
Fターム[3C007HT20]の内容
マニピュレータ、ロボット (46,145) | 伝動装置(挟持装置は除く) (1,840) | ネジ移動 (226) | ボールネジ (168)
Fターム[3C007HT20]に分類される特許
81 - 100 / 168
マニピュレータ、マニピュレータシステム、マニピュレータ用画像表示装置及びマニピュレーションシステム
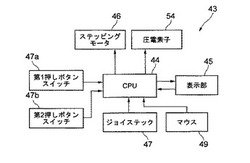
【課題】細胞等の微小微小対象物に対しキャピラリによるインジェクション操作を行う際に、かかる操作のための動作を確実に精度よく繰り返して行うことが可能なマニピュレータ及びマニピュレータシステムを提供する。
【解決手段】このマニピュレータは、ナノポジショナの構造を有し、キャピラリの微動動作を行うことで微小対象物に対するインジェクションが可能であって、キャピラリの動作を制御する制御部43と、制御部に対しキャピラリの動作を指示するために操作者により操作される操作部47,49と、を備え、操作部が、その指示の少なくとも一部を押されることで実行するボタン操作部47a,47bを有し、ボタン操作部を押すことで、キャピラリによるインジェクション操作の少なくとも一部の動作が行われる。
(もっと読む)
ハンドリング装置

【課題】狭い作業領域で効率よくワークを搬送できるハンドリング装置を提供する。
【解決手段】水平方向に伸長するガイドレール11、ガイドレールに沿って移動する可動キャリッジ20、可動キャリッジに設けられてワークを取り扱うハンドリングロボットRを備え、ハンドリングロボットRは、可動キャリッジに対して上下方向に伸縮自在に設けられたテレスコアーム30、テレスコアームに保持されると共に水平面内で旋回して伸縮又は屈曲動作を行うべく互いに連結された複数の旋回アーム40,50、複数の旋回アームの最も先端側に設けられたハンドユニット60を含む。これによれば、複数の旋回アームが水平面内で二次元的に移動するものであるため、上下方向の剛性が高く、質量の大きいワークでも停止時に振動やブレ等の発生を防止でき、狭い作動範囲において、安定したハンドリング操作を行える。
(もっと読む)
力覚呈示コントローラ
【課題】 力覚呈示機構を持つコントローラは、遠隔医療やバーチャルリアリティーの分野などにおいて臨場感のある操縦を可能にする。しかし、アクティブ型の力覚呈示機構を用いた場合、力覚呈示機構の暴走による操縦者の負傷の危険がある。また、粘性流体などを用いるパッシブ型の力覚呈示機構においても、操縦対象の微小な動作に対して敏感な力覚呈示を行うことは難しい。
【解決手段】 本発明は、かかる実情に鑑み、力覚呈示機構にER流体やMR流体などの粘性流体を用いることで、操縦者にとって安全なコントローラを実現した。そして、力覚を操縦者に伝達する機構に、操縦者が力を加える方向に垂直に取り付けられた円盤や、羽根状のものなど円盤回転方向からの抵抗を受けやすくしたものを用いることで、力覚を受け取る側の部品の動きを強く制御し、敏感な力覚呈示を可能にした。
(もっと読む)
ロボットアクチュエータにおけるスライダ構造
【課題】軽量で、かつ剛性の向上を図り、潤滑油の外部漏れを防止できるロボットアクチュエータにおけるスライダ構造を提供する。
【解決手段】スライダ5を、駆動機構によって往復動操作されるスライダ本体17と、該スライダ本体17に装着され、移動方向の前後および中間部に、上記帯状のシート10に対する摺動部を有する摺動部材16と、この摺動部材16の上面に該摺動部材を覆うように装着されたカバー部材とで構成し、上記摺動部材を、互いに対向する一対のローラーホルダ19と、このローラーホルダ19の前後端部に、ローラーホルダ19相互間に設けられたシャフト201,202に装着された弾性ローラ23と、上記ローラーホルダ19の中間部に、上記ローラーホルダ19相互間に支持された摺動部21とで構成し、上記帯状のシート10を上記ローラーホルダ19の中間部の摺動部21の上面を通し、前後の弾性ローラ23の下面を通して配設した。
(もっと読む)
搬送装置
【課題】偏荷重やモーメント荷重の影響を低減し、安定した昇降動作を実現可能な搬送装置を提供する。
