14−1を、その繋がっている部分に近い部分で折り曲げることにより、前記複数の短冊状のフレキシブルプリント配線板14−1、14−2、14−1が互いに重なるように構成した。
(もっと読む)
ロボットの制御装置及びロボットの位置修正制御方法
【課題】ロボット本体の手先の教示点の修正が、アーム全体について意図しない動作を生じさせることを回避できるロボットの制御装置を提供する。
【解決手段】制御装置は、ティーチチェックモードの実行停止時点に実行中であった制御プログラム中の命令を判定し、当該命令が動作命令MOVEであれば当該動作命令を、動作命令MOVEでなければ直近に実行された動作命令MOVEを対象として、その時点の手先位置が動作命令MOVEの目標位置に一致しているか否かを判定する(S8,S9)。手先位置と目標位置とが一致していない場合は(S9:NO)、以降に行われるユーザの修正操作に応じた手先位置の修正制御を行い(S16)、手先位置と目標位置とが一致している場合は(S9:YES)、以降に行われる手先位置の修正制御に制限を付与する制限付き修正制御を行う(S10〜S12)。
(もっと読む)
情報処理装置および情報処理装置の制御方法
【課題】 操作者の負担を軽減させつつ、複雑なロボットシステムの構成部材を適切に配置すること
【解決手段】 撮像手段を有し、当該撮像手段の撮像画像に基づき作業を行うロボットシステムの構成部材の配置を設定するための情報処理装置であって、
前記ロボットシステムの作業空間に対応する仮想空間に、前記構成部材に対応する仮想物体を配置する配置手段と、前記撮像画像に対応する、前記仮想物体が配置された前記仮想空間の仮想空間画像を取得する第一の取得手段と、前記仮想空間画像に基づき、前記ロボットシステムの作業に対する前記仮想物体の配置の適合を示す評価値を取得する第二の取得手段とを有することを特徴とする。
(もっと読む)
塗装ロボット用保護カバー
【課題】 塗料ミストなどの吸着性に優れ、かつ塗装ロボット動作時に破れることがない塗装ロボット用保護カバーを提供する。
【解決手段】 塗装ロボット用保護カバーは、合成樹脂からなるフィラメント糸をニット編みしてなる伸縮可能な編物地に、半固体状組成物を含浸させて付着させてなる。半固体状組成物は、ペトロラタム、又はペトロラタムとポリエチレングリコールとの混合物からなるとよい。保護カバー1は、例えば、塗装ロボット2のアーム部21や、塗装ガン22などを被覆する。
(もっと読む)
教示点補正装置及び教示点補正方法
【課題】対象ワークの設置誤差に加えて形状誤差をも考慮した上で、作業ロボットの教示点を補正することのできる教示点補正装置及び教示点補正方法を提供する。
【解決手段】作業ロボット1に予め設定された基準教示点を、作業対象となる対象ワーク30bの状況に応じて補正する教示点補正装置である。教示点補正装置は、基準ワーク30a及び対象ワーク30bに設定された特徴点の位置と、基準ワーク30a及び対象ワーク30bの断面形状との計測が可能な2次元変位センサ3と、基準ワーク30aの特徴点の位置と対象ワーク30bの特徴点の位置とを比較することによって対象ワーク30bの設置誤差を演算すると共に、基準ワーク30aの断面形状と対象ワーク30bの断面形状とを比較することによって対象ワーク30bの形状誤差を演算する演算部5と、設置誤差及び形状誤差に基づいて基準教示点を補正する補正部6と、を備えている。
(もっと読む)
フレキシブルガイド及びフレキシブルガイドを有する産業用ロボットのケーブル支持装置
【課題】周辺機器との干渉が少なく、ケーブルやホースの伸び曲げ挙動を考慮する必要のない一定形状を維持可能な構造が簡単で取扱易いフレキシブルガイド及びそれを用いた産業用ロボットのケーブル支持装置を提供。
