
Fターム[3C007FS01]の内容
マニピュレータ、ロボット (46,145) | 吸着装置単体の形態 (580) | 真空吸着 (505)
Fターム[3C007FS01]の下位に属するFターム
真空源を有さないもの (9)
エゼクタ (13)
ベルヌイチャック (77)
Fターム[3C007FS01]に分類される特許
201 - 220 / 406
把持装置
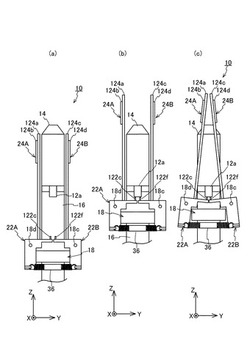
【課題】複雑な制御を行うことなく、収穫対象果実を把持可能なハンド機構を提供する。
【解決手段】収穫対象のイチゴの−Z側に位置決めされるガイド16と、ガイド16に設けられ、Z軸に沿ってスライド移動するスライダ18と、スライダ18に設けられ、スライダ18の+Z方向への移動に伴って、ガイド16と一体的に構成されたストッパ12aと接触することにより、X軸回りに回転する第1回転部22Aと、第1回転部22Aにその下端部が固定され、第1回転部22Aの回転によりその上端部がイチゴに近づく方向に移動する第1フィンガー部24Aと、第1フィンガー部24Aの上端部とともに、収穫対象のイチゴを把持する第2フィンガー部24Bと、を備えている。
(もっと読む)
半導体試験装置及び該装置における半導体デバイスの品種切替方法

【課題】低温環境下での半導体デバイスの試験における該デバイスの品種切替作業時間を短縮させることができる試験装置及び品種切替方法を提供することにある。
【解決手段】外部装置に電気接続されるソケットユニット110と、半導体デバイス107を取り上げるコレットユニット130と、コレットユニットをソケットユニットに組み合わせて押圧することにより、コレットユニットにより取り上げられた半導体デバイスをソケットユニットに電気接続するチャックユニット150と、チャックユニットの軸方向の移動動作及び軸回りの回転動作のみにより、チャックユニットとコレットユニットの着脱が可能な着脱機構136、153を備える。これにより、半導体デバイスの品種を切り替えるときに、切替品種に対応するチャックユニットとコレットユニットとを自動的に着脱させて交換することができ、デバイスの品種切替作業時間を短縮させることができる。
(もっと読む)
ワーク吸着ヘッド
【課題】パレット上に既に載置された他のワークに影響を与えずに、小型軽量のワークをパレット上に正しく載置するワーク吸着ヘッドを提供する。
【解決手段】ワーク吸着ヘッド23は、内管31、外管32、飛散防止カバー33などからなる多重構造となっており、内管31と外管32との間に形作られる隙間41と、外管32の側面に設けられたエアー排出路43が構成される。飛散防止カバー33は、吸着したレンズ11をパレット12bに載置するときにバネ34によってパレット12bに押し当てられ、吸着されたレンズ11をノズル部27から離脱するときに吸着口39から吐出されるエアー48を閉じ込める。飛散防止カバー33によって閉じ込められたエアー48は、パレット12bに既に載置された他のレンズ11に影響を与えないようにエアー排出路43を通して排出される。
(もっと読む)
非接触搬送装置
【課題】 搬送中に保持ハンドからワークWが脱落することを防止しつつ、搬送中におけるワークWの損傷の発生を十分に抑制することができる非接触搬送装置を提供する。
【解決手段】ハンド本体7の保持面9にベルヌーイチャック11が設けられ、ベルヌーイチャック11が作動流体供給源15に接続した噴出孔13を有し、ハンド本体7の保持面9にワークWの周辺部を吸着する複数の吸着ピン19が設けられ、各エアを吸込み可能かつエアを吸引するエア吸引源23に接続した吸込孔21をそれぞれ有し、上方向から非接触で保持されたワークWに作用する圧力とワークWの重量がつりあう所定の均衡状態におけるハンド本体7の保持面9とワークWの表面とのクリアランスL分だけハンド本体7の保持面9に対してそれぞれ突出するようになっていること。
(もっと読む)
産業用ロボットの線条体処理構造
【課題】本発明は、作業ツール及び手首が複雑な動きをした場合であっても、手首に配索される線条体の挙動を安定させることができ、線条体の接続信頼性を高めることができる産業用ロボットの線条体処理構造を提供する。
