
Fターム[3C007BS10]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | 腕直列配列 (1,746) | 関節型 (1,487) | 垂直多関節型 (937)
Fターム[3C007BS10]の下位に属するFターム
Fターム[3C007BS10]に分類される特許
81 - 100 / 620
アーム装置
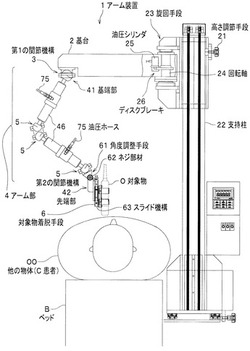
【課題】容易かつ迅速に対象物を任意の空間位置で固定することのできるアーム装置を提供する。
【解決手段】着脱自在に取り付けられた対象物Oを任意の空間位置で固定するためのアーム装置1であって、基台2に設けられた第1の関節機構3と、基端部41が前記第1の関節機構3によって継合され、当該第1の関節機構3によって軸回りの回動と角度の変位とこれらの動作のロックとが行われ、先端部42に前記対象物Oを着脱自在に取り付ける対象物着脱手段6を備えるアーム部4と、前記基端部41と前記先端部42との間に、前記アーム部4の軸回りの回動と角度の変位とこれらの動作のロックとを行う少なくとも1つの第2の関節機構5と、を有し、第1の関節機構3および第2の関節機構5はともに、伸縮する軸部材71の伸縮に応じて縮径および拡径するように固定されたボール部72を有するボールジョイント74であることを特徴とする。
(もっと読む)
ロボット教示システム

【課題】作業効率の向上化が図れ、なお且つ、危険も伴わないロボット教示システムを提供することを目的としている。
【解決手段】ワークWに対して溶接等の作業を行うロボット1と、前記ロボット1の作業現場を撮影可能な複数の多視点画像撮影カメラ2と、前記各多視点画像撮影カメラ2によって撮影された画像を取得し、且つ、その取得した画像から前記ロボット1の作業現場の任意視点画像を生成する画像生成手段と、前記生成された任意視点画像を表示する表示手段と、前記表示された画像を用いて前記ロボット1の作動を指示可能な指示手段と、前記指示手段によって指示された作動に応じて前記ロボット1を制御するロボット制御手段とを有してなる。
(もっと読む)
切削部を有するワークの把持装置及び把持方法
【課題】把持されるワークの把持部に切削部がある場合でも、ワークの位置と姿勢のずれを回避し、ワークを正しくセンタリングして把持することができるワークの把持装置及び把持方法を提供する。
【解決手段】ワーク1を把持するハンド12と、ワークを撮影するカメラ14と、ハンドを3次元的に移動可能なロボット16と、ロボットを制御するロボット制御装置18とを備える。カメラ14により、ハンド12による把持面全体を含むワークの画像5を撮影し(S1)、ロボット制御装置18により、画像5を画像処理して把持面1aに存在する切削部2aを検出し、切削部2a以外の把持面1aを把持するようにハンド12の姿勢を制御してワーク1を把持する。
(もっと読む)
産業用ロボットのエンドエフェクタ取付用フランジの油止め構造
【課題】フランジ部分におけるゴム製シール部材から滲出した潤滑油がエンドエフェクタやワーク等に付着することを防止する。
【解決手段】内輪16aと外輪16bの間にはオイルシール25が設けられ、油吸収部材26がオイルシール25外側端面を塞ぐように設けられている。この油吸収部材26は、合成樹脂製で可撓性を有する帯状のホルダ27と、合成樹脂製で帯状の結束バンド28とで取り付けられている。ホルダ27は、ホルダ本体27aに多数の櫛歯板部27bを有し、さらに、断面凸状のビード部27cを有する。このビード部27cを外輪16bの第1の外輪部16b1及び第2の外輪部16b2の接合部外周部に存在する環状凹部16kに嵌合させた形態で、ホルダ27を外輪16bに巻回して櫛歯板部27bを油吸収部材26の端面に当て、結束バンド28により外輪16bに締付固定する。
(もっと読む)
マニピュレータの制御装置
【課題】ロボットアームと多指ハンドとを備えたマニピュレータの制御方法であって、アームとハンドの制御装置の独立性を保ちながら、アーム側はハンドの位置姿勢情報に基づくツール位置を制御することができ、ハンド側は作業空間における自身の位置姿勢を制御することを可能にする。
