
Fターム[3C007HT24]の内容
マニピュレータ、ロボット (46,145) | 伝動装置(挟持装置は除く) (1,840) | 歯車 (480) | 傘歯車 (81)
Fターム[3C007HT24]に分類される特許
1 - 20 / 81
関節装置
【課題】ロボットの関節装置において、第1連結部と第2連結部の相対回転角度を規制する機構を持ちながらも、360゜を超える相対回転角度を実現する。
【解決手段】第1連結部1と第2連結部2を軸受部を介して連結し、第1連結部1に設けられた第1ストッパーピン6と、第2連結部2に設けられた第2ストッパーピン8と、第2連結部2と同心でフリーに回転可能な中間リング7と、を備え、中間リング7は、第1ストッパーピン6に対して第1回転角度(θ1)だけ回転可能にする突出部7dと、第2ストッパーピン8に対して第2回転角度(θ2)だけ回転可能にする凹部7dと、を備え、突出部7dと凹部7eのいずれか一方により、それ以上の回転が規制された後も、突出部7dと凹部7eのいずれか他方により回転が規制されるまで、第1連結部1と第2連結部2の相対回転角度を最大で、(θ1+θ2)まで許容する。
(もっと読む)
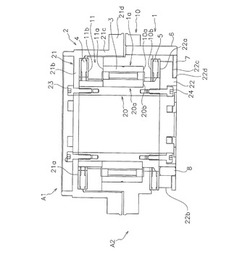
サーボ、および、これに用いられるコネクタ

【課題】直列に接続することを可能にし、かつ配線の複雑度および構造を組み立てる際の難度を低減可能なサーボを提供する。
【解決手段】駆動部は、ハウジング20内に装着され、出力軸を有する。メス接続部はハウジング20内に装着され、メス端子364を有し、メス端子364は駆動部の出力軸に接続され、出力軸に駆動され回転可能である。オス接続部はハウジング20内に装着され、オス接続部とメス接続部とは駆動部の向かい合う両側に位置付けられ、かつ電気的に接続される。オス接続部はオス端子を有し、オス端子とメス接続部のメス端子とは互いに対応し、かつ別の一つのサーボのメス接続部のメス端子の接続に用いられる。
(もっと読む)
二足歩行ロボットの股関節構造
【課題】傾斜角度のある斜面での直進歩行を実現し、軽量化および製作コストを削減したロボットを提供することを目的とする。
【解決手段】胴体部及び該胴体部に連結される左右の脚部を有する二足歩行ロボットにおいて、左脚部に連結する左サイドギア、該左サイドギアに噛合される左ピニオンギアとを備える左モジュールと、右脚部に連結する右サイドギア、該右サイドギアに噛合される右ピニオンギアとを備える右モジュールと、前記2つのモジュールを平行リンク又は同径のプーリで結合させ、胴体部に対して常に同位相同角度で傾斜するように拘束し、さらに前記各ピニオンギアを同径のプーリで同期させることにより前後の脚部運動が逆位相同角度となるように拘束することを特徴とする。
(もっと読む)
多関節ロボットおよびロボット関節構造
【課題】バックラッシュによるガタツキを抑制することにより、関節部を精度よく動作させることが可能な多関節ロボットを提供する。
【解決手段】この多関節ロボット100は、骨格フレーム21側に設けられ、互いに対向するように配置されるとともに、曲げ軸L4を回動中心として互いに独立して回動可能な一対の入力側傘歯車62と、一対の入力側傘歯車62の両方に噛み合うように骨格フレーム31側に設けられ、一対の入力側傘歯車62が回動することによって、回動軸L3を回動中心として回動可能であるとともに曲げ軸L4回りに揺動可能な出力側傘歯車63と、一対の入力側傘歯車62の両方に噛み合った状態で出力側傘歯車63を回動軸L3回りの一方の回動方向に付勢する定荷重バネ64とを含む。
(もっと読む)
装着型動作支援装置
【課題】腰部フレームと、腰部フレームの上部に接続されて装着者の肩に係留される背部フレームと、腰部フレームの下部に接続されて装着者の下肢に係留される下肢フレームとを備えた身体装着型動作支援装置であって、装着者の歩行時に装着者の骨盤の揺動に起因する背部フレームの揺れを抑制することを目的とする。
【解決手段】装着型動作支援装置10に、装着者の左右方向に長尺な基部31を有する腰部フレーム30と、腰部フレーム30の下部に接続される左右一対の下肢フレーム50,50と、腰部フレーム30の基部31の上部に接続される背部フレーム40と、背部フレーム40と腰部フレーム30の基部31とを接続する接続部70とを備える。接続部70は、前額面上の1自由度の回転機構であって、例えば、四節リンク機構で構成される。