【解決手段】電磁弁ボックス12を有する前腕7と、一端に前腕7が回動自在に連結され、他端にハンド15を有する手首8〜9とを備え、ハンド15に接続するハンドケーブル20が、電磁弁ボックス12を経由して、手首8〜9に沿って配索されている産業用ロボットの線条体処理構造において、ハンドケーブル20を通す導管13が、前腕7側からハンド15側にかけて手首8〜9の内部に設けられ、導管13の一端がハンド15側で固定され、導管13の他端が前腕7内部で導管13の長手方向に摺動可能に挿入されている。
(もっと読む)
移送装置および吸着盤
【課題】
軽量で、コンパクトで、経済性が優れ、若干の移送対象物のそりなどの変形を容易に吸収でき、短時間に吸着を完了し、移送タクトタイムを大幅に短縮可能な移送装置を提供する。
【解決手段】
(1)支持板2と、(2)支持板2の下面に設けられ、移送対象物7に当接され、略平行して延びている2つの封止部材3と、(3)2つの封止部材の間に設けられている吸引孔と、(4)支持板2と2つの封止部材3と移送対象物7とによって囲まれる空間内を吸引する吸引手段(図示せず)と、を備える移送装置。
(もっと読む)
基板検査装置
【課題】真空吸着状態が切れても基板の健全性を維持し、検査時に発見した基板の裏面の汚れ等をクリーニングすることを可能にする。
【解決手段】基板Aの少なくとも裏面の目視検査を行うための基板検査装置1であって、基板Aの裏面を真空吸着する吸着保持部6と、該吸着保持部6により吸着された状態の基板Aの外周縁に接触して半径方向に挟む複数の接触部10を有する押圧保持部8とを備える基板検査装置1を提供する。
(もっと読む)
吸着装置
【課題】最適な吸着タイミングを得て吸着に要する時間を短縮する。
【解決手段】負圧をかける吸引路7に連通するノズル部5とこのノズル部5に連通して下方に開口するノズル室9を設けた本体3と、前記ノズル室9の内部に装着した外筒11であって、この外筒11の内部に下方に向けて細くなる第1テーパ面13とその下部に雌ネジ部15を設けた外筒11と、この外筒11の内部に挿入した内筒19であって、この内筒19の外周面に前記第1テーパ面13に嵌合して当接する第2テーパ面21とその下部に外筒11の雌ネジ部15に螺合して雄ネジ部15を設け、かつ内部にノズル部5に連通する吸引室23とその下部にボール受部25を設け、かつ上端から下方に向けて複数割りの切込み部29を設けた内筒19と、前記吸引室23の中で前記ノズル部5とボール受部25との間を移動可能に収容されてノズル部5を閉塞可能な球体35と、で構成されている。
(もっと読む)
ピッチ変換搬送装置
【課題】複数個のワークを一列状に整列させ、列ごとにピッチ変換して移載する際に、複数の異なるピッチ変換によってワークを移載することを可能とし、製品切り換えによる切り換え作業を容易にし、ピッチ変換搬送装置の製作コストを削減する。
【解決手段】ワークの配置ピッチが異なる少なくとも2つの搬送位置間で、ワークを一列に整列させて移載するピッチ変換搬送装置であって、板体の一端辺側から他端辺側に向けて連通し、前記一端辺から他端辺の任意の位置における溝配置ピッチを異なる配置として複数のガイド溝62が形成された板カム60と、前記各々のガイド溝62に沿って移動自在にガイド溝62に係合して装着された、ワーク支持用のアタッチメント78と、前記板カム60と前記アタッチメント78を、前記板カム60の一端辺から他端辺に向かう方向に平行なカム動作方向に、相対的に移動させる移動機構とを備えている。
(もっと読む)
真空ピンセットおよびこれを用いた基板搬送装置ならびに基板処理装置
【課題】 反った基板を出し入れしたり温度変化により基板が形状変化したりすると真空ピンセットの吸着面が基板を傷つけたり、基板の脱着時に汚れを付着したりして、基板から形成される半導体素子等の歩留まりや信頼性を低下させていた。
【解決手段】 板状体7の先端側が二股状に分岐し、板状体7の先端部および分岐部の各表面の少なくとも3カ所に基板8を吸着する吸着部3を備えるとともに、吸着部3と連通する吸引路4を内設してなる真空ピンセット1において、吸着部3は外側面が吸着面3aに向かって狭まっており、吸着面3aの輪郭が曲線であるものとする。吸着面3aと基板8との接触面積を減少させられるので、基板8を汚染しにくくなる。併せて、吸着面3aの輪郭が曲線であることから、基板8と接触したとしても線接触にならず点接触となるため、基板8を傷つけるおそれを少なくすることができる。
