
Fターム[3C007BS10]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | 腕直列配列 (1,746) | 関節型 (1,487) | 垂直多関節型 (937)
Fターム[3C007BS10]の下位に属するFターム
Fターム[3C007BS10]に分類される特許
121 - 140 / 620
トレイ移載装置及び方法
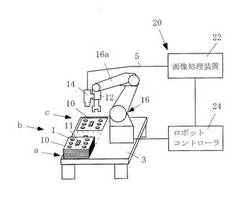
【課題】簡単な構造で、トレイの有無やトレイ高さを検出することができるトレイ移載装置及び方法を提供する。
【解決手段】複数の積載スペースa,b,cにそれぞれ段積み可能な複数のトレイ10と、トレイに設けられたトレイ把持部11とトレイ上に積載されたワーク1を把持可能なハンド12と、ハンドに取り付けられトレイをその上方から撮影するカメラ14と、ハンドを3次元的に移動可能なロボット16と、カメラで撮影した画像を画像処理してロボットを制御するロボット制御装置20とを備える。各積載スペースの上方から撮影した画像5に基づき、最上段のトレイ把持部11の位置及び姿勢と、各積載スペースのトレイ10の段積み数とを計測し、これに基づき最上段のトレイ10の移載及び最上段のトレイ上のワーク1の移載を行う。
(もっと読む)
加工システム及び加工方法

【課題】ワークの加工ラインの製造コストを減少させ、かつ、ワークを効率的に加工すること。
【解決手段】加工システム1において、連続搬送機構20は、ワーク2を連続搬送させる。加工機12は、ワーク2に対して所定の加工動作を行う。ロボット11は、加工機12が先端に取り付けられているアーム23と、アーム23が取り付けられるロボットベース22と、を有する。ロボット移動機構14は、ロボットベース22が取り付けられ、ロボット11を移動させる。ロボット制御装置16は、アーム23の移動制御と共に、ロボット移動機構14に対する移動制御を実行する。即ち、ロボット制御装置16は、ロボット移動機構14の移動制御として、連続搬送機構20によるワーク2の連続搬送とは独立して移動させる制御を実行する。
(もっと読む)
ロボットの制振方法およびロボットの制御装置
【課題】ロボットの先端の振動を抑制する。
【解決手段】複数のリンク24〜34と対応するリンクを駆動する複数のモータ36〜46とを有するロボットの動作が停止するときに発生するロボット先端の振動を抑制するロボットの制振方法であって、ロボット先端の加速度を加速度センサ52によって検出し、加速度センサが検出した加速度に基づいてロボット先端の速度を算出する。ロボット先端の速度と、加速度センサの加速度検出タイミングにおける複数のモータの回転角度と、ヤコビ行列Jの逆行列J−1とに基づいて、各リンクと対応するモータとの間のねじれ角速度を算出する。さらに、ねじれ角速度に基づいてねじれ角度を算出し、ねじれ角速度とねじれ角度とに基づいて、各リンクと対応するモータとの間に発生したねじれが解消する、各モータの制御入力に加算する補償量を算出し、補償量を加算した制御入力を各モータに出力する。
(もっと読む)
センサ位置姿勢計測方法
【課題】主センサ手段と補助センサ手段を用いて作業対象物に対する正確な計測を行う。
【解決手段】マニピュレータ2によりオンハンドカメラ3を移動し、オンハンドカメラ3より得られた画像情報を用いてグローバルカメラ6の三次元位置及び姿勢を計測するように構成し、作業対象物Wに対する作業を行うのに先立ち、オンハンドカメラ3によりグローバルカメラ6の位置及び姿勢を計測する。
(もっと読む)
ロボットシステム、その制御装置及び方法
【課題】サイクルタイムを増加させることなく、ハンドで把持した作業対象物の位置姿勢計測及び位置姿勢修正を行えるようにする。
