
Fターム[3C007BS10]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | 腕直列配列 (1,746) | 関節型 (1,487) | 垂直多関節型 (937)
Fターム[3C007BS10]の下位に属するFターム
Fターム[3C007BS10]に分類される特許
61 - 80 / 620
ロボット制御装置およびロボット制御方法
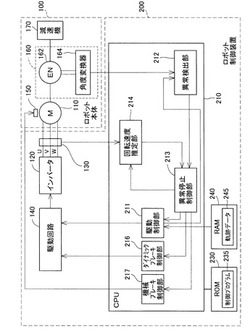
【課題】角度センサに異常が生じた場合において、サーボモータと減速機との接続部分への負担を抑制しつつ、ダイナミックブレーキと機械ブレーキとを用いて速やかにサーボモータを停止させる。
【解決手段】ロボット制御装置200は、角度センサ160の異常が検出された場合において、推定された回転速度においてダイナミックブレーキを作動させたと仮定した場合に該ダイナミックブレーキによって生じる制動トルクと、機械ブレーキ150を作動させたと仮定した場合に該機械ブレーキ150によって生じる制動トルクとのトルク合計値が、所定のトルク上限値を超える場合に、機械ブレーキを作動させずにダイナミックブレーキを作動させる第1の制動処理を実行し、トルク合計値が前記トルク上限値以下の場合には、ダイナミックブレーキおよび機械ブレーキを作動させる第2の制動処理を実行する。
(もっと読む)
自動溶接システムにおける溶接方法および自動溶接システム

【課題】レーザセンサを溶接トーチの近傍に取り付けている為に定期的な保守作業が必要になり、生産性を低下させる。
【解決手段】レーザセンサLSで溶接部位Wsを検出して教示データを補正し、溶接トーチTにより加工する自動溶接システム1である。溶接ロボットMPは溶接トーチ又はレーザセンサのどちらかを取り付けるためのツール着脱機構を有する。溶接トーチを待避させるためのツールスタンド11およびレーザセンサを待避させるためのツールスタンド12を備える。まず、溶接トーチをツールスタンド11に待避させ、レーザセンサを取り付ける。次にレーザセンサを取付けた状態のときに作成した教示データを補正する。次にレーザセンサをツールスタンド12に待避させ、溶接トーチを取付ける。補正後の教示データを再生することにより溶接加工を行う。輻射熱やヒュームからレーザセンサを保護することができる。
(もっと読む)
クランパおよび水室内作業装置
【課題】管材を安定的にクランプ保持できるクランパおよびこのクランパを備える水室内作業装置を提供すること。
【解決手段】このクランパ23は、挿入部2311aを管材に挿入して管材をクランプするクランプ機構231と、クランプ機構231を挿入部2311aの挿入方向に昇降させる昇降機構232とを備えている。また、クランプ機構231が、挿入部2311aを有するクランプ本体2311と、挿入部2311aから突出して管材に摩擦接触すると共に挿入部2311aの挿入方向に進退可能なコッタ2312と、挿入部2311aの挿入方向逆側に牽引されたときにコッタ2312を押圧して挿入部2311aから突出させるピストンロッド2313と、クランプ本体2311に一体化されてピストンロッド2313を牽引するロッドシリンダ2315とを備えている。
(もっと読む)
ロボットアームの制御方法及びプログラム
【課題】作業性の高いロボットアームの制御方法を提供する。
【解決手段】ロボットアームの制御方法は、外表部が柔軟部材600で覆われたロボットハンド(ハンド部120)を備えるロボットアームの制御方法であって、被挟持部材が置かれる載置面に柔軟部材600を押し付け、推定した柔軟部材600のつぶれ量を予め設定されたつぶれ量より大きくする工程と、ロボットハンドで被挟持部材を挟持する工程と、を備える。柔軟部材600を所定のつぶれ量で押し潰して被挟持部材を挟持するので、被挟持部材を確実に挟持でき、作業性を向上させることができる。
(もっと読む)
搬送ロボット
【課題】ワークを搬送するときの位置決め精度を確保することができると共に、ワーク運搬用箱を搬送する際にエンドエフェクタに対して作用するモーメント荷重をほとんどなくすことができ、エンドエフェクタに必要とされる許容モーメントを小さくすることができる搬送ロボットを提供すること。