(もっと読む)
医療用マニピュレータ
【課題】先端動作部の軌跡精度や位置決め精度を効果的に向上できる医療用マニピュレータを提供することを目的とする。
【解決手段】医療用マニピュレータ10における先端動作部12は、エンドエフェクタ19と、ヨー軸Oyを中心に動作可能な主軸部材100と、ロール軸Orを中心に動作可能なギア体102とを有する。ヨー軸操作指令を受けた場合、ヨー軸駆動系のガタ分を補償するように、主軸部材100の駆動源である第1モータ50aの補償制御がなされる。ロール軸操作指令を受けた場合、ヨー軸駆動系のガタおよび弾性変形に起因するヨー動作の発生を防止または抑制するように第1モータ50aの補償制御がなされる。
(もっと読む)
装着型動作支援装置
【課題】動作時に身体の装着部に対するずれ動きを最小限に抑えるようにする。
【解決手段】装着型動作支援装置SUは、肘関節A3を挟む上腕部A1に装着される第1サポート部材10と、前腕部A2に装着されると共に第1サポート部材10に連結され、肘関節A3の屈曲動作に合わせて姿勢変位可能な第2サポート部材12とを備える。第2サポート部材12は、前腕部A2に装着される前腕装着部45を備え、この前腕装着部45は、前腕部A2の最も細い部位である関節骨格部位A7に保持される保持部51を備える。また前腕装着部45は、肘関節A3から手首関節A4に近づくにつれて捻れた形状に形成され、前腕部A2を包み込むように装着される。前腕装着部45の前腕部A2に臨む内側面にノンスリップ加工が施されており、前腕部A2に対して前腕装着部45が滑り難くなっている。
(もっと読む)
医療用マニピュレータ
【課題】駆動源から先端動作部に駆動力を伝達する動力伝達経路上に設けられた可撓性を有する動力伝達部材の異常の有無を判断できる医療用マニピュレータを提供する。
【解決手段】医療用マニピュレータ10において、モータ50a、50bの駆動力はワイヤ80a、80bを介して先端動作部12に伝達される。モータ50a、50bは、コントローラにより駆動制御される。コントローラ29は、始業前点検として、規定信号に従ってモータ50a、50bを動作させ、エンコーダ51a、51bからの信号に基づいてモータ50a、50bの動作角度を監視し、モータ50a、50bが目標角度に達するのに要する動作時間に基づいて、ワイヤ80a、80bの異常の有無を判断する。
(もっと読む)
ロボットのリンク装置
【課題】ロボットの歩行脚またはアームとして機能するロボットのリンク装置において、関節にガタなどを設けても、高精度に、第1のリンクに対する第2のリンクの回転角を制御できるようにする。
【解決手段】歩行脚またはアームを構成する第1および第2のリンク3、5と、リンク3、5を連結する関節7とを備える。関節は、第1および第2の関節部7a、7bを有する。第1および第2の関節部は、リンク3、5の一方に対し衝撃吸収用のガタをもって取り付けられ、リンク3、5との他方に対し関節の軸周りに回転可能に取り付けられる。第1および第2のモータ9、11は、第1および第2の関節部を同じ方向に回転駆動することで、第1のリンクに対し第2のリンクを回転させ、第1および第2の関節部を逆方向に回転駆動することで、回転方向のガタの大きさを調整する。
(もっと読む)
機能性粒子を用いた触力覚提示システム
【課題】
機能性粒子を使用したブレーキを用いたパッシブ型触力覚提示システムにおける粒子の沈降の問題、および/または、的確な力覚を提示できる必要最小個数数のパッシブな力発生部を用いた力覚提示装置の提供
【解決手段】人間に対し、力感覚を提示する回転関節型リンク機構のパッシブ型力覚提示システムであって、人間が操作する操作部と、前記操作部の位置を検出する位置検出部と、前記位置検出部の出力を入力して、前記パッシブ型力発生部を制御する制御装置とを備えることを特徴とする装置であり,的確な力覚を提示することができる.機能性粒子の沈降の問題は、ブレーキ力伝達部の機構およびブレーキ回転軸の取り付け方向で解決し、的確な力覚を提示できる必要最小個数数のパッシブな力発生部を用いた力覚提示装置の提供のためには図9のような機構により解決する。
(もっと読む)
移載装置
【課題】小型で高速動作が可能な移載装置を安価に提供する。
