
Fターム[3C007HT21]の内容
マニピュレータ、ロボット (46,145) | 伝動装置(挟持装置は除く) (1,840) | 歯車 (480)
Fターム[3C007HT21]の下位に属するFターム
Fターム[3C007HT21]に分類される特許
41 - 60 / 107
搬送装置
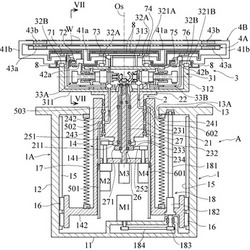
【課題】真空雰囲気下で加熱された板状ワークを搬送する場合において、当該ワークからの熱による不都合を解消ないし低減する。
【解決手段】搬送装置Aは、固定ベース1と、固定ベース1に対して旋回可能に支持された旋回ベース2と、旋回ベース2に支持され、ガイドレール32A,32Bを含んで構成された直線移動機構3と、ガイドレール32A,32Bに支持され、直線移動機構3の作動によりワークWを水平直線状の移動行程に沿って搬送するハンド4A,4Bとを備える。ハンド4A,4Bとガイドレール32A,32Bとの間には熱反射板8が設けられる一方、固定ベース1および旋回ベース2には、固定ベース1側と旋回ベース2側とを常に連通させる空間502,602を含んで構成された冷媒循環路が設けられている。上記冷媒循環路は、上記熱反射板8に接するように取り回された冷却管71,73,74,76を含む。
(もっと読む)
基板搬送ロボット

【課題】 位置決め精度を向上するとともに、外部の物体との干渉を防ぐことができる基板搬送ロボットを提供する。
【解決手段】 第1および第2アーム部36,37は、互いに相対的に旋回可能に設けられる。第1および第2アーム部36,37間の関節には、第2旋回駆動手段42が設けられる。第2旋回駆動手段42は、第2モータ76と、第2動力伝達部77とを有する。第2モータ76は、第1アーム部36に固定される固定部78と、固定部78に対して、第1アーム部36の延在方向に略平行な回転軸線L22まわりに回転する回転部79とを有する。第2動力伝達部77は、第2モータ76と第2アーム部37との間に介在し、第2モータ76の動力を、第2モータ76の回転部79から第2アーム部37に伝達する。このような第2旋回駆動手段42によって、第1および第2アーム部36,37が互いに相対的に旋回駆動される。
(もっと読む)
搬送装置
【課題】小型で装置環境を汚染しない搬送装置を提供する。
【解決手段】搬送装置1、2は、死点脱出機構50が簡単な構造で厚みが薄い。また、ハンド部20の連結部が薄くできるため、ハンド部20を挿入するゲートバルブの開口を小さくすることができる。その結果、搬送室内のダストが処理室に侵入しにくくなる。第一、第二の回転軸11、12が、同心状に配置されているため、装置の設置面積が小さく、また、旋回半径が小さいので、この搬送装置1、2を配置する搬送室を小さくすることができる。
(もっと読む)
作業補助アーム
【課題】別途にセンサを必要とせず、任意の案内面上に拘束することができる作業補助アームを得る。
【解決手段】3軸の変位量に基づきその作業座標が決定されるアームを設け、3軸をそれぞれ対応した3つの変速機を介して差動機構で結合し、3つの変速機の変速比を、指示された案内面以外へのアーム手先の移動を拘束するよう制御装置41によって制御するようにした作業補助アームであって、3軸の回転角度を検出する回転角度検出器40と、ユーザにより指示された仮想的な案内面を入力する面指示手段42とを設け、制御装置41は、検出された回転角度、及び指示された仮想的な案内面に基づき、現在のアーム手先の位置を含み、かつ前記案内面とは平行ではない補正用案内面を計算する補正用案内面計算手段301を含み、補正用案内面計算手段301により計算された補正用案内面に沿って、前記アーム手先が動くように3つの変速機の変速比を求める。
(もっと読む)
手投げ式ロボット
【課題】突起物がなくても架台の回転を防止し、略ボール状に縮小を変形可能とした。
【解決手段】モータ4を内蔵した架台2と、架台の左右にギアボックス9を介してモータに連繋して回転可能で、内部中空の略半球状の1対の可動輪3と、ギアボックス9内において可動輪3の駆動軸12と同一軸線上に配置され、可動輪の回転方向に対して常時逆転方向に回転することにより、架台2を静止状態に保持する逆転機構とを備え、駆動軸12を可動輪3に設けた軸受部11に対して軸方向に移動可能に連結し、可動輪3同士を軸方向に沿って離接可能に連結した。