【解決手段】搬送ロボット1は、把持部5によってワークを把持するときには、ロック機構部6によってバランスハンド部4を原位置に固定してエンドエフェクタ21を移動させるよう構成してある。搬送ロボット1は、把持部5によってワーク運搬用箱8Bを把持するときには、ロック機構部6によってバランスハンド部4の原位置への固定を解除することにより、バランスハンド部4、把持部5及びワーク運搬用箱8Bを合わせた重心Gが揺動軸42の下方に位置するようバランスハンド部4が揺動した状態で、エンドエフェクタ21を移動させるよう構成してある。
(もっと読む)
ワーク搬送装置
【課題】設置に広いスペースを必要としないコンパクトな装置であるとともに、効率的なワークの搬入搬出動作ができるワーク搬送装置を提供すること。
【解決手段】支持フレーム2と、第1軸J1まわりに回動自在に支持される第1アーム3と、第1軸J1上に配置され支持フレーム2に対して相対的に姿勢を保持可能な基準姿勢保持部材と、第1アーム3に対して第1軸J1と平行な第2軸J2まわりに回動自在に支持される第2アーム5と、第1軸J1と平行であって第2軸からの距離が略等距離である第3軸J3及び第4軸J4上にそれぞれ配置され、第2アーム5に対して第3軸J3及び第4軸J4まわりにそれぞれ回動自在に支持される第1及び第2ハンド51、52と、を備え、第1アーム3又は第2アーム5が回動した場合であっても、支持フレーム2に対する第1及び第2ハンド51、52の姿勢が保持されることを特徴とするワーク搬送装置。
(もっと読む)
ロボット、ロボットの駆動方法
【課題】回生エネルギーの発生を抑制してロボットの全体としての生産性を向上させる。
【解決手段】ロボットの可動部を目標位置に向けて加速し、目標位置の手前で制動力を作
用させて可動部を減速させることで目標位置に停止させる。更に、可動部に制動力を作用
させるに先立って、停止時の制動力よりは小さな制動力を作用させることにより、可動部
を緩慢に減速させる予備減速を行う。こうすれば、可動部の移動速度が低下した状態から
停止させることができるので、停止時に発生する回生エネルギーを抑制することができる
。その結果、ロボット全体としてのエネルギー効率が改善されるので生産性を向上させる
ことが可能となる。
(もっと読む)
人間協調ロボットシステム
【課題】人間がロボットに接触しうる環境においても人間の安全を確保する。
【解決手段】ロボット(2)と人間(1)とが領域を共有して協調作業を行う人間協調ロボットシステムにおいて、ロボットの先端に取付けられた作業機器(3)に設置されるかまたはロボットに設置された力センサ(4)を具備し、力センサの検出値が所定の値を超えた場合には記ロボットを停止または力センサの検出値が小さくなるようにロボットの動作を制御するようになっており、ロボットは、人間から力センサの設置位置よりも遠位に位置する第一ロボット部位(6)と、力センサの設置位置よりも人間に対して近位に位置する第二ロボット部位(7)とを含んでおり、ロボットシステムは、ロボットが人間に最も接近した場合においても人間による第一ロボット部位への接触を防止するように人間の作業領域を制限する制限部(5)を具備する。
(もっと読む)
搬送装置および搬送方法
【課題】搬送工程の自動化を容易とし、効率よくワークを搬送することのできる搬送装置および搬送方法を提供する。
【解決手段】ワーク8を把持して搬送する搬送装置1である。搬送装置1は、ワーク8に設けられた2箇所の係合部に係合可能な2つの被係合部31、33を備えた把持部2と、把持部2を移動させる移動手段とを有する。把持部2を、移動方向へ移動させる際には、把持部2の被係合部31、33を結ぶ基準直線が移動方向の水平方向成分の方向と平行とし移動させるよう構成されている。
(もっと読む)
搬送ロボット
【課題】シンプルな構造で複数の種類のワークを搬送することができる搬送ロボットを提供する。
【解決手段】三次元に移動可能な移動部11を備えた搬送ロボット1である。移動部11は、第1ワーク8を把持するための第1把持部3と第2ツール4を接続するための第1接続部23とを設けた第1ツールを有しする。第2ツール4は、第1接続部23に着脱可能に係合する第2接続部43を有すると共に、第2ワーク9を把持するための第2把持部5を有する。第1接続部23と第2接続部43は鉛直方向に互いに嵌合することにより水平方向の位置決めを行う位置決め部24、44を有している。