【解決手段】アーム先端部11の位置姿勢を制御可能なアーム1と、アーム先端部11に取り付けられ、作業対象物3を把持する把持機構21を具備し、把持した作業対象物3のアーム先端部11からの相対位置姿勢を制御可能なハンド2と、把持した作業対象物3のアーム先端部11からの相対位置姿勢計測を行う位置姿勢計測装置22とを備えたロボットシステムにおいて、把持機構21で作業対象物3を把持した後、アーム先端部11が移動している最中に、作業対象物2のアーム先端部11からの相対位置姿勢の計測を行い、その位置姿勢計測の結果に基づいて、作業対象物3がアーム先端部11からの所定の相対位置姿勢をとるように、ハンド2のアーム先端部11からの相対位置姿勢の修正を行う。
(もっと読む)
作業機械の操作支援装置
【課題】アクチュエータの駆動によって直接的に作動している部位をオペレータが確実に把握できるようにすることで、誤操作を生じにくくする作業機械の操作支援装置を提供する。
【解決手段】動作させる部材に対応付けられた部材の画像143´を、実際の部材の相対位置関係に近似させて画像表示させるための画像表示部220を備え、部材のうちアクチュエータの駆動によって直接的に作動している部材を特定するとともに、特定された部材に対応する部材の画像143´を、他の部位の画像130´,141´,142´,150´と識別可能に画像表示部220に表示させるようにした。
(もっと読む)
ロボットの故障検出装置
【課題】撮影画像から簡易な画像解析によってアームの回転角を求め、これとモータの回転角から求められるアームの回転角を比較して回転位置検出が正常に行われているか否かを判断する。
【解決手段】所要のアーム4〜6に付されたマーカ19〜21をカメラにより撮影し、マーカ19〜21の撮影画像の形状、大きさ、または向きからアーム4〜6の回転角を演算し、アーム4〜6を駆動するモータの回転角から求めたアーム4〜6の回転角と比較し、その比較結果により回転位置検出が正常に行われているか否かを検出する。しかも、マーカ19〜21の撮影画像の形状、大きさ、または向きからアーム4〜6の回転角を演算するので、高度な演算をせずとも済む。
(もっと読む)
ワーク搬送装置
【課題】 少ない駆動源でワーク保持部材を3軸方向に移動させることができ、小さな駆動源で軽快な移動動作が可能なワーク搬送装置を提供する。
【解決手段】 X,Y,Z軸の直交座標系において、第1および第2の走行体3,4は、X軸方向のレール2に沿って走行可能である。第1の走行体3は、X軸方向の軸心およびZ軸方向の軸心の2つの軸心回りに揺動自在に第1の揺動アーム5を支持する。第2の走行体4は、Z軸方向の軸心回りに揺動自在に第2の揺動アーム6を支持する。第2の揺動アーム6の先端に、Z軸方向の軸心回りに回動自在に支持部材7を設ける。支持部材7にZ軸方向にスライド自在に支持され、かつ第1の揺動アーム5の先端にX軸方向の軸心およびZ軸方向の軸心の2つの軸心回りに回動自在に支持されたワーク保持部材8を設ける。
(もっと読む)
ロボットの干渉回避装置
【課題】ロボットを極力動作させながら、ロボットと人との接触を回避する。
【解決手段】ロボットアームが物体に近付く方向に移動する場合、人とロボットアームとがある距離以内に接近しているときには、ロボットアームを緊急停止させる。そして、人とロボットアームとがある距離を越えて離れているときには、離間距離に応じてロボットアームを減速させ、しかも、ロボットアームが人から遠ざかる方向に移動する場合には、ロボットアームを停止させたり、減速させたりすることなく、そのまま動作プログラムに従った動作を継続させる。
(もっと読む)
ロボットシステム及び物品加工方法並びに工業製品の製造方法
【課題】より少ないコストでロボットを用いた加工作業を行なうことができるようにした、ロボットシステム及び工業製品の製造方法を提供する。
【解決手段】付着材が付着した対象物を保持する保持機構18を装着したマニピュレータ101と、マニピュレータ101の動作を制御するコントローラ101Aと、マニピュレータの近傍に配設され対象物の付着材を保持する付着材剥離ユニット104と、を有し、コントローラ101Aは、保持機構18により保持された対象物の付着材を付着材剥離ユニット104に所定の進入角度で進入させて対象物と付着材とを剥離させる。
(もっと読む)
旋回装置
