
Fターム[3C007NS09]の内容
マニピュレータ、ロボット (46,145) | ワークの状態 (1,085) | 形状 (232) | 板状体、円盤 (107)
Fターム[3C007NS09]に分類される特許
1 - 20 / 107
板状ワークの取扱方法
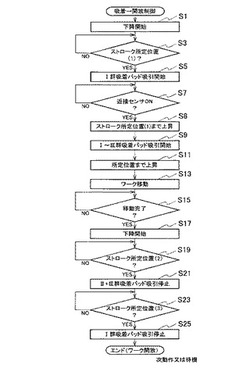
【課題】 切断後の板状ワークをより円滑に持ち上げることのできる、板状ワークの取扱方法を提供すること。
【解決手段】 板状ワークの取扱方法は、面状に配列された複数の吸着パッドで吸引して板状ワークを取り扱う。板状ワークの取扱方法では、複数の前記吸着パッドを前記板状ワークに向けて降下させると共に、複数の前記吸着パッドのうちの第1領域内の吸着パッドでの吸引を開始し、複数の前記吸着パッドが前記板状ワーク面に達した時又は達した後に、複数の前記吸着パッドのうちの前記第1領域よりも広い第2領域内の吸着パッドでの吸引を開始し、複数の前記吸着パッドを上昇させて前記板状ワークを持ち上げる。
(もっと読む)
長尺材曲げ加工用のロボットハンドおよび長尺材曲げ加工システム

【課題】吸着手段とグリッパとを備えたローディングが可能な長尺材用ロボットハンドの提供と、このロボットハンドを使用した長尺板材曲げ加工システムの提供。
【解決手段】1.ロボットハンド15に吸着手段31とワークの長手方向両端部を把持するグリッパ51とを設け、前記吸着手段をワークの前後方向に移動位置決め可能に設けたことを特徴とする長尺板材曲げ加工用ロボットハンド。2.板材折曲げ加工機へワークを供給するロボットと、掴み換え装置とを備えた長尺板材曲げ加工システムにおいて、前記ロボットハンドがロボットハンド15に吸着手段31とワークの長手方向両端部を把持するグリッパ51とを設け、吸着手段をワークの前後方向に移動位置決め可能に設けてなるこ長尺板材曲げ加工システム。
(もっと読む)
搬送ハンド
【課題】中央部分が中空のワークであっても、確実に搬送できるとともに、設備を簡素化できる搬送ハンドを提供すること。
【解決手段】第1把持部11、第2把持部12、第3把持部13及び第4把持部14は、複数のバルブガイドWa又はバルブシートWbを把持して搬送し、略半円形状の外壁101aと略半円形状の内壁101bを有する一対の把持手段101と、一対の把持手段101を相互に近接又は離間させる押圧手段102と、を備え、これら一対の把持手段101は、押圧手段102により近接されることで内壁101bによってバルブガイドWaを把持し又は押圧手段102により離間されることで外壁101aによってバルブシートWbを把持し、複数のバルブガイドWa又はバルブシートWbの配列方向に沿って、複数連接されている。
(もっと読む)
支持装置及び支持方法
【課題】凸部が設けられた半導体ウエハ等の板状部材を支持して搬送する際に、当該支持の安定化を図ることができ、凸部に接触する接触面を当該凸部から簡単に切り離すことができるようにすること。
【解決手段】凸部W1が設けられた半導体ウエハWの支持装置12であり、当該装置は、凸部W1の先端に接触可能な接触体26と、半導体ウエハWに吸引力を付与する吸引手段30とを含む。接触体26は、接触面26A側に貫通する吸引口40を備えた自粘性を有する材料によって構成されている。接触体26を無負荷状態で断面視したときに、接触面26Aは、吸引口40に向かって先細となる形状をなす。接触面26Aは、半導体ウエハWを支持したときに、凸部W1の先端面形状に合わせて変形可能に設けられる。
(もっと読む)
ワーク搬出入装置及び乾燥処理装置
【課題】ワークの搬出入を容易に行うことのできるワーク搬出入装置及び乾燥処理装置を提供する。
【解決手段】操作部4と、荷重バランサー装置5と、を有し、操作部4は、エアレギュレータが搭載された箱体状の操作本体6と、操作本体6の前面側に設けられた長尺な棒状のアーム部材7と、固定機構8と、一対の把持部材10とを有している。アーム部材7は、ワーク3の内周面に挿入されることで、ワーク3を保持可能であって、その保持されたワーク3を軸方向に沿ってスライド可能に構成されている。
(もっと読む)
搬送装置
【課題】搬送装置の重量を軽減する。
【解決手段】本搬送装置1の前記カムリング20は、それぞれ複数のカム溝形成部分22と前記カム溝形成部分同士を連結する連結部分23とからなり、前記カム溝21はカムリング20の半径方向に対して傾斜して設けられ、前記カム溝形成部分22は前記カム溝21に合わせて半径方向に傾斜した形状であり、前記連結部分23は前記傾斜部よりも幅狭に形成されている。また、前記カムリング20をスタンド10に回転自在に保持する複数のカムリング保持部を、前記カムリングの前記連結部分23と前記支持体とのそれぞれの対向面に有する。
(もっと読む)
ピックアップ装置
【課題】板状体の大きさや形状に簡単に対応させることができ、しかも、スルーホールを有する板状体であっても確実に吸着させる。