(もっと読む)
二足歩行ロボット
【課題】ロボットの屈伸動作時や膝関節を屈曲させた姿勢時等にもバランスを維持する。
【解決手段】モータ20の本体を大腿リンク10と一体に回動する第1膝部プーリ12に接続し、モータ軸201を下腿リンク15と一体に回動する第2膝部プーリ17に接続する。第1膝部プーリ12と足首関節部5に設けた足首部プーリ13との径比は1:2で両者にはベルト14が巻掛けられ、第2膝部プーリ17と股関節部3に設けた股部プーリ18との径比も1:2で両者にはベルト19が巻掛けられる。モータ20を作動させ両リンク10、15間の相対的な回転位置関係を変えると、膝関節部3の回動と股関節部3及び足首関節部5の回動が連動し、足部6と胴体部1とは互いに同じ姿勢を保って互いに近付くように動作する。このため、床面上で膝曲げを行っても胴体部1は直立姿勢を維持したまま下降し、胴体部1による重心はほぼ鉛直下方に作用するためバランスを崩しにくい。
(もっと読む)
アンギュラコンタクト玉軸受、建設機械用走行減速機のスプロケット支持装置及びロボットアームの関節装置
【課題】ラジアル荷重及び一方向のアキシアル荷重を2点接触で受けるアンギュラコンタクト玉軸受において、更なる剛性向上を図る。
【解決手段】玉5が外輪1の軌道面2および内輪3の軌道面4と軸受中心線Cの互いに反対側で接触し、その少なくとも一方の軌道面2と異なる接触角α1、α2の2点で接触するアンギュラコンタクト玉軸受において、内外輪の軌道面2、4間に前記玉5を総玉入れとし、隣り合う玉5、5間のすきまδの和Σδが玉5の直径を越えないように設定することにより、ラジアル荷重及び一方向のアキシアル荷重を受ける軌道面2、4の2接触点a、b;c、dの接触応力が可及的に低減され、その結果、2接触点a、b;c、dにおける弾性変形が抑制される。接触角α1、α3は15°〜25°、α2、α4は40°〜50°、広がり角β1、β2は20°以上が好ましい。
(もっと読む)
減速装置およびそれを備えたロボット装置
【課題】 メンテナンスを容易に行うことができ、減速機の能力を妨げることなく金属磨耗紛除去の十分な効果を持つと共に、減速機周りのグリースに混入した金属磨耗紛を除去する減速装置およびそれを備えたロボット装置を提供する。
【解決手段】 固定側フランジ1と、固定側フランジ1により締結された減速機2と、減速機2の出力部に締結された可動側フランジ6と、可動側フランジ6に締結された回転機7と、固定側フランジ1と減速機2との間に設けられた第1グリース溜り3と、可動側フランジ6と減速機2との間に設けられた第2グリース溜り8と、を備えた減速装置において、固定側フランジ1と可動側フランジ6には、それぞれ該フランジ1、6の外部とグリース溜り3、8内部とを貫通するネジ穴4、9が設けられ、ネジ穴4、9には金属磨耗粉除去ボルト5が着脱可能に取り付けられている。
(もっと読む)
マニピュレータ
【課題】関節部において、動力伝達部材であるワイヤや歯車等が作業対象に接触することを回避可能なマニピュレータを提供する。
【解決手段】マニピュレータの作業部12aは、操作指令部と、操作指令部に設けられた横ローラ及び縦ローラと、横ローラ及び縦ローラの操作に基づいて回転する2つの駆動プーリと、連結部と、連結部の先端側に設けられた第1回転軸Oyと、該第1回転軸Oyと直交する第2回転軸Opと、第1回転軸Oyを構成するシャフト110に軸支された2つの筒体と、後方部が2つの駆動プーリに巻き掛けられ、前方部が2つの筒体に巻き掛けられたワイヤ52及び54とを有する。そして、駆動機構部102は一方の筒体の回転に連動して第1回転軸Oyを中心として動作し、エンドエフェクタ104は他方の筒体の回転に連動して第2回転軸Opを中心として動作する。
(もっと読む)
医療用マニピュレータ
【課題】ロール回転機構の回転角度を容易に認識できるようにする。
