
Fターム[3C007EU13]の内容
マニピュレータ、ロボット (46,145) | 指部材の開閉機構 (890) | バネ付勢 (164) | 開方向付勢 (64)
Fターム[3C007EU13]に分類される特許
41 - 60 / 64
マイクロマニピュレータ
【課題】把持指開閉の微調整可能で操作性の高いマイクロマニュピュレータを提供する。
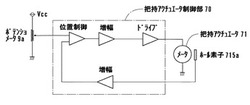
【解決手段】細胞ハンドリングシステムは、把持アクチュエータ71の駆動力により2本の把持指の先端部を近接させて細胞を把持するハンドリング部と、ハンドリング部をX、Y及びZ方向に移動させるX、Y、Z方向アクチュエータと、ポテンショメータ9aを有し、アクチュエータ71の駆動信号を入力するための第1コントローラと、X、Y、Zアクチュエータの駆動信号を入力するための第2コントローラと、ポテンショメータ9aから出力される電圧とホール素子715aから出力される電圧との差がゼロとなるようにアクチュエータ71の駆動を制御する把持アクチュエータ制御部70と、第2コントローラからの入力に応じたパルス数により、X、Y、Zアクチュエータの駆動を制御するX、Y、Zアクチュエータ制御部と、を備える。
(もっと読む)
直角プーリ駆動機構付きの手術マニピュレータ

本発明は、マニピュレータアーム(408)と、ロボットアームにより保持されたエンドエフェクタ(428)と、エンドエフェクタ(428)により保持された手術ツール(430,560,630,700)と、マニピュレータ関節とを含む手術マニピュレータ(400)を提供し、特に、コンパクトかつ軽量な手術マニピュレータを実現するため、一つの軸線から垂直な軸線へ回転運動を伝達する直角駆動装置(10)を提供する。 (もっと読む)
伸張可能指形捕捉具
【課題】容器の空洞部に挿入し要素が膨らむことにより容器を捕捉する捕捉具であり、長寿命で構成部品交換容易で、かつ大捕捉力を可能とする捕捉具を提供する。
【解決手段】基端と末端の端部を伴う支持体、前記本体中を交互に誘導されるとともに移動する空圧制御ピストン、支持体の末端部において関連してピストンに接続されるとともにこれと一緒に軸方向に移動する圧縮円盤、圧縮円盤と支持体の末端部間に組立てられるとともに、非作動と作動の位置間の圧縮円盤を伴う制御ピストンの運動に応じて収縮および伸張の位置間を移動する柔軟性捕捉具要素により構成される空圧的制御指形捕捉具。
(もっと読む)
平坦な物体を把持し搬送するためのグリッパ
平坦な物体(P)、特に新聞、雑誌、またはパンフレットなどの印刷物を保持し、かつしっかり保持した状態で搬送するためのグリッパを提供する。グリッパは、互いに対して旋回して開いた形状および閉じた形状となる2つの締付け舌(4、5)を含み、締付け舌(4、5)は、閉じた形状において互いに押付けられる。締付け舌(4,5)の少なくとも一方の遠位端は、締付け力と同じ方向に、締付け舌から横方向に延在する2本の弾性アーム(30)に嵌合し、締付けあご(10,11)は、アームの各々の自由端に配置される。少なくとも一方の締付け舌の締付けあごの接触面は、ボールジョイントによってアーム(30)上に装着されるように、締付け力の下で、向い合う締付けあごの接触面または締付けられた物体に嵌合するように適合される。グリッパは、種々の平坦な物体および厚さが異なる領域を有する平坦な物体を保持し、しっかり保持した状態で搬送するのに特に適する。 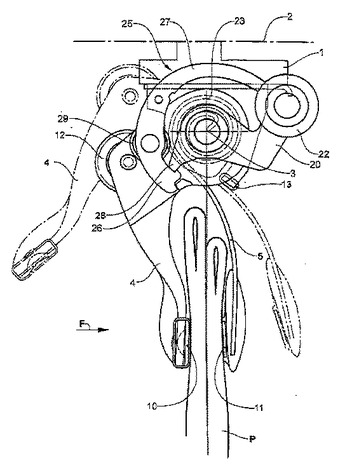 (もっと読む)
(もっと読む)
関節構造体及びロボットアーム
【課題】関節の動きに完全に影響を受けず駆動力を伝達することが可能な関節機構における関節構造体及び該関節構造体を備えるロボットアームを提供する。
