
Fターム[3C007MT08]の内容
マニピュレータ、ロボット (46,145) | 制御の目的(安全以外) (972) | 複数パターン、変化への対応 (220)
Fターム[3C007MT08]の下位に属するFターム
ワークの状態への対応 (119)
Fターム[3C007MT08]に分類される特許
41 - 60 / 101
制御装置

【課題】ロボットを停止させる条件を容易に設定できる制御装置を得ること。
【解決手段】ロボットの制御を行なう制御装置において、使用者の操作に応じたロボット停止に関する第1の信号を出力する装置内停止指示入力部2と、第1の信号および装置外停止指示入力部4から送られてくる使用者の操作に応じたロボット停止に関する第2の信号がロボット停止条件を満たす場合に、ロボットを停止させるための通常停止信号12を出力する停止制御回路10と、停止制御回路10から通常停止信号12が出力された場合に、ロボットの動作を停止させるコンタクタ制御回路9と、ロボット停止条件を変更する条件変更指示が外部入力されると、条件変更指示に応じた回路となるよう停止制御回路10の回路を変更する停止条件変更部3と、を備える。
(もっと読む)
医療用ロボット、および医療用ロボットのパフォーマンス要求事項を充足する方法
本発明は、医療用ロボット(R)、および医療用ロボット(R)のパフォーマンス要求事項を充足する方法に関する。ロボット(R)は、複数の軸(1〜6)と制御装置(17)とを有する。医療用工具(21〜24)は、ロボット(R)の取付装置(18)に取り付けられ、ロボット(R)の作業領域(30)は、そのロボット(R)がそれら医療用工具(21〜24)のパフォーマンス要求事項を充足するように、特に信頼度の高い技術で制御装置(17)によって設定される。 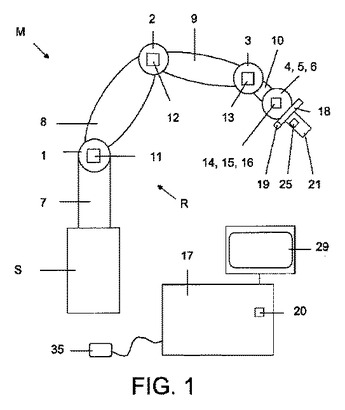 (もっと読む)
(もっと読む)
ロボット及び生産システム

【課題】ワーク搬送路に沿って並ぶ複数の工程エリアに夫々設けられたロボットにより、ワークに対して複数の作業工程を順に実行するものにあって、全体の小型化を図る。
【解決手段】ワークWが搬送されるワーク搬送路13に沿って、ワークWに対する作業を順に行うロボット12を備える複数個の作業ステーション14〜17を配置して生産システム11を構築する。ロボット12を、直線移動レール18の下面側に自在に移動される移動体の下面部にベースを連結し、そのベースの下面に水平旋回アーム21を垂直軸J1を中心に旋回するように取付け、水平旋回アーム21の先端面に昇降体を上下動するように取付け、この昇降体の下面側に手首部を垂直軸を中心に同軸回転するように取付け、手首部にワークWを把持するための作業用ツールを取付けて構成する。
(もっと読む)
ロボット遠隔操作システム
【構成】ロボット遠隔操作システム10は、中央制御装置14を含み、この中央制御装置14は、ロボット12からの呼出要求があると、ロボット12の対話相手から言語および文化を特定するときに、IDLE状態のオペレータを選択する。選択されたオペレータは、操作端末16によってロボット12を遠隔操作する制御コマンドを中央制御装置14に送信する。中央制御装置14は、制御コマンドを受信すると、制御コマンドに含まれる動作コマンドを対話相手の文化に対応する動作に変換し、発話コマンドを対話相手の使う言語に翻訳して、ロボット12に送信する。すると、ロボット12は、対話相手の文化に併せてコミュニケーション行動を行う。
【効果】対話相手の文化に併せてロボット12がコミュニケーション行動を行うため、対話相手の文化によらず、オペレータが適切に対応することができる。
(もっと読む)
停止監視機能を備えたロボット制御装置
【課題】ロボット又は装置毎に動力供給を接続・遮断するためのハードウェア等を使用することなく、一方で作業者の安全を確保できる停止監視機能を備えたロボット制御装置を提供する。