【解決手段】筒状のフレキシブル部材20と、フレキシブル部材の両端に設けられた固定部7、8と、フレキシブル部材の長手方向に沿って軸対称に形成された一組の挿通穴12a、12bと、それぞれの挿通穴に挿通された固定部間の長さL1、L2が異なる二本の線材13、14とを有するフレキシブルガイド9とする。線材の長さは調整可能とする。産業用ロボットの第一のアーム1と、アーム支持軸1aに対して回転自在に支持された第二のアーム2に、フレキシブルガイドの両固定部の開口穴7a、8aがアーム支持軸回りに同方向側に向くように、かつ、線材の長さが短い側の側面部7d、8dをアーム支持軸線側となるように各アームに固定する。
(もっと読む)
ロボット装置及びロボット装置の制御方法
【課題】教示動作のための専用のキャリブレーションツールが不要であり、また、マニピュレータの手先にキャリブレーションツールを取り付けることが不要であって、教示動作のたびに微小な位置及び姿勢のずれが生ずることがなく、かつ、迅速な教示動作が可能となされたロボット装置及びロボット装置の制御方法を提供する。
【解決手段】マニピュレータ1と、このマニピュレータ1の動作を制御する制御手段とを備え、制御手段は、閉じたときに錘形状となる把持ツメを手先に有するマニピュレータ1の手先を作業台上に設けられた位置基準部7に当接させることによって、位置合わせのための教示動作を行う。
(もっと読む)
軌道計画方法、軌道計画システム及びロボット
【課題】計算コストを抑えながら状態空間の探索に制約が生じることのない軌道計画方法及び軌道計画システムを提供する。
【解決手段】物体の状態を状態空間において探索木の根として定め、所定の時間間隔における力学的な関係から時間経過した後の該物体の次の状態を状態空間において探索木の枝として定める探索木作成部101を備える。さらに既知状態登録木を記憶する既知状態登録木記憶部105と、予め区分された状態空間の複数のセルから次の状態が属するセルを定め、該セルに属する状態が既知状態登録木の枝としてすでに登録されているかどうか判断し、登録されている場合に次の状態を破棄し、そうでない場合に次の状態を該既知状態登録木の枝として登録する既知状態登録木作成部103と、を備える。既知状態登録木の枝として登録された状態の中から目標状態までの距離がもっとも小さい状態を選択し、その状態から軌道を求める軌道作成部107を備える。
(もっと読む)
多関節形ロボット
【課題】
旋回台上に設けられた第1アーム、第2アームに配置されるケーブル類とロボットの周辺に位置する傷害物との干渉をなくすことができる多関節形ロボットを提供する。
【解決手段】
溶接ロボットは、第1アーム40の支持部材47、及び軸受部材48に第3回転軸心J3を含みかつ該第3回転軸心J3と同方向に延びる貫通孔47aを有する。パワーケーブルPC2,及び制御信号ケーブルC2は、第1アーム40内部、貫通孔47a、及び第2アーム50内部を通過させて配置されている。
(もっと読む)
作業補助システム及び作業補助方法並びに該作業補助方法を記録した記録媒体
【課題】工場内の生産ラインにおいて、ロボットと一人の作業者が協調して作業を行うシステムを提供する。
【解決手段】作業者の手に装着され、当該手による作業動作を経時的に測定してその測定結果である動作情報を3次元座標データとして送信するモーションキャプチャ2と、作業者の手に装着され、部品に加わる荷重を経時的に測定してその測定結果である圧力検出データを送信する圧力センサ23と、前記3次元座標データ、及び前記圧力検出データに基づき産業用ロボット4を制御する制御部31とを備える。制御部は、モーションキャプチャから得られた3次元座標データにロボットを追従させ、作業者の手が標準作業位置に到達したと判定すると、作業者が手で部品を押圧することで圧力センサから送信される圧力検出データの値に応じた圧力値で、ロボットの保持部で部品を押圧させる保持部押圧機能31bとを有する。
(もっと読む)
試験装置、試験システム及び試験方法
【課題】実際の動作状況に近い環境で人手を介さずに試験を行う。
