
Fターム[3C007CT02]の内容
マニピュレータ、ロボット (46,145) | コラム (498) | コラムの動作形態 (465) | 水平面内において直線移動 (114)
Fターム[3C007CT02]の下位に属するFターム
X、Y軸両方向に移動可能 (16)
Fターム[3C007CT02]に分類される特許
1 - 20 / 98
吸着装置及びロボットシステム
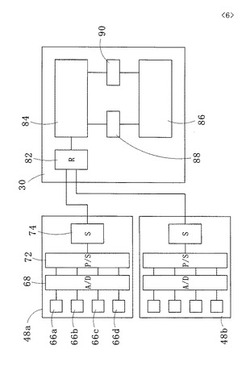
【課題】吸着パッドの摩耗を検出することが可能な吸着装置及びロボットシステムを提供する。
【解決手段】ロボットシステム10は、搬送物Gを吸着する吸着パッド76及び吸着パッド76の吸着圧力を検出する圧力センサ66a〜66dが設けられたエンドエフェクタ48a、48bを有するロボット20と、吸着パッド76が搬送物Gを吸着してから吸着パッド76の吸着圧力が安定するまでの間に圧力センサ66a〜66dが検出した吸着圧力の過渡データDに基づいて、吸着パッド76の摩耗を判断する判断部86を有する制御装置30とを備える。
(もっと読む)
基板搬送装置および基板搬送システム

【課題】基板カセットと基板受け渡し先との間でガラス基板の受け渡しを効率良く行うことのできる廉価でコンパクトな構成の基板搬送装置を提案すること。
【解決手段】基板搬送装置2は、ガラス基板7の縁端をクランプしエアー浮上させた状態で、基板カセットからガラス基板7を引き抜くので、狭い間隔で高密度に収納されているガラス基板を引き抜くことができ、エアー浮上状態でガラス基板7を移動させるので、ガラス基板に損傷、異物付着が生じない。基板載置面に引き込まれたガラス基板を基板支持アームで支持し、この状態で基板搬送装置2が収納先の基板カセットまで移動し、基板支持アームによってガラス基板を引き渡し先に渡す。一台で基板カセットからのガラス基板の引き抜き、移送、基板受け渡し先への引き渡しを行うことができ、設置スペースが少なくて済む廉価でコンパクトな基板搬送システムを構築できる。
(もっと読む)
搬送装置および搬送方法
【課題】搬送工程の自動化を容易とし、効率よくワークを搬送することのできる搬送装置および搬送方法を提供する。
【解決手段】ワーク8を把持して搬送する搬送装置1である。搬送装置1は、ワーク8に設けられた2箇所の係合部に係合可能な2つの被係合部31、33を備えた把持部2と、把持部2を移動させる移動手段とを有する。把持部2を、移動方向へ移動させる際には、把持部2の被係合部31、33を結ぶ基準直線が移動方向の水平方向成分の方向と平行とし移動させるよう構成されている。
(もっと読む)
産業用ロボット
【課題】ハンドの先端と周辺機器とが衝突したときの衝撃が大きい場合であっても、ハンドの損傷を軽減することが可能な産業用ロボットを提供する。
【解決手段】搬送対象物2を搬送する産業用ロボット1は、搬送対象物2が搭載されるハンド3と、産業用ロボット1の周辺機器にハンド3の先端が衝突したことを検知するための検知機構とを備えるとともに、ハンド3が所定方向を向いた状態で略直線状に移動するように構成されている。ハンド3は、ハンド3の先端部分を構成するとともに周辺機器にハンド3の先端が衝突したときにハンド3の基端側に向かって移動可能な衝撃吸収部材20を備えている。
(もっと読む)
産業用ロボット
【課題】アームを支持する支持部材を上下方向へ移動可能に支持する柱状部材を備えている場合であっても、比較的簡易な構成で、搬入される搬送対象物の位置ずれを抑制しつつその傾きを適切に補正することが可能な産業用ロボットを提供する。
【解決手段】産業用ロボット1は、搬送対象物が搭載されるハンド3と、ハンド3が連結されるアーム4と、アーム4を支持する支持部材6と、支持部材6を上下方向へ移動可能に支持する柱状部材7と、基台8と、柱状部材7の下端を支持するとともに基台8に対して回動可能な旋回部材9と、基台8に対して柱状部材7を上下方向に直交する所定方向へ相対移動させる移動機構10とを備えている。