【解決手段】第1駆動装置4の駆動により、第2構造体2を第1回転関節回りに回転させ、第3回転ガイドプーリー33に対する、可動回転プーリー10及び第4回転ガイドプーリー34の、第1回転関節回りの回転及び平行リンク構造による回転抑制の結果、ワイヤ7が第3・第4回転ガイドプーリー円周部にかかる量の増減が相殺され、第3回転ガイドプーリーと可動回転プーリーとの距離を不変とする。
(もっと読む)
部品搬送装置および部品搬送方法
【課題】部品表面に接触することなく、低ストレスで部品を搬送する。
【解決手段】保持アーム3がチップトレイ10に接触した後、搬送ヘッド1を下降させ、搬送ヘッド1の貫通孔2から空気を引き、吸引口2a方向へICチップ11を吸引する。そして、搬送ヘッド1が上方へと移動することにより、ICチップ11は前記吸引によりトレイポケット部10aから浮上する。保持アーム3の下アーム部3bが、浮上している状態のICチップ11の底部に入り込んで、ICチップ11を掬い上げるように保持し、搬送ユニット体8を、ICチップ11を載置する所定の位置まで搬送する。
(もっと読む)
電動アクチュエータ
【課題】変位終端位置におけるピストンの変位を確実且つ安定的に規制すると共に、装置の小型化及びその耐久性の向上を図る。
【解決手段】駆動部52からの駆動力を変速するギア機構54と、該ギア機構54によって変速された回転変位を直線変位へと変換可能な変換機構56とを備え、前記ギア機構54における複数のサテライトギア68がギアホルダ74に回転自在に支持され、前記サテライトギア68を介してギアホルダ74が回転することによりローラ104を介してカムボディ84の昇降レール92に沿って上昇・下降する。そして、ギアホルダ74に連結されたピストン58がボディ60の軸線方向に沿って変位することにより、該ピストン58の端部に係合された一組のチャック136a、136bを開閉させてワークWの把持状態を切り換える。
(もっと読む)
ロボットグリッパおよびその製造方法
ロボットマニピュレータアームに取外し可能に取り付けるための固定フランジ(1)と、フレーム(3)内で支持され、少なくとも1つの関節ユニット(2)を介して少なくとも2つのグリッパジョー(15、18)を間接または直接的な運動の形で作動させる少なくとも1つのアクチュエータ要素(5)とを備えるロボットグリッパが記載する。本発明は、少なくとも固定フランジ、フレーム、およびアクチュエータ要素が一体に、積層造形法を使用して製造されること、ならびにアクチュエータ要素が、蛇腹状に形成されており、少なくとも1つの開口部を介して媒体を満たすことができる内部ボリューム(6)を含んでおり、このボリュームは、媒体を満たすと、アクチュエータ要素の蛇腹状の形成によって規定されるリニア軸(A、B)に沿って拡張させることができ、ボリュームを空にすると、リニア軸に沿って逆方向に収縮させることができることを特色とする。 (もっと読む)
ハンドリング治具
【課題】 筒状の搬送対象物を素手で触れることなく、容易にクランプでき、かつ、搬送し易いハンドリング治具を提供する。
【解決手段】 ハンドリング治具10は、実質的に左右対称な第1、第2のクランプアーム11、12を有し、中央で回動自在に連結された本体フレーム13と、第1、第2のクランプアーム11、12の下端部にそれぞれ取付けられて、筒状の搬送対象物14を内側から押圧する第1、第2の押圧部材15、16と、第1、第2のクランプアーム11、12の上半分の中間位置に跨がって配置され、第1、第2の押圧部材15、16が搬送対象物14を内側から押圧したことを維持するクランプ機構17と、第1、第2のクランプアーム11、12の上部に取付けられた把手18とを有する。
(もっと読む)
チャック装置
【課題】チャック爪が把持動作を行うチャック動作時のダミーピンとチャックとのカジリ発生を防止して、チャック動作を繰り返し確実で滑らかに行うことができるチャック装置を提供すること。