【解決手段】マニピュレータ1102は、中空のシャフト108と、シャフト108に設けられたワイヤ52、54、56と、シャフト108の一端に設けられ、ワイヤ52、54、56の少なくとも1本によって動作し、先端を指向する軸Orを中心に回転するロール回転機構を含む先端動作部1118を備える作業部1106とを有する。ロール回転機構で相対的に回転をする基端側部材の先端側面1108aと先端側部材のカバー160のうち、カバー160には、先端側面1108aの相対的な回転の程度を示す回転程度認識手段1208を有する。先端側面1108aは、カバー160の初期の位置を示すアライメントインジケータ1210を有する。
(もっと読む)
マニピュレータ
【課題】処置部の自由度が高いマニピュレータを一段と簡易な構成によって提供する。
【解決手段】処置対象に対して処置を行う処置部(作業部10)を先端に有する連結部40の長手方向に沿った方向に対して直交する回動軸16と、回動軸16回りに回動自在に支持され、回動軸16に対して直交する主軸部20bを有する主軸部材20と、回動軸16回りに回動自在に支持される歯車17と、回動軸16回りに回動自在に支持される歯車18と、歯車17と直交して噛み合い、回動軸16からオフセットした位置で主軸部20b回りに回動自在に支持される歯車22と、歯車18と直交して噛み合い、回動軸16からオフセットした位置で主軸部16回りに回動自在に支持される歯車23と、歯車22とともに回動する処置部材11と、歯車23とともに回動する処置部材12とを備える。
(もっと読む)
マニピュレータ
【課題】作業部のロール動作の操作が容易で、短時間のトレーニングで操作の習得が可能なマニピュレータを提供する。
【解決手段】マニピュレータ10は、人手で把持される操作指令部14と、該操作指令部14に設けられ、指で操作される複合入力部34と、操作部から延在する連結シャフト48と、該連結シャフトの先端に設けられた作業部12とを有する。作業部12は、ヨー回動機構、ロール回転機構及び開閉機構を有する。複合入力部34は、ロール回転機構を駆動するシャトルリング100と、ヨー回動機構を駆動するパッド132とを有する。シャトルリング100は、回動部材であって、左右に設けられた2つのノブ110a、110bを有する。パッド132はシャフトリング100の内側に設けられている。
(もっと読む)
ロボットシステム
【課題】ロボットに取り付けられたスイベルジョイント及び作業用機器並びに配管を取り外すことなく、スイベルジョイントの消耗部品を容易に交換できるロボットシステムを提供すること。
【解決手段】ロボット(マニピュレータ1)の手首部10にスイベルジョイント2及び作業用機器3が取り付けられているロボットシステムにおいて、手首部10の回動力はスイベルジョイント2が配置される収容部分Kを迂回して作業用機器3側に伝達されるようにしてあり、前記スイベルジョイント2は前記収容部分Kから取り出し可能である。
(もっと読む)
産業用ロボットアームの駆動機構
【課題】ロボットの基本的なアーム構成は従来と同じ形態でありながら、簡素な駆動系で、作業ツール用の線条体の導出部を最適に位置決めしつつ、作業ツール用機器を前腕に張り出しのないように配置したロボットアーム駆動機構を提供する。
【解決手段】第1手首要素22用モータ70は前腕18と上腕14との間の領域内に、その回転中心軸が第2軸線20に垂直になるように配置される。さらに、モータ70は第1軸線16より前腕18の長手方向に沿って前腕先端すなわち手首側にシフトした位置に配置されるので、前腕18の底部66上方にワイヤ送給装置34のための大きな空間を確保することができる。
(もっと読む)
産業用ロボット
【課題】比較的小型の構成でかつ高デューティでの動作を行う。
【解決手段】産業用ロボット(10)が、互いに同心に配置された三つの動力伝達部(21、22、23)と、これら三つの動力伝達部のそれぞれを駆動する三つの駆動手段とを具備し、三つの動力伝達部のうちの少なくとも一つの動力伝達部に対応する駆動手段が少なくとも二つのモータ(31、34)を含む。また、三つの動力伝達部および三つの駆動手段の全てが産業用ロボットのベース(15)に組入れられているのが好ましい。