【課題】旋回部分の高強度化および小型化を図ることができるとともに、旋回角度を大きくとることのできるロボットの旋回装置を得ること。
【解決手段】本発明の旋回装置は、支持筐体2と、支持筐体に旋回可能に支持された旋回筐体4と、支持筐体と旋回筐体との境界を貫通するケーブル10と、を有する旋回装置であって、ケーブルを通過させる通過孔が形成されて旋回部に連結される旋回板16と、旋回筐体を旋回駆動する駆動部6に連結される駆動板14と、旋回板と駆動板とを所定の間隔で対向させた状態で接続する柱部18とを備えるクランク軸8を支持筐体の内部に有し、ケーブルは、境界部分および通過孔において略旋回軸P上を通過し、旋回板と駆動板との間を通過して旋回軸から離間し、駆動板の旋回板と対向する面の反対面側で、再度、旋回軸近傍を通過するように引き回される。
(もっと読む)
双腕ロボット
【課題】汎用性が高く複雑な組立作業ができる双腕ロボットを提供する。
【解決手段】第1アーム1は、第1ハンド2と第1視覚センサ3を有し、第1力センサ4を搭載する。第2アーム5は、第2ハンド6と第2視覚センサ7を有し、第2力センサ8を搭載する。各視覚センサ3、7で鏡筒9及び固定筒10の位置を検出して把持し、中央の組立エリア13に搬送する。フレキ9aの位置を第1視覚センサ3で測定し、フレキ9aを固定筒10の中に通し、固定筒10と鏡筒9を、力センサ4、8の出力を用いた力制御で嵌合して組み立てる。各視覚センサによって検出されたワークの位置座標を、ロボット座標に変換して各ハンドの軌道を計算し、各アームを駆動することで、2つのアームの協調動作を実現する。
(もっと読む)
ロボット装置及びワーク取り出しシステム並びにワーク取り出し方法
【課題】ハンドリングの誤動作をできるだけ低減してより精度良くワークをストッカから取り出すことができるようにした、ロボット装置及びワーク取り出しシステム並びにワーク取り出し方法を提供する。
【解決手段】複数のワークを収納したストッカ内の形状情報を形状センサによって検知し、検知結果から把持動作実行可能なワークの有無を検出し、把持動作実行可能なワークが検出されない場合には、ロボットを動作させてストッカ内のワークの配置状態を掻き乱し、
対象ワーク検出部で把持動作実行可能なワークが検出された場合には、ロボットを動作させてワークを把持する。
(もっと読む)
ロボットハンド
【課題】把持部で把持した把持対象の回転精度を向上させることができるとともに、その回転量も大きくすることが可能なロボットハンドを得ること。
【解決手段】本発明のロボットハンド1は、把持対象を把持して回転させるロボットハンドであって、把持対象を挟み込んで把持すべく平行に開閉動作する一対の把持部11,12と、把持対象を把持した状態において、把持部同士の相対的な位置をずらすように、把持対象の回転軸Oと垂直な方向に少なくとも一方の把持部を移動させる移動手段と、を有する。
(もっと読む)
ロボット制御システムおよびロボット制御方法
【課題】ロボットの自動組立を継続して行う際に様々な要因によって生じ得る作業対象部品などの位置ずれによる「チョコ停」の未然防止を可能とするロボット制御システムおよびロボット制御方法を提供する。
【解決手段】ロボット制御方法の一実施形態では、X軸方向、Y軸方向および回転角θについて水平移動可能なX−Y−θステージ9上に載置された部品供給トレイ5に搭載された作業対象部品をロボットハンド31に取り付けられた小型カメラで撮像する。撮像された画像の画像処理によって、次の作業対象部品を検出して正確な位置を算出するとともに、正常位置データとの比較によって位置誤差を算出して、その位置誤差を補正するような指令をX−Y−θステージ9に与える。そのようにして位置誤差が補正された後に、次の作業対象部品に対する作業を実行する。
(もっと読む)
ロボットの教示データを作成する方法およびロボット教示システム
【課題】ロボットの教示データを作成する方法およびロボット教示システムにおいて、ロボットアームを含むロボットの教示を簡単に行うことができるものを提供する。
