
Fターム[3C007BS10]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | 腕直列配列 (1,746) | 関節型 (1,487) | 垂直多関節型 (937)
Fターム[3C007BS10]の下位に属するFターム
Fターム[3C007BS10]に分類される特許
21 - 40 / 620
産業用ロボット
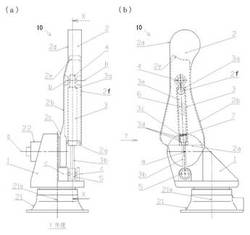
【課題】 アームを駆動するモータ、減速機の負荷を軽減するためのバランサ装置のストロークが長くアーム強度を確保しながら、フレームとの干渉を避け、アーム回動範囲を大きくできるコンパクトな産業用ロボット10を提供
【解決手段】アーム2をフレーム1の水平回動軸aに片持ち状態で回動自在に支持される基部2cと基部側に開口部2aを有し基部側からアーム先端に向かって形成される筒状ケース部2bとアーム先端部2dとで構成する。バランサ装置3はロッド3bと、ロッドが出入りするシリンダ3aを備え、ロッド先端係合部4をフレームの一対の第一の支点c部間、シリンダの後端5を筒状ケース部内の一対の第二の支点部b間で回動自在に支持し、アームの水平回動軸の両側を含む回動範囲で筒状ケースとバランサ装置とが干渉しないようにする。バランサ装置をロッドの引き込み又は引き出しに従って反力が大きくなる方向に圧縮性流体6を封入する。
(もっと読む)
コアレスモーター、コアレスモーターを搭載したロボットハンド、およびロボット

【課題】巻線効率が高く、且つ、高トルクなコアレスモーターを提供する。
【解決手段】中空の空芯巻線の内側に、円筒形状の永久磁石を設けてコアレスモーターを
構成する。また空芯巻線は、電線を菱形形状に巻回することによって形成する。そして、
菱形形状の一方の対角線は永久磁石の中心軸と平行とし、他方の対角線は、永久磁石の中
心軸に対して、永久磁石の磁極が切り換わる角度の1.2倍から1.6倍の角度範囲とな
る長さに設定する。こうすれば、菱形形状に巻回して空芯巻線を構成するコアレスモータ
ーの回転トルクを向上させることができる。また、電線が菱形形状に巻回されているので
、高い巻線効率を実現することが可能となる。
(もっと読む)
車体のドア開け方法及び装置
【課題】ロボットの設置箇所を小さくすると共に、サイクルタイムの短縮を図ることが可能な、ドア開け方法及び装置を提供すること。
【解決手段】双腕ロボットにおいては、2つのアームがS1軸及びS2軸の各々によって回動される。その結果、S1軸を用いた回動により、ドア開き動作(ステップST2)が実現される。そして、S1軸とS2軸とを用いた回動により、ボルト緩め動作を行うための、ドア91のインナ側に入り込む移動(ステップST3)が実現される。この場合の移動は、ドア91の方向を向くような移動である。その結果、ドア把持位置まで移動したとき(ステップS26)、双腕ロボットは、ボルト緩め動作を行い易い姿勢となっている。
(もっと読む)
清掃ロボットシステム及びその制御方法
【課題】
アレンジロボットが、清掃ロボット及びパネル部材の位置等の環境情報を確実に取得し、自律運転することができる清掃ロボットシステム及びその制御方法を提供する。
【解決手段】
ハンド部10に少なくとも清掃ロボット3とパネル部材5の位置及び形状を計測するセンサ12、13を設置した清掃ロボットシステム1の制御方法であって、アレンジロボット2が移動する際に、マニピュレータ4を作動させ、複数の位置でセンサ12、13が計測を行うステップと、センサ12、13が取得した情報を元に、アレンジロボット2の移動を自動制御するステップと、アレンジロボット2が清掃ロボット3を把持する際に、マニピュレータ4を作動させ、複数の位置でセンサ12、13が計測を行うステップと、センサ12、13が取得した情報を元に、マニピュレータ4が清掃ロボット3を把持する作業を自動制御するステップを有する。
(もっと読む)
ロボットシステム及びロボットの異常検出方法
【課題】ロボットアームの異常の有無を検出可能とすることにより、ロボットの信頼性を向上する。
