
Fターム[3C007HT21]の内容
マニピュレータ、ロボット (46,145) | 伝動装置(挟持装置は除く) (1,840) | 歯車 (480)
Fターム[3C007HT21]の下位に属するFターム
Fターム[3C007HT21]に分類される特許
21 - 40 / 107
基板搬送システム
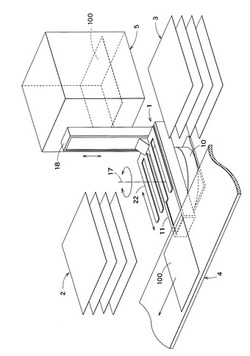
【課題】コンパクトなレイアウトを採用可能とするロボットを備えた基板搬送システムを提供する。
【解決手段】本発明の基板搬送システムはロボット1を備え、その周囲に基板搬出入手段4及び基板処理装置5が配置される。ロボット1は、基板100が略水平に保持されるエンドエフェクタ22と、エンドエフェクタ22を垂直方向に駆動する垂直駆動手段18と、垂直駆動手段18を水平方向に駆動する水平駆動手段11と、水平駆動手段11を垂直軸線17周りに回転駆動する回転駆動手段と、を備える。垂直駆動手段18にエンドエフェクタ22の端部が接続され、水平駆動手段11に垂直駆動手段18の端部が接続される。
(もっと読む)
スカラロボットの手首軸回転駆動機構

【課題】アームの質量及び慣性を低減可能として、アームとしての応答性能や位置決め精度を高く維持することのできるスカラロボットの手首軸回転駆動機構を提供する。
【解決手段】手首軸16にはそれを回転させるためのスプライン溝16sが形成されている。手首軸16の挿通されるスプラインナット22は、固定筒22aと回転筒22bからなり回転筒22bが回転されると、スプライン溝16sに嵌合されるベアリングを介して手首軸16が回転される。回転筒22bには第3モータM3の駆動力が回転動力の伝達機構により伝達される。すなわち第3モータM3からの回転動力が、基端側プーリ23からタイミングベルト26を介して先端側プーリ25に伝達され、同プーリ25に連動するピニオンギア27に噛合されるシザーズギア28から回転筒22bに伝達される。これにより、第3モータM3の正逆回転により手首軸16が正逆回転されるようになっている。
(もっと読む)
ストッパ装置
【課題】回転体を360度以上の角度位置で機械的にストップできるようにする。
【解決手段】ストッパ装置1は、第1のギア2と、この第1のギアと異なる歯数の第2のギア3と、中間ギア4とを備え、第1のギア2及び第2のギア3のいずれかを回転体に連結し、中間ギア4に対して、第1のギア2と第2のギア3とを軸方向に並ぶように噛合させ、第2のギア3に突起5を設け、第1のギア2に突起5と周方向で離間する一方向側被ストッパ部6A及び他方向側被ストッパ部を設けている。
(もっと読む)
物品搬送用垂直多関節アーム機構
【課題】駆動源の出力トルクを拡大して重量物の搬送に対応可能垂直多関節アーム機構を提供する。
【解決手段】所定部材3に第1関節部10を介して連結され、該第1関節部10周りに鉛直面内を旋回可能な第1アーム11と、該第1アーム11に第2関節部20を介して連結され、該第2関節部20周りに前記鉛直面と平行な鉛直面内を旋回可能な第2アーム21と、前記第1関節部10に設けられ、前記第1アーム11を前記第1関節部10周りに旋回させる第1駆動機構51と、前記第2関節部20に設けられ、前記第2アーム21を前記第2関節部20周りに旋回させる第2駆動機構52と、を有した物品搬送用垂直多関節アーム機構1である。前記第1駆動機構51及び前記第2駆動機構52の少なくとも一方の駆動機構は、駆動源61と、該駆動源61から入力される回転動作に基づいて前記アーム11,21の旋回動作を作り出すカム機構とを備える。
(もっと読む)
産業用ロボット
【課題】減速機を介して、位置検出センサを備え、サーボ機構により駆動されるサーボモータを駆動源とした旋回台又はアームの関節機構を有する産業用ロボットにおいて、減速機を交換することなく、関節機構の総減速比を簡単に変更できる構造を有する産業用ロボットを提供。