【解決手段】側面に第1と第2の円筒溝カム(11,12)、底面51に溝カム52が形成されたシリンダー4と、ピニオンギア23環装され、第1円筒溝カムにより上下するシャフト部21と、第2円筒溝カムによってシャフト部内で上下するロッド部22と、ピニオンギアに歯合して溝カムにより前後するラックギア54と、物体W1の把持と開放を相補的に行う二つ一組のチャック部31を備えたチャックユニット6aを備え、ピニオンギアはシャフト部を介してチャックユニットを旋回させ、ロッド部はシャフト部と同期して上下するとともに、シャフト部の下死点停留期間Δt2中にさらに下方の第2下死点Dd2に至り、二つ一組のチャック部はロッド部が第2下死点に至ったときに、それぞれの把持状態と開放状態を切り替え、上死点と第1の下死点までの区間ではその状態を維持する。
(もっと読む)
マニピュレータ用関節部
【課題】組立てが容易でコストの低減化を図り、高精度のマニピュレータ動作を行うことができる小型のマニピュレータ用関節部を提供する。
【解決手段】基部アーム及び回動アームの端部同士を連結し、端部を支点として前記回動アームを回動させるマニピュレータ用関節部である。マニピュレータ用関節部は、基部アームの端部に配設された関節軸と、回動アームの端部に形成されたユニット装着孔に嵌合する円筒状のハウジングと、該ハウジングの内部に配設され回動アームを関節軸に対して回転自在に支持する複列の転がり軸受と、を有する軸受ユニットと、を備える。ハウジングには、軸方向一方側の外周面に外径側に突出する鍔部が形成され、軸方向他方側の外周面に雄ネジ部が形成され、雄ネジ部にナットを螺合させることにより、回動アームが鍔部とナットに挟まれて軸受ユニットに固定される。
(もっと読む)
人型歩行ロボット用脚
【課題】人型歩行ロボット用脚において、人の脚、特に女性の脚に近いスリムなプロポーションを実現することにある。
【解決手段】下腿8の上部に配置したモータ13aと直線駆動機構13bとをベルト式伝動機構13dで駆動結合し、下腿8下部に配置したモータ14aと下腿8の左右方向へ延在する中間軸14bとをベベルギヤ組14cで駆動結合し、下腿8に軸線P4周りに揺動可能に支持した関節部材11cに足9を軸線R3周りに揺動可能に支持し、軸線R3上に同軸型減速機14dを配置してその出力要素を足9に結合し、関節部材11cの、軸線P4上から外れた部位と直線駆動機構13bの出力要素13fとをリンク部材13hで連結し、関節部材11cの、軸線P4上の位置に回動可能に支持した中間軸14eと、中間軸14bとをベルト式伝動機構14hで駆動結合し、同軸型減速機14dの入力要素と中間軸14eとをベベルギヤ組14iで駆動結合する。
(もっと読む)
可変剛性機構及びロボット
【課題】小型の機構で安全性と制御性能を両立できるようにするとともに、最も剛性を高くした状態での剛性を非常に高くすることができる可変剛性機構及びロボットを提供する。
【解決手段】固定部材と、収縮量によってばね定数が変化する非線形ばねと、固定部材との位置を非線形ばねによって支持される支持部材と、非線形ばねに力を加えて非線形ばねの収縮量を変化させる加圧部材と、加圧部材の位置を動かすための剛性調節アクチュエータとを有し、支持部材は、少なくとも1つの突起部を備え、突起部はそれぞれ非線形ばねによって挟まれており、剛性調節アクチュエータは固定部材と加圧部材との位置を変化させる。
(もっと読む)
3自由度を有する姿勢変更機構を備えたパラレルリンクロボット
【課題】姿勢変更軸の自由度を増加したパラレルリンクロボットを提供すること。
【解決手段】基礎部材12と可動部材100の間を駆動リンク30と受動リンク32からなる3組のリンク機構26を並列に関節接続すると共に、可動部材100にエンドエフェクタの姿勢を制御するための3自由度を有する姿勢変更機構部102を備えたパラレルリンクロボットPRにおいて、可動部材100に、可動部材100と3つの受動リンク32を接続する各関節部36の回転軸線を含む平面に対して垂直な第4軸線回りに回転可能に接続された第1回転部材と、前記第1回転部材に、前記第4軸線に直交する第5軸線回りに回転可能に接続された第2回転部材と、前記第2回転部材に、前記第5軸線に直交する第6軸線回りに回転可能に接続されることを特徴とするパラレルリンクロボット。
(もっと読む)
マニピュレータ及びこれを用いたマニピュレーション装置