【解決手段】ロボットシステム1は、アーム103L,103Rを有するロボット100と、ロボットコントローラ150とを備えており、ロボット100は、アーム103L,103Rに設けられたセンサ122を有し、ロボットコントローラ150は、アーム103L,103Rが異常のない状態で所定の動作を行う間のセンサ122の出力値Vの時間履歴を規範データとして記録する規範データ記録部163と、稼働時においてアーム103L,103Rが所定の動作を行う間のセンサ122の出力値Vの時間履歴を出力データとして記録する出力データ記録部167と、規範データ記録部163に記録された規範データと出力データ記録部167に記録された出力データとを比較することにより、アーム103L,103Rの異常の有無を判定する比較判定部164とを有する。
(もっと読む)
ドア把持装置及び方法
【課題】小型化されたツールを用いる双腕ロボット単体のみで、ドアを傷つけないように把持することが可能な、ドア把持装置及び方法を提供すること。
【解決手段】双腕ロボット11は、ドア91等の重力方向の力を受ける荷重受けとしてのドアH受け部材(その構成要素であるウレタンパッド42)と、ドアを把持する第1把持治具23R1と、を備えている。第1把持治具23R1は、2点PA,PBの相対距離が可変な、ドア91の開口部120等に当接する2つのドア把持パッド53,54を有している。一方のドア把持パッド53は、ドアの荷重方向の力を受ける方向に開口部の点PAに当接し、他方のドア把持パッド54は、荷重受け(ウレタンパッド42)とドア把持パッド53とにより発生するモーメントを受ける方向に開口部の点PBに当接する。
(もっと読む)
作業の良否判定システム及び良否判定方法
【課題】ロボット1等の機械装置においてワークの保持部近傍の大型化やケーブル数の増加を抑制するとともに、センサ等の故障を防止する。
【解決手段】ロボット1等の機械装置におけるワークの保持部(例えばチャック8)と、その支持部(例えば手首部6)との間に可動部(例えばコンプライアンス装置7)を設け、作業に伴う保持部及び支持部の位置の変化からその良否を判定する。例えば、可動部の保持部側及び支持部側の部材に夫々マーカーMを設けて、カメラ11により撮影した画像中のマーカー位置を画像処理により検出し、保持部及び支持部の間隔の変化から作業の良否を判定する。
(もっと読む)
ロボットの外部軸の計測方法、ロボットの教示データ作成方法、およびロボットのコントローラ
【課題】ポジショナ回転軸のロボットに対する相対的な位置姿勢を高精度に計測する。
【解決手段】
ロボット10に作業されるワークWを把持するポジショナ12の回転軸Arまたは直動軸の該ロボット10に対する相対的な位置姿勢を計測するロボット10の外部軸の計測方法であって、ポジショナ12の回転軸Arまたは直動軸に対する所定の位置に定義された計測点Pmにロボット10の基準点Ptが手動によって位置合わせされた状態の該ロボット10の姿勢を、基準点Ptが計測点Pmに位置合わせされた状態を維持しつつ計測姿勢に変更する。計測姿勢として、(1)関節10a〜10fそれぞれにおける、ポジショナ12が把持するワークWに対して作業を実行するときの作業姿勢時の関節値と計測姿勢時の関節値との間の差分値と、(2)関節10a〜10fそれぞれに対して予め定義されている重み値とに基づいて、作業姿勢に対する類似の程度が高い姿勢を決定する。
(もっと読む)
3軸力センサを用いて力制御をおこなうロボットの制御装置
【課題】3軸力センサによっては検出できない力およびモーメントを推定する。
【解決手段】ツール(4)およびワーク(W)の一方に対して他方をロボット(1)の手先部によって相対的に移動させ、ツールとワークとの間に作用する力を制御するロボット制御装置(11)は、1軸方向の力と、該1軸に直交で且つ互いに直交する2軸方向の軸回りのモーメントとを検出する力検出部(3)と、ツール(4)とワーク(W)との間に作用する力を推定するための力推定用点を設定する力推定用点設定部(12)と、力検出部により検出した1軸方向の力および2軸方向の軸回りのモーメントと、力推定用点設定部により設定された力推定用点の位置とに基づいて、前記2軸方向の力またはさらに前記1軸回りのモーメントととを推定する力推定部(13)と、を備える。
(もっと読む)
レーザ加工ロボットの教示方法及び教示装置
【課題】レーザ加工ロボットの教示作業を容易且つ正確に行えるようにする。