【解決手段】指令装置側に作業プログラムとは別に、周期的に動作する補助プログラムを設け、ロボットアームと多指ハンドの位置姿勢を座標変換してアームのツール位置姿勢とハンドの作業空間における位置姿勢を設定させる。これによって、作業プログラムは作業空間における多指ハンドの動作指令や、ハンドの作業点を作業空間における指定位置に動作させるようなロボットアームの動作指令をおこなう。
(もっと読む)
ロボットセル装置及び生産システム
【課題】一対のロボットアームの協調動作可能領域を広くすることができ、作業性のよいロボットセル装置を提供する。
【解決手段】ワークが載置される平面視四角形状の平面8を有する架台1を備える。各ロボットアーム2,3の基端部2a,3aが、架台1の平面8の4隅部8A,8B,8C,8Dのうち互いに対角位置の2隅部8A,8Bのそれぞれに固定される。そして、架台1の平面8上の空間に一対のロボットアーム2,3で協調動作可能な協調動作可能領域が形成される。
(もっと読む)
走行ロボット
【課題】従来の走行ロボットは、各駆動輪や各関節部にモータや回転駆動手段を備えていたので、重量が増すと共に、制御も複雑になり易く、小型軽量化や走行性及び信頼性のさらなる向上が要望されていた。
【解決手段】車体Bの前部に、ロール軸回りに回動自在なサスペンションアーム1と、サスペンションアーム1の両端部に対してピッチ軸回りに回転駆動可能な左右の前部支持脚2を備えると共に、各前部支持脚に少なくとも一つの駆動輪Wfを夫々備え、車体Bの後部に、ピッチ軸回りに回転駆動可能な左右の後部支持脚3と、各後部支持脚3に対してピッチ軸回りに回動自在な旋回脚4を備えると共に、各旋回脚4の両端部に駆動輪Wrを夫々備えた走行ロボットRとした。モータ類を削減して小型軽量化や制御の簡素化を実現すると共に、常に全ての駆動輪を接地させることを可能にして、走行性能のさらなる向上を実現し、月や惑星での探査活動に非常に好適なものとなる。
(もっと読む)
ロボットアームのためのハンドカメラ装置
【課題】 ハンドに突出部を形成することなく、しかも、ロボットアームの制御系を複雑にすることなく、把持した把持対象物を正確に目標位置に移動、位置決め可能とする。
【解決手段】 ロボットアームのハンドに、把持対象物の位置及び方向を観測するカメラを設置し、その撮像情報に基づいて把持対象物を認識し、ハンドで把持させた後、目標位置を探索及び認識して、把持対象物を目標位置に移動させるロボットアーム及びハンドの制御装置において、ハンドの把持部に前方カメラを設けるとともに、側方にも側方カメラを設置し、ハンドが把持対象物を把持する直前あるいは直後において、前方カメラの撮像情報に基づく制御から、側方カメラの撮像情報に基づく制御に切り換える切換手段を具備させ、把持した把持対象物に視界を妨げられることなく、把持対象物を正確に目標位置に移動、位置決めすることができる。
(もっと読む)
タンデムアーク溶接システムを制御するロボットコントローラ、それを用いたアーク倣い制御方法およびタンデムアーク溶接システム
【課題】アーク倣いを任意の回転中心で行った場合においても、先行極に位置ずれが発生せず、溶接欠陥が生じることのないタンデムアーク溶接システムを制御するロボットコントローラ、それを用いたアーク倣い制御方法およびタンデムアーク溶接システムを提供する。
【解決手段】タンデムアーク溶接システムを制御するロボットコントローラ8は、先行極処理部11aが算出した先行極変化量から左右および上下方向の位置ずれを補正する先行極補正量を算出する先行極補正部14aと、後行極処理部11bが算出した後行極変化量から回転方向の位置ずれを補正する後行極補正量を算出する後行極補正部14bと、先行極2aの位置ずれを補正する回転中心補正量を算出する回転ずれ補正制御処理部16と、ティーチング位置と倣い補正時における溶接トーチ2の回転中心の位置を補正するロボット軌跡計画処理部13と、を備える。
(もっと読む)
ワーク搬送システム
【課題】より簡易な構成で生産性の高い生産ラインを構築できるワーク搬送システムを提供する。
【解決手段】搬送装置10、11は、レール軌道14、15の上にそれぞれ独立して移動する複数の搬送ロボット16a〜16dを有し、各搬送ロボットは、ワーク12を保持するハンド17a〜17dを備える。例えば、搬送ロボット16aが保持するワーク12に対して、作業装置18aが直接組立作業や加工処理を行い、作業終了後に搬送ロボット16aが下流方向へ移動し、隣接する次工程の搬送ロボット16bとの間でワーク12の受渡しを行う。次工程の搬送ロボット16bは同様の動作を行い、ワーク12を矢印で示す下流方向へ順次搬送する。隣接する搬送ロボットとのワーク受渡し位置を変更することで、生産ラインの高速化を図ることができる。