(もっと読む)
吸着板およびそれを用いたセラミックグリーンシートの搬送装置
【課題】大きな面積を有する場合であっても高精度にかつ安価に製造することができ、しかも、簡単な構造により吸着板の平坦性を確実に維持することができると同時に、吸着板の吸着面に略均質な吸引力を発生させることができる吸着板を提供する。
【解決手段】金属製の平板体3を少なくとも2枚積層して成る積層体13と、この積層体13の上面側に予め定められた間隔を保ちながら配設される複数のスペーサー6とを有し、平板体3は、一定のピッチを保ちながら形成される複数の貫通孔4を備え、平板体に形成される複数の貫通孔4は、他の平板体に形成される複数の貫通孔4と連通し、積層体13の上面17とスペーサー6の下端6aとは略線状に接触することを特徴とする吸着板2aによる。
(もっと読む)
ウエーハの搬送機構
【課題】デバイス領域の厚さを所定厚さに形成され外周部に環状の補強部が形成されたウエーハを破損させることなく、また研削されたデバイス領域に対応する裏面に傷を付けることなく吸引保持して搬送することができるウエーハの搬送機構を提供する。
【解決手段】ウエーハの裏面における外周余剰領域が残存されて環状の補強部が形成された第1の形態と、デバイス領域に対応する領域の裏面と僅かな段差(h)をもって形成された第2の形態を有するウエーハを吸引保持して搬送するウエーハの搬送機構であって、環状の補強部のみを吸引保持する環状の第1の吸引面を備えた第1の吸引保持部921と、デバイス領域に対応する領域のみを吸引保持する第2の吸引面を備えた第2の吸引保持部923とを有する保持パッド92を具備し、第2の吸引保持部の第2の吸引面は第1の吸引保持部の第1の吸引面と僅かな段差(X)をもって突出して形成されている。
(もっと読む)
保持具
【課題】吸着したワークを落下し難くした保持具を提供することを課題とする。
【解決手段】吸着パッド10は、油を収容しているシリンダ12と、シリンダ12内を下室30と上室32とに分けるピストン16と、を備えている。下室30はワーク吸着側である。また、吸着パッド10は、ピストン16が取付られるとともにシリンダ12を貫通するピストンロッド18と、下室30を狭める方向にピストン16を付勢するコイルバネ22と、を備えている。また、ピストン16とシリンダ内壁面12Sとによって、上室32と下室30とに連通しオーリング34が収容される中間室38が形成されている。ピストン16には、上室32と中間室38とに連通し中間室38から上室32へ流れる際の油の流動がオーリング34によって妨げられる上室側環流孔42と、上室32と中間室38とに連通するオリフィス50と、形成されている。
(もっと読む)
吸着ノズルおよび表面実装機
【課題】内部に異物が付着し難く、清掃作業の頻度を減らすことができる吸着ノズルおよよび表面実装機を提供する。
【解決手段】部品吸着面49と空気通路とが形成されたノズル本体22と、ノズル本体22嵌合用の嵌合孔26を有し吸着ヘッド3に取付けられるノズルホルダ21とを備える。ノズル本体22の係合溝48に係合してノズル本体22の移動量を所定量に規制するピン23と、ノズル本体22を付勢する圧縮コイルばね25とを備える。前記圧縮コイルばね25を、ノズル本体22の外側でノズル本体22とノズルホルダ21との間に弾装する。前記係合溝48を、ノズル本体22における空気通路47の外側に形成する。前記ピン23を、係合溝48に係合しかつノズルホルダ21とノズル本体22との嵌合部を横切るようにノズルホルダ21に支持させた。
(もっと読む)
基板搬送装置
【課題】基板の予備位置決め機構を搬入ステージ、露光ステージに設置することなく、露光ステージに搬送する前に基板の予備位置決めを行うことができ、ピンの設置位置の調整も簡単な基板搬送装置を提供することを課題とする。
【解決手段】前記搬入ステージ30上の基板Wの端面を押動して予備位置決めを行う予備位置決め機構2と、この予備位置決め機構を支持本体12により支持すると共に、予備位置決めされた基板を吸着して保持し前記露光ステージ40に搬送する搬送機構20とを備え、前記予備位置決め機構は、前記支持本体に支持された駆動手段6と、この駆動手段により駆動して前記基板の端面を押動する押動手段2とを有し、前記駆動手段は、円筒形の磁気軸体7と、この磁気軸体を軸周りに回動させる回動手段8と、この回動手段により回動する磁気軸体の周面に対面させて設けた直線状の第1長尺磁気体9Aおよび第2長尺磁気体9Bと、を有する構成とした。