【解決手段】CPU38は、各サーボモータからの位置情報に基づくロボット又は協働作業装置の位置と、侵入通知の状態とを周期的に監視し、侵入通知が最初に入力された時に、その侵入通知が割り付けられているロボット又は協働作業装置のサーボモータの位置をRAM40内に記憶する。その後、その侵入通知が入力されている間は、RAM40内に記憶された位置と、現在のサーボモータの位置との距離を計算し、その距離が許容移動距離よりも大きい場合には、非常停止手段28に指令を出し、ロボット14及び協働作業装置16の全てのサーボモータ18、20の動力を遮断する。
(もっと読む)
マニピュレータ
【課題】アクチュエータ部と作業部を装着した際、迅速に使用準備が完了されるマニピュレータを提供する。
【解決手段】マニピュレータ10は、アクチュエータブロック30と、アクチュエータブロック30に対して着脱自在な作業部16と、作業部16の動作を制御するコントローラ514と、個体識別用の個体信号を保持するバーコード104と、バーコード104に対して非接触で前記個体信号を認識し前記コントローラ514へ供給するカメラ106と、アクチュエータブロック30及び接続部15を係合させる係合部210及び係合片200とを備える。さらに、接続部15には、ロッキングプレート304、コイルスプリング306及びプーリ収納体300を備え、コイルスプリング306により弾性支持されるロッキングプレート304にバーコード104が設けられる。
(もっと読む)
ロボットの動作余裕量演算表示方法及びその装置
【課題】ロボットの動作可能な領域をオペレータや生産ラインの現場作業者に対して直感的に認識できる態様で定量的に通知する。
【解決手段】ロボット1の教示プログラムに含まれる複数の教示点のそれぞれについて、ロボット1の位置姿勢を示す複数のパラメータのうちの1個又は複数個を変化させて、ロボット1の各関節θ1〜θ6の動作範囲内で教示点から連続して動作可能な領域を示す動作余裕量を計算する(ステップS2−2)。各教示点の動作余裕量を数値で定量的に表示する(ステップS2−3)。
(もっと読む)
脚式ロボット、及びその制御方法
【課題】最も安定性の高い歩行・走行軌道を実現しつつ、足先の接地位置が接地禁止領域に重なることを防止して、計算の高速化と柔軟な運脚を実現する脚式ロボット及びその制御方法を提供することを目的とする。
【解決手段】本発明にかかる脚式ロボットは、周期動作における重心軌道を生成する軌道生成手段と、脚式ロボットの状態と、指定する移動速度に基づいて、生成された周期動作の重心軌道を更新する軌道更新手段と、更新された重心軌道に基づいて、関節角の目標値の経時的データを計算する軌道再生手段と、計算された関節角の目標値の経時的データに基づいて、関節角を変更する関節駆動手段と、を備え、軌道更新手段は、更新後の重心軌道に応じた足先接地位置が、足先の接地が禁止される接地禁止領域に重なる場合に、足先接地位置が接地禁止領域に重ならないように、更新後の重心軌道を修正する。
(もっと読む)
パワーアシスト装置およびその制御方法
【課題】パワーアシスト装置によるワークの搬送効率や、パワーアシスト装置を用いてワークを組み付ける場合の位置決め精度を改善するために、搬送途中におけるワークの姿勢を安定させるとともに、作業者による微妙な位置決めを可能とするパワーアシスト装置およびその制御方法を提供する。
【解決手段】接圧センサ3e・3e・・・により、ウィンドウ10に作用する押圧力Fe1〜Fe4を検知し、検知結果を制御装置5に入力する第一押圧力検知工程と、制御装置5により、検知した押圧力Fe1〜Fe4が、予め設定した第一閾値Fcを越えているか否かを判定する押圧力判定工程と、制御装置5により、デッドマンスイッチ6・6・・・が入状態であるか否かを判定するデッドマンスイッチ判定工程と、制御装置5により、第一押圧力検知工程と押圧力判定工程とデッドマンスイッチ判定工程の各結果からフリージョイント4の回転規制を解除するか否かを判定する。
(もっと読む)
半導体搬送装置
【課題】安全かつ簡易な構成の半導体搬送装置のメンテナンスにおいて行うロボット遠隔教示作業のインターロック系統切替機構を備えた半導体搬送装置を提供する。