【解決手段】本発明に係る搬送装置A1は、固定ベース1と、昇降ベース2と、昇降ベース2を昇降させる昇降機構3と、昇降ベース2に搭載された旋回ベース4と、旋回ベース4を鉛直状の旋回軸Os周りに旋回させる旋回機構5と、旋回ベース4に支持された直線移動機構6と、直線移動機構6の作動によりワークを水平直線状の移動行程に沿って搬送するハンド7A,7Bとを備える。昇降機構3は、固定ベース1に設けられたガイドレール311、および、昇降ベース2に設けられたガイド部材312からなるスライドガイド機構31と、固定ベース1に配置されたネジ軸321、および、昇降ベース2に設けられたナット部材322を備えたネジ送り機構32と、を備えて構成される。ネジ送り機構32は、旋回軸Osを挟んで対向状に2つ設けられている。
(もっと読む)
直線移動装置
【課題】ベースから移動体への電気配線及び/又はエア配管と、移動体等との干渉を効果的に防止しながらも、そのための構成を安価に済ませる。
【解決手段】Y軸移動ユニット12は、Y軸方向に延びるベース15に沿って移動体を自在に移動させる。ベース15側から移動体側に対する電力、エア供給のための電気配線及びエア配管を、フレキシブルなフラットケーブル21として構成する。フラットケーブル21は、ベース15の上面部を移動体の移動方向に沿って延び、中間部がUターンされるように上方に折り返されて移動体側に接続される。ベース15の上面部に、フラットケーブル21を収容可能な凹溝状の固定ガイド24を設ける。移動体に、フラットケーブル21が横方向にずれた際に、移動体の移動に伴いそのずれた部分を固定ガイド24内に押し込む(落とし込む)一対の可動ガイド部材25を設ける。
(もっと読む)
ロボットハンド
【課題】小型化および低コスト化を可能とするロボットハンドを提供する。
【解決手段】ロボットハンド1は、ベース2と、フィンガー6〜8と、それぞれ同構成からなる一軸スライダー3〜5とを備える。そして、一軸スライダー3は、位置制御部31と、従動支持部322とを備えている。位置制御部31は、一方向に延伸するレール311と、レール311に沿って移動可能にレール311に支持される移動部312と、レール311における移動部312の位置を制御する駆動部313とを有する位置制御部31とを有し、従動支持部322は、移動部312に従動し、フィンガー6が取り付けられ、フィンガー6を支持する。
(もっと読む)
ロボット
【課題】作動軸の中空部に接続部材が挿通する構造を採りながら、クリーンルームでも使用可能なロボットを提供する。
【解決手段】中空な作動軸5と、この作動軸5を回動と軸線方向への移動とのうち少なくともいずれか一方が可能となるように支持する揺動式アーム4と、アームを支持する基台2とを備える。作動軸5の中空部に、空気配管、電力供給用あるいは通信用のケーブルのうち少なくとも一つからなる配管等104を挿通する。この配管等104における作動軸5から導出された部位にコイル状の弾性変形可能な余裕部111,112を形成する。この余裕部の一端部を作動軸5に支持させ、他端部をアーム4に支持させる。アーム4に作動軸5と余裕部111,112とを覆うカバー9を備えさせる。このカバー9の内部を基台2まで延びる通路に連通させ、この通路に配管等104を通して基台2に導いた。
(もっと読む)
ロボット
【課題】作動軸を貫通する配管等が作動軸の軸線方向への移動により損傷するようなことがなく、設置スペースが相対的に狭いロボットを提供する。
【解決手段】作業部材用取付座が一端部に設けられた作動軸5と、この作動軸5を軸線方向に移動自在に支持する揺動式アーム4とを備える。作動軸5の軸心部に、接続部材(配管等104)を通す中空部が形成される。アーム4に、作動軸5に沿うように柱状部材(支柱62,63)を立設する。接続部材を、所定本の空気配管、所定本の電力供給用ケーブルあるいは所定本の信号用ケーブルのうち少なくとも一つによって構成する。接続部材における作動軸5から導出された部位を、コイル状に形成し、柱状部材に貫通させて保持させる。このコイル状部分145,146を所定の曲げ弾性を有するように形成する。このコイル状部分145,146における柱状部材の一端部をアーム4に支持させ、他端部を作動軸5に接続した。
(もっと読む)
昇降位置確認手段を有する基板搬送装置及びそれを備えた半導体製造装置