(もっと読む)
半導体装置の製造方法
【課題】支持部材上に剥離可能に設けられた厚みの薄い半導体チップを損傷させずに吸着して持ち上げる。
【解決手段】吸着手段20を、ホルダー部21と、ポーラス部22と、コレット部23とから構成し、ホルダー部21に設けたポーラス部22に、コレット部23を設けるようにする。かかるコレット部23に吸着孔24を設けて、吸着孔24で吸着する。コレット部23を設けるに際しては、脱着自在に設けることで、コレット部23のみを交換して半導体チップ11の種々の形状、大きさに合わせることができる。特に、吸着孔の設定に際しては、半導体チップの吸着度を変化させた対応も可能である。
(もっと読む)
真空を用いたノンコンタクト搬送システム
【課題】保持力の大きいノンコンタクト搬送システムを提供すること。
【解決手段】負圧吸引によりワーク9を保持するとともに、ワーク9との非接触を確保するために、ロードセル3または近接センサ2などのセンサ信号をもとに、ワーク9と吸引パッド1間の距離制御を行い、非接触の吊上げ搬送を実現する。
(もっと読む)
基板ハンドリング装置、基板搭載方法、基板取出方法
【課題】基板搬送装置への基板の搭載および取り外しを自動化することのできる基板ハンドリング装置、基板搭載方法、基板取り出し方法を提供する。
【解決手段】ロボットアームの先端に取り付けられる基板ハンドリング装置であって、ロボットアームに取り付けられた板状保持部材と、板状保持部材に基板保持方向に突出可能に軸支され、先端に基板吸着パッド部15を備えた基板保持アーム16と、基板保持アーム16を板状保持部材から突出しない状態で固定するロック機構と、基板吸着パッド部15を基板保持アーム16から突出する方向に付勢する突出機構18と、基板吸着パッド部15の基板保持アーム16からの突出を制限する吸着パッド部24とを備えた。
(もっと読む)
薄厚ウエハ搬送用吸着ハンド
【課題】薄厚ウエハ吸着時に薄厚ウエハは内周部が先に吸引されて外周部がたれ下がり反ったり曲がったりすることのない薄厚ウエハ搬送用吸着ハンドを提供。
【解決手段】薄厚ウエハ搬送用吸着ハンド 1の吸着面11には、第1連通路12と連通する複数の幅広の外周吸着空気室周溝13、131〜136 と第2連通路14と連通する複数の幅狭の内周吸着空気室周溝15、151〜155 とが設けられ、第1連通路12は広い断面積を持つ第1絞り21を介して高い真空度の真空ポンプHVP30又は低圧空圧ポンプLP40に選択的に接続され、第2連通路14は狭い断面積を持つ第2絞り22を介して低い真空度の真空ポンプLVP31に又は前記低圧空圧ポンプLP40選択的に接続され、薄厚ウエハ 2を吸着面11に吸着し、所定位置に移載又は搬送し、高い真空度の真空及び低い真空度の真空を破壊し、かつ低圧空圧ポンプLP40を作動させて薄厚ウエハ 2を前記所定位置に載置するようにした。
(もっと読む)
薄厚ウエハの搬送方法
【課題】ウエハ搬送吸着ハンドの吸着面を真空作動させ直接に吸着面にウエハを吸着保持させることがなく、吸着面に接触するウエハの部分が一点となることがなく、抗折力の限界を超えてウエハの割れが発生することがない薄厚ウエハ搬送方法を提供。
【解決手段】テーブル19に薄厚ウエハ 2の一面20をポーラスセラミック吸着板17上に吸着保持し、薄厚ウエハ 2の上面20に薄厚ウエハ搬送吸着ハンド 1の吸着面11を近接して位置決めし、流体連通室18と連通路39を電磁切替弁52を介して真空破壊通路55と選択的に連通させて真空破壊を行い、さらに流体連通室18と連通路39を電磁切替弁54を介して水とエアの混合流体供給源57と選択的に連通させて薄厚ウエハ 2の他面28に均一に水とエアの混合流体を導き薄厚ウエハ 2をわずかに浮かせ(テーブル19上面と吸着面11の距離Dは数mmである)、次に浮いた薄厚ウエハ 2を吸着面11に吸着するようにした。
(もっと読む)
201 - 220 / 406
[ Back to top ]