【解決手段】単眼カメラ30およびステレオカメラ40が、教示者10の手首22および手21を含む教示画像を取得する(教示画像取得ステップ、ステップS1)。制御装置200は、教示画像に基づいて、手首22の位置および向きを表す手首座標を決定し(手首座標決定ステップ、ステップS2)、手首座標に基づいて、ロボットアーム110の動作を教示するロボットアーム教示データを作成する(ロボットアーム教示データ作成ステップ、ステップS11)。
(もっと読む)
ロボットの教示装置、及びロボットの制御装置
【課題】部品の種別毎に必要であったロボットの動作範囲や力覚センサ出力の許容範囲に関する作業者の初期設定作業を省略することができ、作業者による教示作業の負担を軽減させることができるロボットの教示装置、及びロボットの制御装置を提供する。
【解決手段】経路教示系127は、被組付ワーク150への組み付けが完了した状態の組付ワーク140をロボットハンド102に把持させ、組付ワーク140に過大な力が作用しないロボットハンド102の位置姿勢を探索しながら、ロボットハンド102に組付ワーク140の引抜動作を実行させる。経路教示系127は、その引抜動作の際に、ロボットハンド102の引抜移動経路を取得する。経路教示系127は、取得した引抜移動経路を時系列逆順に辿る経路を、組付作業経路として生成し、その生成した組付作業経路を動作制御部121に教示する。
(もっと読む)
ロボット制御方法、ロボット制御プログラムおよびロボット制御方法に用いられるティーチングペンダント
【課題】作業者がティーチングペンダントなどを操作して実際のロボットハンドの位置や向きの変更を繰り返すティーチング作業を行うことなく、自動的にティーチングを行うことが可能なロボット制御システムの教示方法およびその教示方法によって教示を行うロボット制御システムを提供する。
【解決手段】
教示方法の一実施形態は、トレイ20のマーカー23が含まれるように可搬型カメラ8で撮像する第1撮像工程と、その画像からマーカー23を検出して、トレイ20毎に予め登録されているデータとの照合などの判断を行う第1画像処理工程と、該当するマーカー23に応じた初期位置へロボットハンド31を移動させる初期移動工程と、ロボットハンド31の小型カメラ34によってマーカー23の少なくとも1つが含まれるように撮像する第2撮像工程と、その画像からマーカー23の位置誤差を検出する第2画像処理工程とを含む。
(もっと読む)
教示ライン補正装置、教示ライン補正方法、及びそのプログラム
【課題】基準部位の相関関係が異なっていた場合も、その誤差の影響を緩和し、ティーチングデータを精度良く補正するための教示ライン補正装置、教示ライン補正方法、及びそのプログラムを提供する。
【解決手段】予め設定された基準部位の第1基準位置aと第2基準部位の第2基準位置bとを通る線を含む平面であり、且つ、第3基準部位の第3基準位置cで決定される第1平面を規定し、検出した第1基準部位の位置a´と、検出した第2基準部位の位置b´とを通る線を含む平面であり、且つ、検出した第3基準部位の位置c´で決定される第2平面を規定し、第1基準部位を原点とし、原点の前記第1基準部位の前記第1基準位置が、検出した原点の前記第1基準部位の位置と同じ位置になり、且つ、該第1平面が該第2平面と同一平面上となる補正量を算出し、該算出した補正量に基づいて、動作ポイントが教示された基準座標を補正する教示ライン補正部とを備える。
(もっと読む)
塗装システム
【課題】例えば、車体本体に対して揺動可能に連結されたドア等を容易に開状態とすることが可能であり、しかも、作業効率に優れる塗装システムを提供する。
【解決手段】塗装システム10は、塗装ロボット14a〜14dと、オープナーロボット16とを有する。例えば、塗装ロボット14a〜14dは、壁24、26に敷設された第1案内レール28に変位自在に係合された走行台車32を介して設けられ、一方、オープナーロボット16は、壁26に敷設された第2案内レール30に変位自在に係合された走行台車34を介して設けられる。
(もっと読む)
121 - 140 / 620
[ Back to top ]