(もっと読む)
生産システム
【課題】ワークを把持したロボットが複数の処理装置間を順次移動してワークを製品化する生産システムにおいて、ロボットと処理装置との間のワークの授受位置を自動で効率的に取得可能とし、システムのフレキシビリティの向上を図る。
【解決手段】処理装置4は、指向性のある無線の通信部41を備え、ロボット3は、処理装置4の通信部41との間で相互に通信する指向性のある無線の通信部31と、処理装置4上の所定の特徴点42を撮像して位置認識を行う画像処理部(CCDカメラ32a)と、ハンド部33と、を備え、ロボット3は、相互の通信部31,41を用いて処理装置4に対する位置関係を検出し、その検出の後に、画像処理部を用いて特徴点42を認識することにより処理装置4に対する精密な位置関係を検出し、これに基づいてワークの授受位置を取得する。2段階の位置検出により、狭いカメラの撮像範囲で精度良く効率的に位置を取得できる。
(もっと読む)
ロボット
【課題】適切な剛性を有する直動軸受が選定されたロボットシステムを提供する。
【解決手段】この塗装ロボット100(ロボットシステム)は、ロボット本体10と、ロボット本体10を直線移動可能に支持する直動軸受2および3とを備え、直動軸受2および3は、直動軸受2および3の撓みに起因する変位を考慮して予め設定された、ロボット本体10の重量と直動軸受2および3の剛性との相関関係に基づいて選定されている。
(もっと読む)
ロボットアーム
【課題】 比較的簡素な構造で緩衝作用が得られる構造を備えるロボットアームの提供。
【解決手段】 XθZ駆動方式ロボットのロボットアームにおいて、θ軸回転手段7で旋回する第1アーム1と、当該第1アーム1の先端部に連結し上下左右に揺動可能な第2アーム2を備えてなり、当該第2アーム2の先端部に作業部を備え、前記第1アーム1の先端部に横揺動軸4を支持し、当該横揺動軸4に前記第2アーム2の基部が支持する縦揺動軸5を支持し、前記第1アーム1と第2アームとの間に緩衝手段6を備え、当該緩衝手段6は、第2アーム2を第1アーム1に対する定常姿勢へ誘導する姿勢維持手段と、第2アーム2を第1アーム1に対する定常姿勢から第2アーム2の先端部を左右及び上方へ誘導可能な退避手段を備えるロボットアーム。
(もっと読む)
ワーク搬送システム
【課題】より簡易な構成で生産性の高い生産ラインを構築できるワーク搬送システムを提供する。
【解決手段】搬送装置10、11は、レール軌道14、15の上にそれぞれ独立して移動する複数の搬送ロボット16a〜16dを有し、各搬送ロボットは、ワーク12を保持するハンド17a〜17dを備える。例えば、搬送ロボット16aが保持するワーク12に対して、作業装置18aが直接組立作業や加工処理を行い、作業終了後に搬送ロボット16aが下流方向へ移動し、隣接する次工程の搬送ロボット16bとの間でワーク12の受渡しを行う。次工程の搬送ロボット16bは同様の動作を行い、ワーク12を矢印で示す下流方向へ順次搬送する。隣接する搬送ロボットとのワーク受渡し位置を変更することで、生産ラインの高速化を図ることができる。
(もっと読む)
自動溶接方法及び装置
【課題】 母管に複数の枝管を溶接する溶接処理に要する時間を低減させる。
【解決手段】 母管1の長手方向に延びるガイドレール12に、多関節ロボット14に枝管溶接機4を備えた溶接モジュール13と、別の多関節ロボット16にセンサ装置17を備えたセンシングモジュール15を、独立に往復動可能に取り付ける。母管1に、複数の枝管2a〜2nを取り付ける場合は、母管1の長手方向一端側より他端側へ並ぶ各枝管2a〜2nについて、センシングモジュール15のセンサ装置17によるセンシング作業を順次行ない、それぞれの位置計測結果の情報を制御装置18に一旦記憶する。センシングモジュール15による溶接順序が後の枝管2b〜2nについてのセンシング作業と並行して、溶接モジュール13により、制御装置18より得た位置計測結果の情報を基に枝管溶接機4の位置を制御しながら各枝管2a〜2nの母管1への溶接作業を行わせる。