【解決手段】点検調整用の開口部10と、この開口部10を蔽う開閉自在のカバー2と、このカバー2が開状態のときインターロック3が作動し、装置の駆動を停止させるインターロック回路3と、を備えた搬送用ロボットによって半導体試料を搬送する半導体搬送装置1であって、さらに、カバー2が開状態のときに、操作できるキースイッチ4を有し、キースイッチ4は、ノーマルモードNとメンテナンスモードMを選択することができ、ノーマルモードNは、インターロック3を有効とし、メンテナンスモードMは、インターロック3を無効にするとともに、さらに搬送ロボットの搬送位置を調整する遠隔教示用のティーチングペンダント5の使用を有効とさせる構成とした。
(もっと読む)
ノズル
【課題】実装ヘッドに装着することなく識別が可能なノズルを提供する。
【解決手段】実装ヘッド7に対して装着および離脱可能なノズル3であって、実装ヘッド7に取り付けられる取付部3aと、部品を吸着して保持する吸着部3bと、取付部3aと吸着部3bの間に設けられて吸着部3b側に反射面が設けられたフランジ部3cを備え、フランジ部3cの取付部3a側に、光によって識別される二次元コード30、32を刻印加工するとともに二次元コード30、32を囲繞する領域を平滑加工した。
(もっと読む)
脚式移動ロボット及びその制御方法
【課題】凹凸がある地面であっても安定して移動が可能な脚式移動ロボット及びその制御方法を提供すること。
【解決手段】脚式移動ロボット1は、目標とする目標体幹加速度と現在の体幹加速度との偏差である加速度偏差を算出する体幹歩容データ補正演算部112と、目標とする目標重心位置と現在の重心位置との偏差である重心位置偏差を算出し、その重心位置偏差と、前記の加速度偏差により歩容データ目標値を補正する補正量変更部116とを有する。
(もっと読む)
ワーク搬送用ロボットの制御装置
【課題】ロボットの教示作業を効率的に、かつ安全に行うことができるワーク搬送用ロボットの制御装置を提供する。
【解決手段】ロボットハンド12の手動ジョグ送り方向を規定する所定の手動ジョグ送り座標系を記憶する座標系記憶手段2と、工作機械に対して、ロボット制御装置に記憶された手動ジョグ送り座標系のうち1つの座標系が割り当てられた空間領域を設定する空間領域設定手段3と、ロボットハンド12の現在位置を所定のサンプリング周期毎に取得するハンド位置取得手段4と、ハンド位置取得手段4により取得されたロボットハンド12が、空間領域設定手段3により設定された空間領域内にあるか否かを判定する判定手段5と、判定手段5によりロボットハンド12の位置が空間領域内にあると判定された場合に、ロボット11の手動ジョグ送り座標系を空間領域に関連付けされた手動ジョグ送り座標系に自動的に切り替える座標系切替手段6と、を備えている。
(もっと読む)
ロボット教示システム
【課題】ワークが替わるたびにプログラムを新たに作り直す必要がなく、ロボットの教示作業に必要な時間を短縮することができるロボット教示システムを提供する。
【解決手段】ロボット教示システム10は、ロボット11と、ロボットコントローラ12と、ロボット11に取付自在のツール13と、ロボットコントローラ12を制御する制御部20とを備えている。制御部20は、ワーク固有データ30が入力される入力部21と、ロボット11の種類およびツール13の種類を指定する作業指定部22と、作業指定部22からの情報に基づいてロボット制御用中間言語31を作成する中間言語作成部23とを有している。最終言語作成部24において、ワーク固有データ30とロボット制御用中間言語31とに基づいてロボット制御用最終言語32が作成され、出力部25を介してロボットコントローラ12へ送られる。
(もっと読む)
ロボット用ハンド
【課題】搬送物を多段に収納する収納ラックの高さを増大させることなく、収納ラックの各段の搬送物に対するフォークの意図しない当接を回避しながら搬送物の載置または取り出しを行うことが可能なロボット用ハンドを提供する。
【解決手段】このロボット用ハンド6は、先端部へ向かって上向きに傾斜して延びるように配置されるフォーク10を備え、そのフォーク10上に搬送物としてのガラス基板100を載せて搬送するものであって、フォーク10には、その基端部側の第1位置P1と、この第1位置P1よりも先端部側の第2位置P2とに移動可能な加重部材13が設けられている。
(もっと読む)
ロボットおよびロボットの制御方法