(もっと読む)
オフラインティーチング方法
【課題】溶接システムにおけるオフラインティーチングを、操作の熟練を要することなく、高精度で、実施することができるオフラインティーチング方法を提供する。
【解決手段】
溶接線方向をY方向、被溶接材1の面に垂直の方向をZ方向、Y方向及びZ方向に垂直の方向をX方向とする3次元直交座標系を設定する。そして、前回のステップから現ステップを向く前段座標系として、XAYAZAの座標系Aを設定し、現ステップから次順のステップを向く後段座標系として、XBYBZBの座標系Bを設定する。よって、前回のステップから現ステップまでの溶接線セグメントはYA方向となり、現ステップから次順のステップまでの溶接線セグメントはYB方向となる。このワークを基準とする座標係で溶接線を規定し、オペレータがこのワーク座標上で、トーチ移動量を指定する。
(もっと読む)
駆動源ユニット、及びロボット
【課題】ブレーキとモーターとを配置するために必要な体積を抑制して、モーター及びブレーキを収容するために必要なアームの大きさが増大することを抑制することができる駆動源ユニット、及びロボットを提供する。
【解決手段】中心軸まわりに回動する出力軸を備える駆動源と、出力軸に係合しており、出力軸と略一体に、中心軸まわりに回動する出力部材と、出力軸の軸方向において駆動源と並べて配設されており、出力軸の回動を制動することが可能な制動手段と、を備え、出力部材と制動手段とは、出力軸の軸方向において、少なくとも一部分が、同じ位置に配設されている。
(もっと読む)
教示データの修正システム
【課題】加工ワークの形状が変化する場合に簡易に教示データの修正が行える教示データの修正システムの提供。
【解決手段】教示点を修正する教示データの修正システムにおいて、第一の加工ワーク13を加工するための教示点に関するパラメータを記憶する記憶手段と、第一の加工ワークとは形状の異なる第二の加工ワーク14に関する画像と教示点の画像とを重ね合わせて表示をするとともに、ポインティング手段で表示画面中の位置を指定できる表示手段と、ポインティング手段で教示点に関するパラメータが変更された際に、ポインティング手段で示される表示画面中の位置と変更前の教示点の位置とに基づいて、変更後の変更教示点に関するパラメータを算出する算出手段と、記憶されたパラメータを、変更後の変更教示点に関するパラメータにより更新する更新手段と、更新後の変更教示点と第二の加工ワークに関する画像とを重ね合わせて表示させる制御手段と、を具備する。
(もっと読む)
把持搬送装置および把持搬送方法
【課題】把持機構を支持する支持移動体と障害物の衝突を検知できるとともに、衝突時のオーバートラベル量による支持移動体の損傷を防止できる把持搬送装置を提供する。
【解決手段】支持移動体5の外面に取り付けられる衝撃吸収センサ9を備える。衝撃吸収センサ9は、弾性体と、該弾性体に組み込まれた衝突検出部と、を有する。衝突検出部は、該弾性体の弾性変形により衝突信号を出力する。衝突信号を受けることで、前記支持移動体5の移動を停止させる制御を行う制御装置11をさらに備える。支持移動体5が設定速度で移動している時に衝突信号が出力されてから、支持移動体5が停止するまでに支持移動体5が移動する距離をオーバートラベル量として、弾性体の最大弾性変形量は、オーバートラベル量以上である。
(もっと読む)
視覚センサのマウント装置と方法
【課題】視覚センサの正確な位置と姿勢が不明である場合、或いはその位置又は姿勢が変化している場合でも、視覚センサをロボットのハンドに正確にマウントすることができる視覚センサのマウント装置と方法を提供する。
【解決手段】ロボット座標系ΣRにおいてハンド11を3次元移動可能なロボット2と、視覚センサ座標系ΣSにおいてハンドの位置と姿勢を非接触で検出可能な視覚センサ14とを備える。ロボット座標系において視覚センサ14の検出範囲内にハンド11を移動して(S1)、視覚センサ14により視覚センサ座標系におけるハンド11の位置と姿勢を非接触で検出し(S2)、この検出結果からハンド11と視覚センサ14の相対位置関係を算出し(S3)、測定した相対位置関係からロボット座標系ΣRにおける視覚センサ14の位置と姿勢を算出し(S4)、ロボット座標系においてハンド11を移動してハンドに視覚センサ14をマウントする(S5)。