【解決手段】ベース1に固定されて旋回台2の軸線3回りにベース1に対して回転可能な減速機11と、サーボモータ12と、サーボモータ12と減速機11の間に配置されたギヤボックスケース16で関節機構を構成し、ギヤボックスケース16に、サーボモータ12のシャフト11に結合されたピニオンギヤ15と噛み合うアイドルギヤ14及びそれと噛み合う減速機11へのインプットギヤ13、を収納し、アイドルギヤ14は複数の取替え可能なピニオンギヤ15、20の歯数に対応した複数のアイドルギヤ取付穴21、22をギヤボックスケース16に設けた。
(もっと読む)
マニピュレータシステムおよびマニピュレータの制御方法
【課題】作用部の作用力を低下させずにアクチュエータの消費電力を低減でき、かつ構造を複雑化させずに済む。
【解決手段】マニピュレータシステムは、マスタスレーブ方式で動作するマニピュレータ本体1と、マニピュレータ本体1の駆動を制御する制御装置2とを備えている。制御装置2は、グリッパの把持力が一定になるまでモータ14cを駆動した後に、把持力が低下しない範囲でグリッパを開く方向にモータ14cを駆動するため、把持力を一定に維持したままモータ電流値を最大連続電流値以下に抑制することができ、消費電力の削減が図れるとともに、把持力が最大連続電流値により制限されるおそれもなくなる。
(もっと読む)
ロボット用関節駆動装置及びこれを備えたロボット
【課題】 関節を駆動するためのアクチュエーターの数を最小化できる構造のロボット用関節駆動装置及びこれを備えたロボットを提供する。
【解決手段】 正・逆回転可能に設けられた駆動モーターと、前記駆動モーターと結合され、前記駆動モーターの回転によって相互対向する方向に直線運動する一対の移動部材と、両端が前記一対の移動部材にそれぞれ連結されたワイヤーと、前記ワイヤーに巻かれ、前記ワイヤーの運動によって駆動される関節部とを含む。
(もっと読む)
ねじれ紐アクチュエータとそれを用いた義肢用アクチュエータユニット
【課題】ねじれ紐アクチュエータのスライド部材と駆動対象物を接続するワイヤの緩みを防止し張り具合を一定にする作業を短時間で行うことを可能にする。
【解決手段】ねじれ紐アクチュエータは、2本の紐を互いにねじり合わせた構造のねじれ紐1と、ねじれ紐1の基端側に接続された駆動機構部20と、ねじれ紐の先端側に接続されたスライド部材32と、その先端側と駆動対象物との間に接続されるワイヤ5とを備えている。駆動機構部20の作動に伴いねじれ紐1の長さが変化してスライド部材32がねじれ紐1の長手方向に変位し、その変位がワイヤ5を介して駆動対象物に伝達される。スライド部材32とワイヤ5との接続部に、ワイヤ5の張り具合を調整する調整手段7が設けられている。
(もっと読む)
ロボット内蔵減速機の故障診断方法及び装置
【課題】各種の減速機について、その磨耗に起因して逐次検出したグリスに含まれる鉄粉濃度を基にグリスの頻繁なサンプリング或いは減速機の点検等から最終的に減速機の交換に至る保守レベルを確認可能にするロボット内蔵減速機の故障診断方法を提供する。
【解決手段】減速機の所定の負荷状態でのモータの積算回転量に対応する仕事量と、鉄粉濃度との関係を規定する磨耗進行特性(図3)を作成し、増加する複数段階の仕事量範囲W1〜W3に対して減速機の交換に至る保守作業の内容を規定する複数段階の保守レベルを磨耗の進行度に応じて指示し得るように、磨耗進行特性を基に鉄粉濃度の許容値上限値をそれぞれ規定する保守レベル指示データを作成し、定期的にグリスをサンプリングした時点の仕事量に対する鉄粉濃度が、許容上限値を上廻るか否かを判断することにより、所属の仕事量範囲W1〜W3の保守レベルを指示する。
(もっと読む)
関節を通るワイヤーと関節の非干渉駆動機構
【課題】 関節を持つ機械の軽量化と、慣性モーメントの軽減による動作の高速化を、ワイヤーを使った、制御のしやすい非干渉機構によって実現する。
【解決手段】 一定の屈曲角比で2段に渡って同一方向に屈曲する関節3に、ワイヤー6の巻き付き弧長の変化が等しくなるよう、屈曲角比の逆比の径を持つ滑車1,2を2つの屈曲軸に配置し、ワイヤー6をたすき掛け状に通すことにより、関節の屈曲時、一方の滑車からほどけたワイヤー6の長さ分が、他方の滑車に巻き付くため、ワイヤー6の繰り出し長に変化がなく、駆動力および変位において、関節3の駆動とワイヤー6の駆動が非干渉となる。
(もっと読む)
電動グリッパ装置