(もっと読む)
ロボットの負荷推定装置及び負荷推定方法
【課題】オンラインで特定動作を必要とせず、ロボットが把持するワークの重量及び重心位置を推定する装置を提供する。
【解決手段】ワーク重量を想定せずにモータに向けて送られたトルク指令と把持されたワークの重量に応答して現実に生じているトルクとの差異に着目してワークの重量を推定する。ロボットに作用する重力トルク及び摩擦トルクを演算する手段(27)と、現実に生じているトルクから重力トルク及び摩擦トルクを減算することにより正味の外乱トルクを演算する手段(24)と、正味の外乱トルクをロボットの手先力及び手先モーメントに変換する手段(25)と、負荷が追加される前にロボットの手先に生じている第1の手先力推定値と、負荷が追加され微小量だけ持ち上げた後にロボットの手先に生じている第2の手先力推定値との差分を計算することにより負荷の重量を推定し、同様にして第1及び第2の手先モーメントの差分を計算することにより負荷の重心位置を推定する手段(26)とを備えている。
(もっと読む)
ロボットの教示手順校正装置および方法
【課題】ロボットの特徴である高速性を失わずに作業対象物に接触するとともに接触位置検出し、エンコーダ分解能程度のサブミリ単位の高精度検出することで、高速高精度なロボットの作業座標系のキャリブレーション(校正)方法を提供する。
【解決手段】弾性変形領域を持ったプローブを用いて、位置姿勢誤差発生前後において接触位置検出処理を所定回数繰り返すことで、ロボット座標に対する作業対象物の位置姿勢を算出し、位置姿勢誤差を計算し、位置誤差発生前の教示データを修正するという手順で処理する。
(もっと読む)
ロボットキャリブレーション装置及びキャリブレーション方法
【課題】 ロボットキャリブレーションにおける精度を維持しつつ作業負荷を低減することを目的とする。
【解決手段】 ロボットの先端に弾性変形領域を持つプローブを取り付け、キャリブレーション用の定盤平面に垂直になる位置を教示することで、ロボットと定盤の位置関係をラフに教示し、さらにプローブ先端位置一定動作を生成し、位置検出動作指令を生成し、位置検出動作を実行し、プローブ先端位置一定動作時の精度(誤差)を計算し、測定したプローブ先端位置一定動作時の精度(誤差)と幾何学的パラメータ誤差からキャリブレーションを自動実行する。
(もっと読む)
把持ロボットおよび把持方法
【課題】少ない計算コストで、確実かつ完全に、対象物を把持する技術を提供する。
【解決手段】把持ロボットは、アーム部と前記アーム部に設けられた1対のハンド部と前記1対のハンド部のそれぞれに設けられた指部とを有し、台上の対象物を把持する把持部と、前記把持部に設けられ、前記対象物を撮像するカメラ部と、前記把持部および前記カメラ部を制御する制御部とを備え、前記制御部は、前記カメラ部によって撮像された撮像画像内における重力方向を特定し、前記撮像画像内における重力方向に基づいて前記撮像画像内において前記対象物と前記台との境界部を検出し、前記境界部の位置に基づいて前記台と前記対象物との間に前記1対のハンド部のそれぞれの指部を挿入するように前記把持部を制御する。
(もっと読む)
加工システム及び加工方法
【課題】ツールの交換の際の通信時間及びロボットの移動時間を短縮すること。
【解決手段】締め付け機25が取り付けられたロボット22は、ツール101,102を取り付ける取り付け部91,92を有している。ロボット23の腕部には、交換用のツール411,412を収納する収納部材401が設けられている。ロボット制御装置は、ロボット22,23の各々の動作を制御することによって、ツール101,102が取り付け部91,92に取り付けられ、ツール411,412が収納部材401に収納されている第1の状態から、ツール101,102が収納部材401に収納され、ツール411,412が取り付け部91,92に取り付けられている第2の状態に遷移させる。
(もっと読む)
多関節型ロボットの速度指令プロファイルの生成方法