【解決手段】測定レーザと加工レーザとを出力するレーザスキャナを有し、加工レーザをワークに照射してレーザ加工を行うレーザ加工ロボットの教示方法が、ワーク上の基準照射位置を基準として予め定められた基準図形に基づき測定レーザをワーク上に照射する際に、測定レーザの照射位置を制御する制御手順S4と、レーザスキャナから照射された測定レーザが、ワークにおいて反射された反射光を測定する測定手順S5と、反射光と基準図形を比較し、基準照射位置におけるワークの表面の傾斜を算出する傾斜算出手順S6と、傾斜算出部が算出した傾斜から前記ロボットの姿勢に関する教示データを作成するデータ作成手順S7と、を有する。
(もっと読む)
ロボットの制御装置及びロボットの姿勢補間方法
【課題】ロボットの手先がワークを把持して加工を行う場合の作業精度を向上させる。
【解決手段】制御装置は、手先の先端点を座標原点とするX方向,Y方向,Z方向の各軸について、手先の位置及び姿勢をティーチングする場合に、座標原点から各軸方向の所定距離に手先の姿勢を定める姿勢点を設定すると、ティーチングした姿勢に対応する姿勢点の間について、各軸の姿勢点の移動軌跡がそれぞれ滑らかに繋がるように補間する。
(もっと読む)
ロボットアーム及びロボットアームの制御方法
【課題】ロボットアームの軌道に障害物がある場合でも、迅速に障害物を退避し、タスクを効率よく実行する。
【解決手段】ハンド部5と、複数の関節11,12,13と、ハンド部5及び関節11,12,13とを連結する複数の連結部14,15,16,17とを有するロボットアーム1であって、ハンド部5が物体を把持して移動する工程と、関節13に備えられたひじあて部6が障害物を押圧する工程と、を有する。
(もっと読む)
ロボット制御設定支援装置
【課題】対象ワークのCADモデルや作業内容雛形が不要で、ロボット動作の制約事項を考慮してロボット動作教示とその際の画像処理を支援する装置を提供する。
【解決手段】教示作業者との対話的な処理を行い、2次元画像・3次元データ処理部が表示した対象ワークに係る2次元画像と3次元データに対し入力に従い対象ワーク位置姿勢に対するロボット目標位置姿勢を決める画像処理を行い、制約条件算出・評価処理部が画像処理結果のロボット目標位置姿勢に従い操作されたロボットの動作の制約条件の算出評価を行い承諾入力がなければあるまで新たな入力に従い目標位置姿勢を決定する画像処理を行わせ新たな目標位置姿勢に従いロボット動作の制約条件算出評価を行い、ロボット動作モニタ部が承諾条件でのロボット動作手順を記録し、処理手順解析・再構成処理部が記録された一連の処理内容を表示し入力に従い冗長処理の統合、削除を行い再記録する。
(もっと読む)
塗装ロボット及び塗装システム
【課題】塗装ブースを小型化することが可能な塗装ロボット及び塗装システムを提供する。また、ケーブルを覆うケーブル保護部材を省略することが可能な塗装ロボット及び塗装システムを提供する。
【解決手段】 塗装ロボット50は、塗装ブース20の側壁22に固定される固定部62と、固定部62に対して旋回可能に設けられる旋回部64と、旋回部64に設けられるアーム66と、アーム66の先端部に設けられる塗装ガン68と、を備え、側壁22に固定される固定部62の固定面120に、ケーブル92a、92bを引き込むケーブル引込部112a、112bが設けられる。
(もっと読む)
荷搬送アームおよび荷搬送アームを備えた荷搬送ロボット
【目的】複雑な制御を必要とせず荷物を傷つけずに保持できる荷搬送アームおよび荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体には、左右一対のアームを設け、アームの前腕21には、荷を当接支持する手先部30を軸35に回転可能に設けた。手先部30は、荷に当接する当接面30Aを有し、当接面30Aを前腕21の長手方向に垂直に付勢するねじりコイルバネ36の一端を固定し、ねじりコイルバネ36の他端は前腕21に固定されている。荷搬送ロボットは、荷の表面に当接面30Aを当接させるように前腕21を可動させ、荷の表面の向きに合わせて手先部30を軸35を中心に回転させる。当接面30A全体を荷の表面に当接させた状態で、前腕21を可動させ、手先部30を介して軸35にて荷の荷重を受けて、荷を移動させる。
(もっと読む)
サスペンションアッセンブリ取り付け方法