【解決手段】チャック本体1にチャック爪2が軸方向に移動可能に支持され、チャック爪2の軸方向移動に連動して縮径および拡径を行いチャック爪2の先端部にワークWを把持および解放するチャック装置であって、チャック爪2がワークWを把持する際に、チャック爪2の根元で把持可能なダミーピン4をチャック本体1に上下に移動可能に支持した。
(もっと読む)
ワーク移送装置
【課題】 従来のワーク移送装置は、ワークを把持するためのチャック爪をワークの寸法に応じて用意する必要があり、そのための段取り替え時間も掛かる。
【解決手段】 本発明によるワーク移送装置は、第1の方向に沿って往復動自在に下板11に取り付けられた昇降テーブル14と、この昇降テーブル14を下板11に対し第1の方向に沿って駆動するテーブル駆動手段と、第1の方向と交差する第2の方向に沿って往復動自在に昇降テーブル14に取り付けられたヘッドプレート28と、このヘッドプレート28を昇降テーブル14に対し第2の方向に沿って駆動する旋回駆動モータ21と、ワークを挟持し得るようにそれぞれ往復動自在にヘッドプレート28に取り付けられ、ワークの寸法に応じて対向間隔がそれぞれ異なる複数組の把持面33aを有する一対のチャック爪33と、この一対のチャック爪33をこれらの対向方向に開閉駆動する把持部材駆動手段とを具える。
(もっと読む)
把持装置
【課題】微小部品を把持するのに適した把持装置を提供する。
【解決手段】フィンガー部101の先端が閉じた状態(a)において、回転部材230を一方方向に回転させると、回転部材230の回転に伴い円弧を描くように移動する回転ベアリング422,423によって、フィンガー部101の屈曲部335が内側に向かって押される。圧縮ばね501の付勢力に逆らって、回転部材230をそのまま回転をさせていくと、フィンガー部101の後端は閉じていき、フィンガー部101の先端は開いていく。一方、フィンガー部101の先端が開いている状態(b)において、回転部材230を他方方向に回転させると、回転部材230の回転に伴い円弧を描くように移動する回転ベアリング422,423に追従して、フィンガー部101の屈曲部335が外側に向かって移動する。回転部材230をそのまま回転させていくと、フィンガー部101の後端は開いていき、フィンガー部101の先端は閉じていく。
(もっと読む)
把持装置
【課題】 本発明は、小型で、耐久性および位置決め精度がよく、数種類の長尺円柱状ワークが把持できる把持装置を提供することを目的とする。
【解決手段】 下方が開放された円筒状のボディ1と、内周面にテーパ面が形成された円筒状のスライダ2と、スライダのテーパ面に契合する逆テーパ面を有する複数の爪部材5を同心円状に配置するとともに、複数の爪部材が離反する方向に負荷のかかるスプリング6,7を配置し、独立した複数の爪部材が長尺円柱状ワーク9をボディ内部の中空部で把持する。
(もっと読む)
チャッキング装置
【課題】小型の駆動部で十分大きなワークを挟持することができるコンパクトな構造のチャッキング装置を提供する。
【解決手段】上下方向へ並設された一対のアーム1A,1Bと、アーム1A,1Bの中間位置を軸体223で回動可能に支持する支持部材2と、アーム1A,1Bの上端間へ進退可能に設けられ、アーム上端間に進入した際にその間隔を拡げることによりアーム1A,1B下端を互いに接近する方向へ移動させて、当該アーム1A,1B下端の挟持片11間にワーク(W)を挟持させる操作片33とこれを駆動する油圧シリンダ31とを具備している。
(もっと読む)
ロボットハンド
本発明は、製品積載用ロボットハンドに関する。本発明の製品積載用ロボットハンドは、複数の製品を一度に積載する。ロボットハンドは、水平に並んで離隔して配列された複数のグリッパーと、これら複数の各グリッパーの上部に結合されて各グリッパーを固定する複数の移動フレームと、これら複数の移動フレームを貫通して固定するガイドロッドと、複数の移動フレームの両側に設けられた一対のガイドウイングと、これら一対のガイドウイングを互いに連結させ、長さ調節可能なシリンダロッドとを具備する。 (もっと読む)
把持装置