【課題】簡易でかつ新規な構造を持つ、屈曲動作が可能なマニピュレータを提供する。
【解決手段】第1駆動シャフト101は、それ自身の中心軸を中心として回動する。第2フレーム104は、第1フレーム102に対して回動する。第1フェースギヤ部材103は、第1駆動シャフト101により、正逆方向に回転駆動される。第3フレーム108は、第2フレーム104に対して回動する。第1ギヤ部材105は、第2フレーム104に固定されている。第1ギヤ部材105及び第2ギヤ部材106は、いずれも、第1フェースギヤ部材103によって回転駆動される。第2フレーム104は、第1ギヤ部材105の回動に伴って回動する。第3ギヤ部材107は、第2ギヤ部材106によって回転駆動される。第3ギヤ部材107は、第3フレーム108に固定されている。第3フレーム108は、第3ギヤ部材107の回動に伴って回動する。
(もっと読む)
産業用ロボットの手首駆動構造
【課題】手首部材を支持するアームをスリム化させた産業用ロボットの手首取付構造を提供する。
【解決手段】ロボットの第2アーム14に手首部材15を揺動可能かつ回転可能に配設する。手首部材15の揺動機構は、手首部材15と連結されると共に第2アーム14に回転自在に配設された第1従動回転軸22に軸支された第1歯車21と、第1モータ61と、減速機40と、第1モータ61の回転を減速機40に伝達する第1ベルト64と、減速機40の出力側回転軸に軸支され第1歯車21と噛合する第2歯車41を有する。手首部材15の回転機構は、第2モータ66と、第1従動回転軸22と同軸に配置された第2従動回転軸31と、第2従動回転軸31の回転をこれと直交する軸の回転に変換する傘歯車35,36と、第2モータ66の回転を第2従動回転軸31に伝達する第2ベルト69を有している。第1ベルト64と第2ベルト69を同一面内で回転させる。
(もっと読む)
被塗装物保持ロボットおよび塗装用ロボットシステム
【課題】塗装中に吹き付けの気流が乱れ、ロボット等の装置周辺を余分な塗料で汚染することを防止することが可能な被塗装物保持ロボットおよび塗装用ロボットシステムを提供する。
【解決手段】被塗装物保持ロボット10は、固定されたベース部20と、第1軸J1を中心にベース部20に対して旋回する細長状の第1アーム11とを備えている。L字状の第2アーム12は、第2軸J2を中心に第1アーム11に対して旋回し、細長状の第3アーム13は、第3軸J3を中心に第2アーム12に対して旋回する。また第3アーム13の先端13bに、被塗装物Wを保持する第1保持部14が設けられている。
(もっと読む)
関節機構
【課題】1つの駆動源を動作させることによって2つの自由度を実現することができる関節機構を提供すること。
【解決手段】本発明の関節機構は、少なくとも固定状態となる第1のギア10と、第1のギア10の中心軸方向に第1のギア10と対向して配置され、回転可能とされた第2のギア20と、第2のギア20を回転させる第2のギア用駆動源21と、第1のギア10の中心軸方向と交差する方向に配置された棒状部材50と、棒状部材50とともに棒状部材50を中心軸として回転可能とされ、第1及び第2のギア10,20と噛み合う第3のギア30と、棒状部材50を中心軸として棒状部材50とは独立に回転可能であって、第1及び第2のギア10,20と噛み合う第4のギア40と、を備えていることを特徴とする。
(もっと読む)
遠隔操作型加工ロボット
【課題】 遠隔操作型アクチュエータを正確な位置に支持することができ、かつ遠隔操作型アクチュエータは細長いパイプ部の先端に設けられた工具の姿勢を遠隔操作で変更することができる遠隔操作型加工ロボットを提供する。
【解決手段】 遠隔操作型アクチュエータ80とその支持装置81とでなる。遠隔操作型アクチュエータ80は、細長形状のスピンドルガイド部3と、このスピンドルガイド部3の先端に先端部材連結部を介して姿勢変更自在に取付けられた先端部材2と、スピンドルガイド部の基端が結合された駆動部ハウジング4aとを備える。先端部材2は、工具1を保持するスピンドルを回転自在に支持する。支持装置81は、ベース部82に対して遠隔操作型アクチュエータ80が1方向の自由度を持つ1自由度機構、または2自由度以上の自由度を持つ多自由度機構からなる。自由度機構を駆動する駆動源84b,87a,89aを設ける。
(もっと読む)
1 - 20 / 81
[ Back to top ]