(もっと読む)
クローラユニット及びクローラ型走行ロボット
【課題】内部への異物の混入を防止するクローラユニット及びクローラ型走行ロボットを提供する。
【解決手段】複数のホイールと、複数のホイールに巻かれ且つ複数のホイールが回転するとその外周を周回するクローラベルト5とを備えたクローラユニット2が、クローラユニット2の少なくとも一方の側面を覆う側面カバー4を具備し、側面カバー4の周縁と対応するクローラベルト5の側周縁とが全周に亘って結合し、側面カバー4がクローラベルト5の周回と共に回転する。
(もっと読む)
ロボットの角度データ変換方法及びこの方法を実施するための制御装置
【課題】ロボット交換時におけるデータ設定の誤りを防ぐ。
【解決手段】交換前のロボットが制御装置に接続された状態で、補助記憶装置に記憶された交換前ロボットの幾何学的誤差データを制御装置の主記憶装置にロードし、かつ幾何学的誤差データに付記されたID情報と交換前ロボットのID情報とを照合し(S101)、次にロボットを制御装置から外して交換し(S102)、交換後ロボットが制御装置に接続された状態で、補助記憶装置に記憶された交換後ロボットの幾何学的誤差データを主記憶装置にロードし、かつ幾何学的誤差データに付記されたID情報と交換後ロボットのID情報とを照合し(S103)、交換前及び交換後のロボットの幾何学的誤差データを反映したツール先端位置間の誤差が十分小さくなるように動作プログラムに含まれる角度データを変換し、変換された角度データを含むように動作プログラムを上書き保存する(S104)、工程を備える。
(もっと読む)
ロボット装置およびロボット装置による把持方法
【課題】対象物の位置情報に誤差が含まれる場合にも、確実に対象物を把持することが可能なロボット装置を提供する。
【解決手段】このロボット装置100は、ロボットアーム10と、ロボットアーム10の先端に設けられ、力制御を行うための力センサ21a、22aおよび23aを有する多指ハンド部20と、視覚センサ30による検出により、把持対象物110の少なくとも位置情報を取得する画像処理部43と、画像処理部43により取得した把持対象物110の少なくとも位置情報に基づいてロボットアーム10を移動させて把持対象物110に多指ハンド部20を近づけていき、多指ハンド部20の力センサ21a、22aおよび23aの出力に基づいて把持対象物110に対する実際の接触位置を検出し、検出した接触位置の情報に基づいて把持対象物110の位置情報を修正する制御装置40とを備える。
(もっと読む)
マニピュレータ及びマニピュレータの制御方法
【課題】本発明は、小型な駆動部を有するマニピュレータを、または複数の構造物が存在する狭隘部へマニピュレータを挿入にできるマニピュレータの制御方法を提供することである。
【解決手段】本発明は、上記目的を達成するために、少なくとも一つの駆動部と、前記駆動部に接続する少なくとも一つのリンクとを備えるマニピュレータの前記駆動部の姿勢角を検出し、前記姿勢角から前記マニピュレータの手先の位置および姿勢を算出するマニピュレータまたはマニピュレータの制御方法において、前記姿勢角の検出は前記リンクの駆動軸またはその延長線が前記姿勢検出器の検出軸とが一致するように設けられた前記姿勢検出器によって行なうことを第1の特徴とする。
(もっと読む)
アーム装置
【課題】容易かつ迅速に対象物を任意の空間位置で固定することのできるアーム装置を提供する。
【解決手段】着脱自在に取り付けられた対象物Oを任意の空間位置で固定するためのアーム装置1であって、基台2に設けられた第1の関節機構3と、基端部41が前記第1の関節機構3によって継合され、当該第1の関節機構3によって軸回りの回動と角度の変位とこれらの動作のロックとが行われ、先端部42に前記対象物Oを着脱自在に取り付ける対象物着脱手段6を備えるアーム部4と、前記基端部41と前記先端部42との間に、前記アーム部4の軸回りの回動と角度の変位とこれらの動作のロックとを行う少なくとも1つの第2の関節機構5と、を有し、第1の関節機構3および第2の関節機構5はともに、伸縮する軸部材71の伸縮に応じて縮径および拡径するように固定されたボール部72を有するボールジョイント74であることを特徴とする。
(もっと読む)
61 - 80 / 620
[ Back to top ]