【解決手段】試験装置1の記憶手段1aには、予め、対象装置3の操作部3aが生成する操作データと、機械部3bの動作終了を待つ一時停止指令と、を記録した操作情報が記憶される。試験装置1では、操作情報を時系列に読み出し、操作データを読み出したときは操作データ出力手段1cが、操作データを対象装置3に出力する。一時停止指令を読み出したときは、同期手段1dが、ロボット2から動作終了の通知を受けるまで、操作データ出力手段1cによる操作データの出力を停止させる。
(もっと読む)
ポジショナを備えたロボットシステム
【課題】本発明では、ロボットとポジショナを用いてフットプリントを小さくするロボットシステムを提供する。
【解決手段】作業対象物10と、前記作業対象物10に対して作業するロボット5、6と、前記作業対象物10を位置決めするポジショナ7、8とを備え、前記ポジショナ7、8の枠体24上に前記ロボット5、6を備えたものである。
(もっと読む)
振動抑制方法
【課題】加速または減速運動に伴って運動体に生じる、少なくとも1自由度かつ時変の振動を抑制する振動抑制方法を提供する。
【解決手段】加速または減速運動に伴って運動体に生じる、少なくとも1自由度かつ時変の振動を、インプットシェイピング法を用いて抑制する場合に、運動体の姿勢変化に伴って生じるコリオリの力がする仕事を考慮して、第2のインパルス入力の大きさを決定しているため、時間によって第1のインパルス応答の振幅が変化する時変の振動系に対して、第2のインパルス応答を重ね合わせることで効果的に振動を抑制することができる。
(もっと読む)
加工システム及び加工方法
【課題】自動車の生産工程のうちルーフ工程の省スペース化や作業の効率化を図ること。
【解決手段】ハンドジグ付ロボット11は、ワーク21をパネルストック12から取り出す。ハンドジグ付ロボット11は、ワーク21を固定シーリングガン13に対して相対的に移動させる。これにより、固定シーリングガン13から噴出されるシーラが、ワーク21に塗布される。ハンドジグ付ロボット11は、ワーク21をシーラ用位置決め治具14に固定する。ハンドジグ付ロボット11は、ワーク21を溶接用位置決め治具15に固定させ、ワーク21に対してスポット溶接を行う。ハンドジグ付ロボット11は、ワーク21を払出し場所(図示せず)に払い出す。
(もっと読む)
水室内作業装置および水室内作業方法
【課題】蒸気発生器における水室内作業の作業性を向上できる水室内作業装置および水室内作業方法を提供すること。
【解決手段】この水室内作業装置1は、管板面137aにある伝熱管132を保持して管板面137aに固定されるベース2と、このベース2に連結されると共に水室130内に吊り下げられて配置されるマニピュレータ4とを備える。そして、ベース2が、マニピュレータ4に連結されるベース本体21と、このベース本体21に対して進退変位できるウイング22a、22bと、このウイング22に配置されると共に伝熱管132に挿入されて伝熱管132をクランプ保持するクランパ23a、23bとを有する。
(もっと読む)
トレイ移載装置及び方法
【課題】簡単な構造で、トレイの有無やトレイ高さを検出することができるトレイ移載装置及び方法を提供する。
【解決手段】複数の積載スペースa,b,cにそれぞれ段積み可能な複数のトレイ10と、トレイに設けられたトレイ把持部11とトレイ上に積載されたワーク1を把持可能なハンド12と、ハンドに取り付けられトレイをその上方から撮影するカメラ14と、ハンドを3次元的に移動可能なロボット16と、カメラで撮影した画像を画像処理してロボットを制御するロボット制御装置20とを備える。各積載スペースの上方から撮影した画像5に基づき、最上段のトレイ把持部11の位置及び姿勢と、各積載スペースのトレイ10の段積み数とを計測し、これに基づき最上段のトレイ10の移載及び最上段のトレイ上のワーク1の移載を行う。
(もっと読む)
101 - 120 / 620
[ Back to top ]