【課題】ドアを開けて出入口を通過することができるロボットおよびその制御方法を提供する。
【解決手段】制御手段は、次の工程を順に実行する。係合部30をドア取手101に係合させた状態で、走行体10の後退とロボットアーム20によるドア引き寄せ制御を実行し、ドア100を開く。この際、ドアの手先側の側縁100bがドアの回動中心と走行体10のドア側の側面の前端部10xとを結ぶ線を通過する。図3(B)〜(D)参照。次に、係合部30のドア取手101に対する係合状態を維持しながら、走行体10の旋回と前進を実行することにより、走行体10の前端部10xを、ドア100の回動軌跡と干渉する領域に位置させる。図3(E)参照。次に、係合部30のドア取手101に対する係合状態を解除する。図3(F)参照。次に、走行体10を前進させて出入口201を通過させる。図3(I),(J)参照。
(もっと読む)
ロボット、ロボット用伝送路に使用される基準電圧生成回路ならびに基準電圧生成回路を有するハブ装置。
【課題】ロボットの制御装置がRS485方式対応であっても、RS485方式とTTL方式のサーボ装置とを混在して使用できるようにする。
【解決手段】制御装置とアクチュエータしてのサーボ装置を有するロボットにおいて、RS485方式で制御する制御装置20とサーボ装置10,31間の伝送路15に電源電圧生成回路30を配設した。この電源電圧生成回路30によって差動信号の一方の信号(反転信号)をHレベルとLレベルの間の一定電位に保持するようにした。その結果、電源電圧生成回路としてはツェナーダイオードや抵抗分圧回路を使用する。電源電圧生成回路は、伝送路の途中だけでなく、伝送路を分岐するハブ装置や制御装置内に組み込むこともできる。
(もっと読む)
把持装置の把持制御装置
【課題】 外力を検知するための専用のセンサを必要とせず、構造を簡単化し、製作コストの低減を図ることができる把持装置の把持制御装置を提供する。
【解決手段】 モータ回転角度の変化と電流検出値とから可動部に作用する外力を推定し、この推定外力が設定範囲になると位置制御を止めて電流制御手段14により、把持力付与用設定電流値19で電流制御を行わせる。
(もっと読む)
パワーアシスト装置及びその制御方法
【課題】直感的な操作感でワークの位置と姿勢を制御できるパワーアシスト装置を提供する。
【解決手段】作業者1が対象物であるウィンドウ2を搬送する作業を補助するパワーアシスト装置50であって、複数の関節3aを有するロボットアーム3と、前記ロボットアーム3にフリージョイント4を介して3次元的に揺動可能に連結され、前記ウィンドウ2を保持する保持手段である吸着治具5と、前記関節3a及び前記フリージョイント4の角度を検出する角度検出手段であるエンコーダ10と、前記吸着治具5に設置され、該吸着治具5にかかるモーメントを検出する力センサと、前記吸着治具5に設けられ、前記力センサにモーメントを加えながら吸着治具5を操作可能であるハンドル6と、前記力センサで検出したモーメントに基づいて前記ロボットアーム3における前記吸着治具5との接続部の移動速度となる手先速度を制御する制御手段8と、を備えた。
(もっと読む)
協調ロボットを協調させる方法
【課題】協調ロボットを協調させる方法を提供する。
【解決手段】本発明方法は下記のステップを含む。ある環境中にまたはロボットの内部に配置されたセンサによって異常なイベントが検知される。異常なイベントは協調ロボットに送信される。各ロボットは、異常なイベントの優先度が現在実行中のタスクの優先度よりも高いか否かを判定する。判定が「YES」である場合には、ロボットの関数属性が異常なイベントの属性を満たすか否かが次いで判定される。協調ロボットの関数属性が異常なイベントの属性を満たさない場合には、ロボットは他のロボットからの支援を得るために送信し、これによって即座に指定されたタスクチームを構成する。即座に指定されたタスクチームは異常なイベントが発生している場所に行って、異常なイベントを処理する。異常なイベントが排除された後に、即座に指定されたタスクチームは解散しおよびこれらロボットは元のタスクを再開する。
(もっと読む)
41 - 60 / 101
[ Back to top ]