【課題】 ボトルの先端部を保持することができ、かつ、コンパクトなボトルの把持装置を提供する。
【解決手段】 中心軸5と、中心軸5に取り付けられた内筒3と、内筒3の外周部分に取り付けられ開閉自在な3本以上の指部材2と、指部材2を開方向に付勢して開状態を保持する開保持手段23と、指部材2に対し移動することで、指部材2を閉方向に付勢する外筒4とを備え、各指部材2の内周面には、各々、周方向に互いに分割されオネジ部B1に嵌り込む分割メネジ21が形成され、内筒3が中心軸5の軸方向Zの双方向に移動自在に取り付けられていることで、指部材2が閉方向に閉じる際に指部材2が軸方向Zに移動して分割メネジ21がオネジ部B1に嵌り込むのを可能としたことを特徴とする。
(もっと読む)
イチゴ挟着具及びそれを用いたイチゴ自動収容装置
【課題】 更にイチゴの損傷を減少でき、より簡単な構造で、修理や点検等も容易なイチゴ挟着具及びイチゴ自動収容装置を提供する。
【解決手段】 開閉式の二つの挟着片でイチゴの蔓を挟着把持してそのイチゴを容器へ収容し、収容後に挟着を開放するイチゴ挟着具200において、二つの挟着片にイチゴの蔓を挟着する蔓挟着部220と、イチゴの上部(肩部)を支持してイチゴを容器へ収容するのに適した姿勢に保持する肩支持部221を有する。イチゴ挟着具の二つの挟着片を開閉操作して二つの挟着片の蔓挟着部でイチゴの蔓を開閉操作すると共に肩支持部をも開閉操作する操作部を備えた。このイチゴ挟着具を、往復移動手段によりイチゴ供給部側と容器側とにイチゴ挟着具を往復移動させて、イチゴを容器に自動的に整列収容するイチゴ収容装置に備えた。
(もっと読む)
バイアル瓶搬送装置およびそのアーム
【課題】 簡単な構成でバイアル瓶を搬送することができるバイアル瓶搬送装置を提供する。
【解決手段】
バイアル瓶2を保持し解放するように開閉可能な少なくとも2つのアーム26と、バイアル瓶2を保持する方向にアーム26を付勢する付勢部材31と、バイアル瓶2の搬送方向と平行に往復移動してアーム26を開閉する枠体27と、アーム26がバイアル瓶2を解放する状態に枠体27を停止する枠体ストッパ26aと、アーム26をバイアル瓶2の受取り位置と受渡し位置に移動させるアーム移動装置18,19と、アーム26が受取り位置に移動したときに枠体27に突き当たって枠体27を枠体ストッパ26aから解除し、アーム26でバイアル瓶2を保持する第1突当部材2と、アーム26が受渡し位置に移動したときに、枠体27に突き当たって枠体27を枠体ストッパ26aに係合し、アーム26をバイアル瓶2から解放する第2突当部材29とから構成されている。
(もっと読む)
材料及びその用途
【課題】電気メッキされたCoPtP材料は垂直磁気特性を高め、超小型電気機械システム(MEMS)デバイスの使用において有益である。
【解決手段】94−98重量%のCo,0−1重量%のPt及び2−4重量%のPの組成を有するコバルト(Co),プラチナ(Pt)及びリン(P)から構成される材料。材料はセ氏100乃至500度の温度でアニーリングされる。材料は適当な電気化学浴中で基板を電気メッキすることにより形成される。電気メッキされたCoPtP材料は基板に層を形成する。
(もっと読む)
ロボットハンド装置
【課題】 本発明では、スペース効率を向上させることができるとともに、小指から順に折り曲げていくというような人間らしい把持動作を行うことができるロボットハンド装置を提供することを目的とする。
【解決手段】 ロボットハンド装置1は、基部10から延設される4本の指機構20と、各指機構20を作動させる1つのモータ30と、を備えている。さらに、このロボットハンド装置1には、各指機構20を作動させるために各指機構20に連結される4つの回動ローラ50と、各回動ローラ50に対してモータ30からの動力を異なるタイミングで伝達するように構成される動力伝達機構60と、が設けられている。
(もっと読む)
41 - 60 / 64
[ Back to top ]