(もっと読む)
産業用ロボット
【課題】クリーンルームで使用可能でタクトタイムを短縮できる産業用ロボットを提供する。
【解決手段】ワークを載置するハンド8と、前記ハンド8を前記ワークの所定の位置から取り出しおよび供給するアーム2と、前記アーム2と上下移動機構11が支持部材10により連結され、前記上下移動機構11の下部に台座13が設けられ、前記台座13が旋回する基台14に振り子ストッパ17が備えられたものである。
(もっと読む)
産業用ロボット
【課題】本発明は、クリーンルームで使用可能でタクトタイムを短縮できる産業用ロボットを提供することを目的とするものである。
【解決手段】ワークを載置するハンド8と、前記ハンド8を前記ワークの所定の位置から取り出しおよび供給するアーム2と、前記アーム2と上下移動機構11が支持部材10により連結され、前記上下移動機構11の下部に台座13が設けられ、前記台座13が旋回する基台14に振り子ストッパ17が備えられたものである。
(もっと読む)
ロボットの制振装置
【課題】プーリによってアーム部材を駆動するロボットにおいて、設置位置の制限を受けることなく振動の減衰性能が高いロボットの制振装置を提供する。
【解決手段】第二制振用プーリ52は、錘部材と円弧ばねの作用によって姿勢制御ベルト43の伸縮にともなう従動部材25の振動を打ち消す方向へ揺動する。姿勢制御ベルト43の伸縮にともなう従動部材25の振動を打ち消す方向の揺動は、制振用ベルト53を経由して第一制振用プーリ51に伝達される。これにより、従動部材25に振動が生じようとしても、この振動は第二制振用プーリ52から伝達された揺動によって打ち消される。また、錘部材を含む第二制振用プーリ52は、制振用ベルト53を経由して第一制振用プーリ51に接続することにより、アーム部材21の先端部32よりもモータ22側に配置される。そのため、錘部材を含む第二制振用プーリ52は、自由な配置が可能となる。
(もっと読む)
駆動ユニットを備えた機械構造
【課題】広い移動領域を得られ、駆動源を有効に利用しやすい、駆動ユニットを備えた機械構造を提供する。
【解決手段】少なくとも3つの駆動ユニット50x,52x,54xが、基準面に沿って1方向又は2方向に能動移動が可能である。駆動ユニット50x,52x,54xが基準面に沿って能動移動する自由度の合計の数が4以上である。駆動ユニット50x,52x,54xは、それぞれ、基礎部材20又は支持部材30,32,34の可動部30y,32y,34yに固定され、移動体11を移動及び回転させる。少なくとも1つの駆動ユニット50x,52x,54xが、支持部材30,32,34の可動部30y,32y,34yに固定され、基準面に沿って能動移動することにより、支持部材30,32,34の案内部30x,32x,34xに固定された仮想線30z,32z,34zに沿って移動が可能である。
(もっと読む)
ロボット制御装置およびロボット制御装置の制御方法
【課題】待機時のアーム等の落下を防止しつつ待機時の産業用ロボットの消費電力を低減することが可能で、かつ、産業用ロボットのスループットを向上させることが可能なロボット制御装置を提供する。
【解決手段】ロボット制御装置15は、産業用ロボットを駆動するためのモータ17と、モータ17を制動するための制動手段18と、モータ17を駆動するモータ駆動手段20と、モータ駆動手段20に電力を供給する電力供給手段21と、制動手段18、モータ駆動手段20および電力供給手段21を制御する制御手段22とを備えている。制御手段22は、制動手段18を作動させてモータ17を停止させるとともに、制動手段18の作動中に電力供給手段21を制御してモータ駆動手段20に電力を供給しながらモータ駆動手段20を制御してモータ17への電流の供給を停止する。
(もっと読む)
加工システム及び加工方法
【課題】ワークの加工ラインの製造コストを減少させ、かつ、ワークを効率的に加工すること。