【課題】微妙かつ応答性の速い部品取り替え制御が可能であるとともに、製作が容易で、しかも、装置全体の力学的な安定性が高い電動グリッパ装置を提供する。
【解決手段】門形フレーム4の両側の垂直枠部4a・4b間に、中空体であるグリッパ旋回台5を軸支し、この中空のグリッパ旋回台内に第1及び第2の電動グリッパ6A・6Bのモータを設置する一方、これら第1及び第2の電動グリッパの開閉する把持部材68a・68bを、グリッパ旋回台の第1の外面と第2の外面とに、レール63と共に分けて装着し、このグリッパ旋回台を門形フレームに搭載された垂直旋回用モータ13にて垂直旋回させることにより、第1電動グリッパの把持部材と第2電動グリッパの把持部材とを、門形フレームに対して下向きとなる第1の位置と、これよりも上向きとなる第2の位置とに位置交換できるようにする。
(もっと読む)
ロボット玩具およびその組立方法
【課題】ロボット玩具のホームポジションとサーボ・ゼロ位置とを簡単に合致させる。
【解決手段】ロボット玩具1は、サーボ3が取り付けられたブロック10と、ボス21aにサーボ3の出力軸34が嵌合することによってブロック10に連結される他のブロック21と、サーボ3を制御する制御装置100とを備える。サーボ3には、出力軸34に追従して回転する回転盤33aと、回転盤33aに対向して配設されるとともに、ユーザ操作に基づいて回転盤33aと平行な面内で当該回転盤33aに対して相対回転する回転盤33bと、回転盤33a,33bにおける基準線33c,33d同士の相対角度を検出する回路パターン8,9とが設けられている。制御装置100は、出力軸34とともに回転盤33aを回転させ、前記相対角度が0となるときのサーボ3の位置を中心位置としてサーボ3を制御する。
(もっと読む)
ロボットの手首装置
【課題】 ワークの周囲に配置される設備にケーブルを干渉させずに、狭隘環境であっても円滑に作業することができるロボットの手首装置を提供する。
【解決手段】 第1旋回部44の一対のアーム43a,43b間に第6軸J6に沿って貫通する第1貫通孔45が形成される揺動部46を第5軸J5まわりに揺動可能に設け、この揺動部46に第1貫通孔45に連通する第2貫通孔47を有する第2旋回部48を第6軸J6まわりに旋回可能に設ける。
(もっと読む)
搬送装置および大型搬送装置
【課題】基台と搬送レベルとが異なる場合でも、第1アームと第2アームを同調させてほぼ直線的にワークを搬送できる搬送装置を提供する。その搬送装置を利用した大型搬送装置を提供する。
【解決手段】基台11に第1アーム12を第1軸J1廻りに回動自在に設け、第1アーム12の先端に、第1アームと長さが異なる第2アーム13を第2軸J2廻りに回動自在に設け、第2アーム13の先端にハンド14を取り付け、第1アーム12を往復揺動駆動する第1モータM1を基台11に設ける。基台11には第1軸J1と同心状に第1ピニオン16を固定し、第2アーム13の基端に、第2軸J2と同心状に第2ピニオン17を固定し、第1ピニオン16と第2ピニオン17の左右両側にラック18、19を摺動自在に設けて搬送装置10を構成する。2基の搬送装置10を一対で配置し、ハンド14同士を搬送ビームで連結することにより、大型搬送装置を構成する。
(もっと読む)
関節装置
【課題】1関節に2自由度を有し、確実な動作を実現するスリムな関節装置を提供する。
【解決手段】関節装置10は、アーム1の端部とアーム2の端部とが互いに可動自在に連結する。そして、第1交差歯車3と第3及び第4歯車13・14を備える。第1交差歯車3は、関節部1jに配置される。又、第1交差歯車3は、第1歯車31と第2歯車32が中心を共有する。第1及び第2歯車31・32は、平歯車となっている。第1歯車31と第2歯車32とは、十字状に交差している。第1歯車31と噛み合う第3歯車13がアーム1に設けられる。第2歯車32と噛み合う第4歯車14がアーム2に設けられる。第3歯車13を回転するとアーム2に対して、アーム1を可動できる。第4歯車14を回転するとアーム1に対して、アーム2を可動できる。
(もっと読む)
脚車輪モジュール及び脚車輪型ロボット