(もっと読む)
ロボットの関節部の密封装置及び関節ロボット
【課題】ロボットの関節部に組み込んだ駆動機構からの潤滑剤や塵埃の漏出を確実に防止するとともに、ロボットの外部環境から関節部内への異物の侵入を確実に阻止する。
【解決手段】ロボットの第1関節部16に設けられる密封装置10は、第1駆動機構34に対して複数段に重複するシール部116、118を形成する。第1シール部116は、第1駆動機構34に与えられる潤滑剤保有部(空所108a、減速機42、軸受44、46、48)に隣接して形成される第1の部材間隙120をシールする第1の接触シール要素122を備える。第1シール部116の外側に配置される第2シール部118は、第1駆動機構34の収容空間108を画定する第1関節部16の周囲壁110に形成される第2の部材間隙124をシールする第2の接触シール要素126を備える。
(もっと読む)
脚と車輪を有する移動体
【課題】脚で胴体部を支持し、各脚の足部および関節部に車輪を有する移動体であって、同じモータの数で、車輪機能が増し、車輪走行状態、脚歩行状態、いずれにおいても休止しているモータがない移動体を提供する。
【解決手段】移動体10は、脚12で胴体部11を支持し、各脚が関節部で回動可能に連結された上脚12aと下脚12bからなり、各脚の足部、関節部、股部に車輪13を有する。各車輪13にそれぞれ内蔵されかつブレーキを内蔵する複数のインホイールモータ15と、各車輪の回転速度を減速する複数の減速機20と、該減速機による減速速度を連動する連動装置22とを備え、複数のインホイールモータを同期駆動して各車輪を回転させ、複数のインホイールモータを差動駆動して上脚と下脚を揺動させる。
(もっと読む)
産業用ロボットの手首駆動構造
【課題】本発明は、より狭い作業空間内で周囲との干渉なく作業をすることができるように、手首要素のコンパクト化を図ることできる産業用ロボットの手首駆動構造を提供する。
【解決手段】第1手首要素10内には、第2手首要素11と第3手首要素12とをそれぞれ駆動する二つのサーボモータ13,14と、個々のサーボモータの回転速度を所定の減速比で減速する二組のハイポイドギアセット15,20と、が設けられ、各組のハイポイドギアセットは、サーボモータにより駆動されるピニオンギア16,21と、ピニオンギアに噛合するリングギア17,22とからなり、二つのリングギア17,22が、第2軸線bを共有し、かつ、第2軸線bと同軸に配置され、二つの該ピニオンギアの歯すじがそれぞれ対照的に反対方向にねじれている。
(もっと読む)
作業機構及びマニピュレータ
【課題】作業機構及びマニピュレータの可動範囲、信頼性及び操作性を一層向上させる。
【解決手段】作業部12aは、ワイヤ56が巻き掛けられる筒体116よりも前方で、回転軸が筒体116と略平行に設けられる歯車体126と、歯車体114の回転を歯車体126に伝達する第1歯車118及び第2歯車134とを有する。筒体116よりも前方でワイヤ52及びワイヤ54が巻き掛けられる巻数や被巻回体の主軸部材128や歯車体130の大きさ等は筒体116に対するワイヤ56の巻回に影響がなく、ワイヤ56を筒体116のより広い領域に巻き掛けられ、歯車体114の回転量を大きくすることができる。これにより、歯車体114の回転量を大きくすることができるため、歯車体126の回転量及び回転トルクを大きく設定できる。
(もっと読む)
産業ロボット
【課題】主に上向きの作業を行い、前後左右方向に限られた空間に複数のロボットを稠密設置可能な、干渉域の少ない省スペースな、かつモータ・減速機への負荷を低減することができ、モータ・減速機容量を小さくすることが可能なアーム構造を有する産業ロボットを提供。
【解決手段】固定ベース1上に第1水平軸aの回りに回転自在に支持された第1垂直アーム2、第1垂直アーム2の先端に第1水平軸aと直交する第2水平軸bの回りに回転自在に支持された第2垂直アーム3、第2垂直アーム3上に支持された軸方向に直線移動可能な第3垂直アーム4及び第3垂直アーム4の上に支持された手首機構5を有する。
(もっと読む)
41 - 60 / 107
[ Back to top ]