【課題】カットオフ周波数の高いローパスフィルタを適用したときに停止振動を低減するためには、カットオフ周波数の低いローパスフィルタを適用したときと同等の減速時間を持たせられるような加減速特性を実現し、停止振動が発生し難い長い減速時間を持った速度指令プロファイルを生成する必要がある。
【解決手段】プログラムで指定された動作速度によらず加速度が常に一定となる手法により生成した速度指令プロファイルにカットオフ周波数の低いローパスフィルタを適用したときの減速時間と、前記速度指令プロファイルに前記ローパスフィルタよりもカットオフ周波数が高いローパスフィルタを適用したときの減速時間とが、同等になるようにして求められた加減速特性を用いて生成した速度指令プロファイルに、前記カットオフ周波数の高いローパスフィルタを適用したときの速度指令プロファイルを求める。
(もっと読む)
オブジェクト検出装置、オブジェクト検出方法、オブジェクト検出プログラム、およびロボット
【課題】画像中のオブジェクトの位置および回転角度の検出時間を削減する。
【解決手段】参照オブジェクトモデルを用いた投票により画像からオブジェクトを検出するオブジェクト検出装置において、オブジェクトモデルの代表点を中心としてオブジェクトモデルを所定の角度ずつ回転して得られる回転オブジェクトモデルそれぞれの特徴点の座標値を参照オブジェクトモデルとして記憶する記憶部20と、画像の輪郭を抽出する輪郭抽出部33と、記憶部20から読み出した前記参照オブジェクトモデルの座標値と、前記画像の輪郭における点の座標値と、に基づき算出した座標値に対して投票を行ってその積算値である投票数を算出する投票数算出部36と、算出した座標値から、投票数が所定の閾値を超える算出した座標値を抽出する位置抽出部37と、を備える。
(もっと読む)
ロボットの教示再生装置および教示再生方法
【課題】過大力とタクトタイム増加を防ぎ、力制御に関する知識のない教示者でも直感的な操作で簡単に嵌合などの接触作業を成功率高く教示・再生できるようにする。
【解決手段】教示ペンダントに力制御設定手段と力制御手動操作手段と力制御状態表示手段と作業状態保存手段を備え、力制御設定手段は座標系の各軸方向それぞれに対する操作モード選択手段を備え、テスト運転で動作プログラムを再生している最中に、力制御手動操作手段は操作モードにしたがって位置または力指令を動作プログラムの動作に重畳して増減し動作を修正する。この重畳された修正動作によりロボット作業を適切な力加減により、オペレータの判断で作業を成功に導く。この時のデータをロボットの修正された動作プログラムデータとして再度登録し直す。再登録された動作プログラムはオペレータが適切に誘導したデータであるため成功確率が高いティーチングデータとなる。
(もっと読む)
垂直多関節型ロボット及びロボットセル
【課題】天井に設置する場合であれ、設置対象となる天井の高さを低く抑えることのでき
る垂直多関節型ロボット、及び該垂直多関節型ロボットを備えるロボットセルを提供する
。
【解決手段】天吊りされる垂直多関節型ロボット10は、複数のアームが重力方向に非平
行な回転軸C2,C3,C5を有する関節を介して順に連結されて構成されるアーム部と
、前記アーム部を支持するベース11とを備えている。垂直多関節型ロボット10は、前
記ベース11の少なくとも一部が天井面を貫通した状態で天井部24に設置される。
(もっと読む)
関節駆動装置及び多軸マニピュレータ
【課題】関節駆動装置の数を関節の数と等しくすることができ、駆動力伝達用の線状部材の経路長の変化を各関節部で解消することができるとともに、駆動力伝達用の線状部材の交換を短時間で容易に行うことができ、利便性を高めることができるようにする。
【解決手段】所定のリンク部材と次のリンク部材とを回転可能に接続する関節軸上に配設された関節部の駆動用の線状部材から駆動力を受けて回転することによって所定のリンク部材に対して次のリンク部材を回転させる被駆動部材と、関節軸上に配設された経路長補償ユニットであって、所定のリンク部材に対応して配設された他の関節部の駆動用の線状部材からの駆動力を、次のリンク部材に対応して配設された他の関節部の駆動用の線状部材に伝達するとともに、他の関節部の駆動用の線状部材の経路長の変化を吸収する経路長補償ユニットとを有する。
(もっと読む)
81 - 100 / 620
[ Back to top ]