【解決手段】加工システム1において、連続搬送機構20は、ワーク2を連続搬送させる。加工機12は、ワーク2に対して所定の加工動作を行う。ロボット11は、加工機12が先端に取り付けられているアーム23と、アーム23が取り付けられるロボットベース22と、を有する。ロボット移動機構14は、ロボットベース22が取り付けられ、ロボット11を移動させる。ロボット制御装置16は、アーム23の移動制御と共に、ロボット移動機構14に対する移動制御を実行する。即ち、ロボット制御装置16は、ロボット移動機構14の移動制御として、連続搬送機構20によるワーク2の連続搬送とは独立して移動させる制御を実行する。
(もっと読む)
ワーク搬送装置
【課題】 少ない駆動源でワーク保持部材を3軸方向に移動させることができ、小さな駆動源で軽快な移動動作が可能なワーク搬送装置を提供する。
【解決手段】 X,Y,Z軸の直交座標系において、第1および第2の走行体3,4は、X軸方向のレール2に沿って走行可能である。第1の走行体3は、X軸方向の軸心およびZ軸方向の軸心の2つの軸心回りに揺動自在に第1の揺動アーム5を支持する。第2の走行体4は、Z軸方向の軸心回りに揺動自在に第2の揺動アーム6を支持する。第2の揺動アーム6の先端に、Z軸方向の軸心回りに回動自在に支持部材7を設ける。支持部材7にZ軸方向にスライド自在に支持され、かつ第1の揺動アーム5の先端にX軸方向の軸心およびZ軸方向の軸心の2つの軸心回りに回動自在に支持されたワーク保持部材8を設ける。
(もっと読む)
塗装システム
【課題】例えば、車体本体に対して揺動可能に連結されたドア等を容易に開状態とすることが可能であり、しかも、作業効率に優れる塗装システムを提供する。
【解決手段】塗装システム10は、塗装ロボット14a〜14dと、オープナーロボット16とを有する。例えば、塗装ロボット14a〜14dは、壁24、26に敷設された第1案内レール28に変位自在に係合された走行台車32を介して設けられ、一方、オープナーロボット16は、壁26に敷設された第2案内レール30に変位自在に係合された走行台車34を介して設けられる。
(もっと読む)
ロボットの動作診断方法、ロボットの制御装置、ミニエンバイロメントシステムの制御装置、ロボット、及びミニエンバイロメントシステム
【課題】ロボット動作を診断して不具合を回避することができ、かつ、異常部位の詳細表示やパネル上でのロボット動作の再現により、メンテナンス時間を短縮できるロボットの動作診断方法を提供する。
【解決手段】複数の駆動軸をそれぞれ駆動する複数のモーター、マニピュレータ、及びセンサを有し、駆動軸によりマニピュレータを移動させるロボットの動作診断方法において、少なくとも1つの駆動軸に対し、ロボットの診断対象とする動作パターンを設定し、ロボットの初期状態での動作パターンにおいて、複数回計測したモーターを制御する制御装置の複数の入出力信号と、センサまたはマニピュレータを制御する機器の複数の入出力信号とを判定データとし、新たに計測した判定データを診断データとし、統計的パターン認識方法により診断データが判定データに含まれるかを判別することにより、新たに計測した時のロボットの動作が正常であるか判定する。
(もっと読む)
ウェーハ搬送ロボット及びこれを用いたウェーハ搬送装置
【課題】ウェーハ搬送ロボット内部の配線作業が困難である配線箇所にてノイズ影響に強く、かつ配線作業効率を向上させることができるウェーハ搬送ロボット及びそれを用いたウェーハ搬送装置を提供する。
【解決手段】ウェーハを把持するアームと、そのアームを支持し内部にアームを旋回駆動させる旋回駆動モータ及びアームを伸縮駆動させる伸縮駆動モータを有するロボット本体部と、そのロボット本体部を移動させるための走行手段とを備えたウェーハ搬送ロボットにおいて、ロボット本体部の内部において旋回駆動モータの周囲を通って配線され、アームの駆動に用いられる信号を伝達するための旋回配線部は、シールド処理が施されたフレキシブルプリント基板を備えた。
(もっと読む)
1 - 20 / 98
[ Back to top ]