【課題】半導体製造装置で基板を搬送する基板搬送装置において、昇降する可動子が目的の位置に到達したことを確実に確認できる構成を提供し、それにより基板の破損を防止できるようにする。
【解決手段】アームとハンドを搭載した可動子5を上下に昇降させる昇降部において、装置の起動時に、搬送装置の制御装置で、インクリメンタル式のリニアスケール8のフィードバック値LnrFb0を、絶対値式エンコーダ16から得られるフィードバック値MtrFb0のリニアスケール換算値MtrFb0'と同じになるよう記憶しなおし、所定のときにフィードバック値MtrFbのリニアスケール換算値MtrFb'とフィードバック値LnrFbとを比較する基板搬送装置とした。
(もっと読む)
ロボット
【課題】把持部を上下動させるための機構を構成する部材のアームからの突出長さを短縮する。
【解決手段】把持部を配設する昇降部材5を、テレスコープ状の直線移動支持機構9の第2の単位可動部材15の下端部寄りに取り付ける。また、昇降用モータ19の回転を直線移動支持機構9の第1,第2の単位可動部材14,15を直線移動に変換させるための機構をラック・ピニオン機構20とし、そのピニオン22とラック23との接触伝導部分をアーム4の下端寄りに位置させる。
(もっと読む)
ワーク把持装置
【課題】 アウタ部材を寝かせた状態でアウタ部材上にインナ部材をセットしてサブアッセンブリしたワークを、アウタ部材とインナ部材との相互の位置ずれやアウタ部材の外表面の傷付きを生ずることなく、ヘミング装置に投入できるようにしたワーク把持装置を提供する。
【解決手段】 アウタ部材(WRO、WLO)を寝かせた状態で該アウタ部材上にインナ部材(WR1、WL1)をセットしてサブアッセンブリしたワークを、該アウタ部材の周囲の曲げ起こされた曲げ縁部をヘミング加工してアウタ部材とインナ部材とを一体化するヘミング装置に投入するためのワーク把持装置において、サブアッセンブリしたワークのうち、前記アウタ部材の周囲複数の辺(WOa、WOc、WOd)の曲げ起こされた曲げ縁部(WOe)を、開閉される1対の把持爪(82b、82c)で該曲げ縁部(WOe)の内外の両側から把持して、サブアッセンブリしたワークを投入するようにした。
(もっと読む)
低侵襲手術ロボット
【目的】手術器具挿入点に沿って回転運動、また直動運動を行なう機構を備えた低侵襲手術ロボットを提供することを目的とする。
【構成】ベースと、このベースに装着された回転駆動アクチュエータと、マニピュレータ等の各種エンドエフェクタを装着するホルダと、前記駆動アクチュエータと複数のリンクを回転対偶により連結した2組のアーム、から構成される機構不動点を備える。
(もっと読む)
ロボット
【課題】作業ユニットに対する配線作業をより容易化する。
【解決手段】本発明にかかる直交型ロボット1は、特定方向に移動可能なスライダ43に、所定の作業を行うための作業ユニット10が取り付けられるように構成されており、上記ロボット1の駆動源である各種モータ17,35,47とそのコントローラ2とは、屈曲自在なケーブル保持部材63,71の内部を通るように配索されるケーブル56,54等を介して電気的に接続されている。上記ケーブル保持部材63,71の内部には、上記ケーブル56,54を通すための第1の配索空間83,85と、上記作業ユニット10に接続される作業ユニット用ケーブル79を通すための第2の配索空間84,86とが形成され、これら第1および第2の配索空間(83,84等)が、仕切部材75,76を介して互いに仕切られている。
(もっと読む)
交差型ロボット
【課題】メンテナンス作業性の良い交差型ロボットを提供する。
【解決手段】直交型ロボット1は、X軸方向に延びるフレーム10とこれに沿って移動するスライダ11を具備するX軸ロボット3と、前記スライダ11に固定され、Y軸方向に延びるフレーム30とこれに沿って移動するスライダ31とを具備するY軸ロボット4とを有する。Y軸ロボット4は、前記スライダ11の取付部20に固定されるブラケット22を介してX軸ロボット3に固定される。ブラケット22は、ボルトBによりスライダ11に固定されている。スライダ11には、フレーム10の側方に膨出する膨出部分20aが設けられ、ブラケット22は、その一部が膨出部分20a上に重ねられた状態で、この膨出部分20aに対してスライダ11の下方からボルトBにより固定されている。