【課題】サスペンションアッセンブリを車両ボディに接近させていく過程でダンパーが車両ボディ側と干渉する場合でも、外部センシング機器を用いずに、その干渉を回避してサスペンションアッセンブリを車両に取り付けることのできるサスペンションアッセンブリ取り付け方法を提供すること。
【解決手段】サス整列・搭載ロボット4の上昇と同期させて、下廻り締付・ダンパー挿入ロボット5によりダンパーの位置を必要に応じて変更することで、ボディに対するダンパーの干渉を回避する。所定の高さに到達したとき、ダンパー取付孔13L,13Rの位置に関連して動作するエンジンルーム内締付ロボット6のエンドエフェクタ61の位置を測定し、測定した位置からダンパー取付孔の位置を算出し、算出した位置を下廻り締付・ダンパー挿入ロボットに伝送し、伝送された位置に応じてダンパーをダンパー取付孔に位置合わせする。
(もっと読む)
溶接状況監視方法及び溶接状況監視装置
【課題】撮像手段の設置位置が不明な状況下でも、溶接状況を監視できるようにする。
【解決手段】本発明では、少なくとも撮像手段16の設置位置が不明な状況下で溶接ロボット1の先端部12aを撮像し、当該先端部12aが写り込んだ画像を取得する。画像上における先端部12aの位置である撮像先端部位置fPと、溶接ロボット1の先端部12aの位置である実先端部位置rPとを取得する。撮像先端部位置fPと実先端部位置rPとの関係を示す変換パラメータ(xc,yc,zc,αc,βc,γc)を求める。求めた変換パラメータ(xc,yc,zc,αc,βc,γc)を用いて、実先端部位置rPとカメラ座標で表現されたロボット先端部位置cPとを関係づける変換マトリックスcrTを求め、この変換マトリックスcrTを用いて、光軸がロボット先端を向くように撮像手段16を動かして溶接状況を監視する。
(もっと読む)
パネルの搬送装置
【課題】ロボットに保持されたパネルを仮置きすることなく位置検出し直接所定位置に配置するパネルの搬送装置を提供する。
【解決手段】搬送経路に沿って順次送られてくる収容ケース11に、別位置に配置されていたパネル12を載置するパネルの搬送装置10であって、パネル12を吸着保持する吸着パッド13が設けられたロボット14と、吸着パッド13に吸着保持されているパネル12を撮像する第1の撮像手段15と、搬送経路上の停止位置で静止した収容ケース11を撮像する第2の撮像手段16と、第1の撮像手段15によって撮像された画像からパネル基準位置に対するパネル12の位置ずれ量を検出すると共に、第2の撮像手段16によって撮像された画像からケース基準位置に対する収容ケース11の位置ずれ量を検出し、収容ケース11の特定位置にパネル12を載置する吸着パッド13の移動先の座標及び向きを算出する制御手段17とを有している。
(もっと読む)
アーク溶接ロボット制御装置
【課題】
アーク溶接ロボットにおいてトーチ姿勢の教示が煩雑である。
【解決手段】
ロボット制御装置RCは、トーチTの姿勢を規定するトーチ姿勢ファイルを作成するCPUと記憶部を備える。トーチ姿勢ファイルは、溶接線上の教示点または溶接開始命令の1パラメータとして設定される。ロボット制御装置RCは、作業プログラムを再生する際、トーチ姿勢ファイルが設定された教示点、またはトーチ姿勢ファイルが設定された溶接開始命令が有効となる教示点におけるトーチ姿勢を算出する。角度パラメータを、作業プログラムとは別のファイルとすることで、一度教示したトーチ姿勢の再利用を可能とすると共に修正も容易となる。
(もっと読む)
長尺材曲げ加工用のロボットハンドおよび長尺材曲げ加工システム
【課題】吸着手段とグリッパとを備えたローディングが可能な長尺材用ロボットハンドの提供と、このロボットハンドを使用した長尺板材曲げ加工システムの提供。
【解決手段】1.ロボットハンド15に吸着手段31とワークの長手方向両端部を把持するグリッパ51とを設け、前記吸着手段をワークの前後方向に移動位置決め可能に設けたことを特徴とする長尺板材曲げ加工用ロボットハンド。2.板材折曲げ加工機へワークを供給するロボットと、掴み換え装置とを備えた長尺板材曲げ加工システムにおいて、前記ロボットハンドがロボットハンド15に吸着手段31とワークの長手方向両端部を把持するグリッパ51とを設け、吸着手段をワークの前後方向に移動位置決め可能に設けてなるこ長尺板材曲げ加工システム。
(もっと読む)
21 - 40 / 620
[ Back to top ]