【課題】下腿部を構成するリンクの外郭フレームによってモータを含む回転駆動部を外部の衝撃から保護することが可能な脚車輪モジュール、該脚車輪モジュールを含んで成る脚部を有する脚車輪型ロボットを提供する。
【解決手段】脚車輪型ロボットの駆動輪20を回転駆動する車輪駆動機構190を、車輪モータ50の回転力をその回転方向を変換し且つ回転速度を減速して動力伝達用回転軸190bに伝達する駆動及び従動傘歯車190a及び190cと、動力伝達用回転軸190bの回転力を回転速度を減速して減速用回転軸190eに伝達する動力伝達用平歯車190d及び減速用平歯車190fと、減速用回転軸190eの回転力を車輪回転軸190hに伝達する駆動、従動プーリ190g、190i及びベルト190jとを含んだ構成とし、車輪駆動機構190を、下腿部リンクのフレームを構成する車輪駆動部用ハウジング19cの内側に配設する構成とした。
(もっと読む)
スカラロボット
【課題】ワークを組み付けるサイクルタイムを短縮し、ワークの組み付け精度を高められるスカラロボットを提供する。
【解決手段】第一回転軸11を中心に回動する第一アーム21と、この第一アーム21の先端部23に設けられる第二回転軸31と、この第二回転軸31を中心に回動する第二アーム41とを備え、この第二アーム41の先端部43ハンドリング部51が設けられ、第一アーム21と第二アーム41とをそれぞれ回動させることによってこのハンドリング部51を少なくとも2次元方向に移動するスカラロボット1であって、第二アーム41の長さL2を第一アーム21の長さL1より短くし、第一アーム21に凹状に窪むハンドリング凹部35を形成し、第二アーム41が一方に回動することによりハンドリング部51がこのハンドリング凹部35に収まる構成とした。
(もっと読む)
義手用アクチュエータユニット
【課題】ねじれ紐式アクチュエータを複数組備えた義手用アクチュエータユニットにおいて、駆動機構部を含む複数のねじれ紐アクチュエータを空間的に効率よく配置することができる構造を提供する。
【解決手段】ねじり紐アクチュエータは、2本の紐を互いにねじり合わせた構造のねじれ紐1と、ねじれ紐1の基端側に接続された駆動機構部20と、ねじれ紐の先端側に接続されたスライド部材32とを備え、駆動機構部の作動に伴いねじれ紐1を構成する2本の紐のねじれが強められたり緩められたりすることによりねじれ紐1の長さが変化し、その結果、スライド部材32がねじれ紐1の長手方向に変位する。複数組の長尺状のねじり紐アクチュエータが、略円筒形状の周方向に沿って並ぶように、かつ、各ねじり紐アクチュエータの長手方向が略円筒形状の軸方向に沿うように配置されている。
(もっと読む)
関節の変速駆動機構
【課題】 駆動源の負荷を軽減させつつ、高トルク駆動,高速駆動を両立する関節を実現する。
【解決手段】 駆動側クランク1と作動側クランク2をロッド3で接続して非平行四辺形リンクを構成し、一方のクランクが死点付近にあるとき、他方のクランクとロッド3のなす角が90°付近になるようにし、力の伝達関数を非線形にする。これにより高負荷となる姿勢では高トルクで、低負荷となる姿勢では高速で関節4を駆動することができる。
(もっと読む)
偏心揺動型歯車装置及び偏心揺動型歯車装置を備えた産業用ロボットの関節構造
【課題】 安価で軸方向に短い偏心揺動型歯車装置を提供するとともに、組立工数が少なく且つ簡単に関節部を組み立てることができる産業用ロボットの関節構造を提供することを目的とする。
【解決手段】内歯歯車と、複数の第一貫通孔及び複数の第二貫通孔を有する外歯歯車と、伝達歯車を有するとともに外歯歯車を偏心運動させる複数のクランク軸と、クランク軸を回転自在に支持する支持体と、内歯歯車の内周面及び支持体の外周面間に設けられた一対の主軸受、各クランク軸の伝達歯車に噛み合う単一の円筒歯車と、一対の端板部に一対の軸受を介して回転自在に支持されるとともに、一対の軸受間に配置されて円筒歯車に噛み合う中間歯車、及び軸方向の端部に設けられた入力歯車を有する入力軸とを備え、入力歯車と一対の主軸受の一方とが放射方向の同一平面上に配置されている偏心揺動型歯車装置装置。
(もっと読む)
21 - 40 / 107
[ Back to top ]