(もっと読む)
直交型ロボット
【課題】ロボットの製造コストをより低減する。
【解決手段】本発明にかかる直交型ロボット1では、X軸ロボット3,4の駆動源としての中空モータ17およびサーボモータ35と、これを制御するためのコントローラ2とが、各種ケーブル(50等)を介して電気的に接続されている。上記ケーブルは、上記各モータ17,35側から延びるモータケーブル51,52と、上記コントローラ2側から延びるメインケーブル50とを有しており、これら各ケーブル50〜52は、上記Y軸ロボット4のフレーム26の内部に形成された所定のスペースからなる結線部68で接続される。
(もっと読む)
交差型ロボットおよび単軸ロボット
【課題】直交型ロボットの使用に際し、その利便性を向上させる。
【解決手段】直交型ロボット1は、X軸方向に延びるフレーム10およびこれに沿って移動するスライダ11を具備するX軸ロボット3と、前記スライダ11に固定され、Y軸方向に延びるフレーム30およびこれに沿って移動するスライダ31とを具備するY軸ロボット4とを有する。スライダ11は、スライダ本体20と、これに固定されるY軸ロボット4取付用のブラケット22とから構成されている。ブラケット22は、スライダ11の移動方向(X軸方向)に沿ってY軸ロボット4よりも先方に突出するように構成され、かつ当該突出部分にT字溝23が形成されており、これによって、各種ツールや備品を組付け可能なパーツ取付部24がスライダ11に設けられている。
(もっと読む)
ロボット
【課題】ケーブル配線上の都合によるロボットの占有スペースの増大を抑制する。
【解決手段】本発明にかかる直交型ロボット1では、駆動源としての各種モータ17,35,47とコントローラ2とがメインケーブル50等のケーブルを介して電気的に接続されており、当該ケーブルのうち、コントローラ2側から延びる第1のケーブル55と、Y軸ロボット4のサーボモータ35側から延びる第2のケーブル56とが、X軸ロボット3のフレーム6の一側部に設置された中継ボックス49の内部で中継されている。上記第2のケーブル56は、上記中継ボックス49が設置される側のフレーム6の側部において当該フレーム6の底面から所定距離だけ上方に離間した高さに設置されたケーブル保持部材63の内部を通るように配索されており、上記中継ボックス49の下面または側面には、上記第1のケーブル55を内部に導入するためのケーブル導入部59が設けられている。
(もっと読む)
多関節ロボット
【課題】自重及びワーク質量による撓みを減少させ、アームの全長が長く設定されていても、ワークの長距離の搬送を精度良く行う。
【解決手段】多関節ロボット10は、水平に回動する第1アーム50と、第1アーム50の回動中心に対して同軸の扇形の支持板18と、第1アーム50と平行なサブアーム58と、第1アーム50及びサブアーム58の各先端に接続された連結部材52とを有する。支持板18には円弧レール40が設けられている。第1アーム50、サブアーム58及び連結部材52は平行リンクを構成する。円弧レール40は、第1アーム50の上面に設けられた係合部100と係合する。連結部材52には第2アーム54が回動自在に設けられ、該第2アーム54の先端には第3アーム56が回動自在に設けられいている。第3アーム56の先端には、ワークWを吸着するエンドエフェクタ59が設けられている。
(もっと読む)
マニピュレータ及びこれを用いた成膜装置
【課題】真空中で粉体を扱う環境でありながら、高い量産性を実現しうるマニピュレータ及びこれを用いた成膜装置を提供する。
【解決手段】第1部材と第2部材とが接触部を介して可動に接続され、該接触部及びその動作範囲が気密性を保持できるカバーで被包され、カバーは動作方向に伸縮可能であり、内側の気密領域と外部とが貫通孔で連通されているマニピュレータである。
上記マニピュレータを2つ以上組み合わせて成る多軸マニピュレータである。
上記マニピュレータ又は上記多軸マニピュレータ及び原料粉末供給・噴射手段を気密チャンバー内に配設し、マニピュレータ又は上記多軸マニピュレータが第1部材としてガイド、第2部材としてステージを備え、気密チャンバー内を減圧する機能を備えている成膜装置である。
(もっと読む)
81 - 100 / 168
[ Back to top ]