【解決手段】板状体4を吸着させてピックアップするピックアップ装置を構成する際、表面に複数の吸着口24を有する第一の吸着ユニット21と、第一の吸着ユニット21の左右に設けられ、表面に複数の吸着口24を有する複数の第二の吸着ユニット22と、第二の吸着ユニット22をスライドレール31に沿って離間させるためのリードスクリュー32を備えるようにする。そして、リードスクリュー32のネジ山を、第一の吸着ユニット21に対してそれぞれ逆方向に設定し、リードスクリュー32をモーター33で回転させることによって、第二の吸着ユニット22を同時に離間させる。
(もっと読む)
支持装置および支持方法ならびに搬送装置および搬送方法
【課題】支持姿勢や搬送動作にかかわらず板状部材の撓みを抑制できる支持装置および支持方法ならびに搬送装置および搬送方法を提供すること。
【解決手段】接着シートMSが貼付された板状部材Wの搬送装置1は、接着シートMSを介して板状部材Wを保持する保持手段2と、保持手段2で保持された板状部材Wを付勢して板状部材Wの面位置を所定位置に維持する面位置維持手段6と、保持手段2を移動させる移動手段3とを備え、面位置維持手段6は、板状部材Wを一方側に付勢するかまたは他方側に付勢することで、板状部材Wの支持姿勢や搬送動作にかかわらず板状部材Wの面位置を維持することができる。
(もっと読む)
把持装置
【課題】クランプ部により薄板状物をクランプする際の衝撃を緩和しながら、位置検出器を用いることに起因する電磁アクチュエータの構成の複雑化を抑制することが可能な把持装置を提供する。
【解決手段】この電磁グリッパ(把持装置)100は、ウエハ9をクランプする方向に移動する可動部25を含むクランプ部24と、クランプ部24の可動部25をクランプする方向に常時付勢するばね部材30と、少なくともクランプ解除状態からクランプ状態に移行する際に推力を発生させる電磁アクチュエータ22とを備える。また、電磁アクチュエータ22は、クランプ解除状態からクランプ状態に移行する際に、ばね部材30のクランプ方向への付勢力による可動部25の移動速度を低減する方向に推力を発生させる励磁コイル27a〜27cを有する励磁回路28を含む。
(もっと読む)
非接触保持装置
【課題】ワークを保持するために装置が必要とする空間を、保持面が移動する方向において縮小する非接触搬送装置を提供する。
【解決手段】非接触搬送装置10は、ワークWを保持する保持部材12と保持部材12が装着される装着プレート11とを有している。保持部材12は、ワークWに臨む流出面12aと、流出面12aに開口する旋回室と、旋回室に圧縮空気を導入する導入孔とを有している。一方、装着プレート11は、相対向する装着面15aと裏面15bとを繋ぐ外側面15cを有するプレート本体15と、気体供給源13からの圧縮空気が流れる気体流路と、気体流路の経路上に設けられ装着面15aに開口し、該気体流路と保持部材12の導入孔とが連通するかたちに保持部材12が嵌入される嵌入孔とを有している。装着プレート11の気体流路には、プレート本体15の外側面15cに設けられた供給ポート19を介して圧縮空気が供給される。
(もっと読む)
小片部材の運搬装置およびその運搬方法
【課題】小片部材を浮上させて安定保持し運搬すること出来る運搬装置およびその運搬方法を提供する。
【解決手段】気体の噴出により小片部材を浮上させて所定の位置へ運搬する小片部材の運搬装置であって、小片部材の外周近傍を小片部材の厚さ方向に移動可能に配置されるとともに先端付近の側面に設ける気体噴出孔を有する気体噴出体と、気体噴出体を小片部材の外周部の近傍に移動させた状態において、気体噴出孔から小片部材の下面側に気体を噴出して小片部材を浮上させる小片部材浮上手段と、気体噴出体により小片部材を浮上支持した状態で気体噴出体を所定の位置に移動させることにより小片部材を所定の位置に運搬する運搬手段と、所定の位置で噴出する気体を停止して小片部材を落下させる小片部材落下手段とを備える。
(もっと読む)
アンパッカー装置
【課題】アンパッカー装置による素ガラス投入において、合紙が外れることを防いで動作異常のないアンパッカー装置を提供する。
【解決手段】素ガラス基板と合紙が交互に積み重ねられたデンスパックから素ガラス基板を取り出すアンパッカー装置であって、素ガラス基板を真空吸着する素ガラス基板吸着手段と、合紙を真空吸着する合紙吸着手段と、ガラス基板吸着手段を駆動する駆動手段Aと、合紙吸着手段を駆動する駆動手段Bと、駆動手段Aと駆動手段Bを制御する制御手段と、を備え、更に、合紙吸着手段には、ミストを噴射するミスト噴射ノズルと、合紙を押し当てる加熱された金属バーと、を備えたことを特徴とするアンパッカー装置。
(もっと読む)
基板の移載装置、およびその方法
【課題】ベルヌーイチャックで基板を吸引保持するときのハンド部の位置精度を緩やかなものとしながら、吸引保持した基板の位置決めを基板自身で自動的に行なって、非接触状態での基板の移載を高速度で能率よく行なえる移載装置を提供する。
【解決手段】パラレルメカニズムのハンド部に、基板を非接触状態で吸引保持するベルヌーイチャックと、基板を位置決めする複数個のガイド体とを設ける。基板を吸引する際には、吸引開始位置におけるベルヌーイチャックをハンド部で位置保持して、ガイド体が基板の外郭線の外に位置する状態にして基板を吸引保持する。吸引保持された基板を、ノズル穴から吹き出される空気流で一方向へ旋回させ、旋回変位する基板の辺部をガイド体で受け止めて位置決めする。以上により、基板を吸引保持するときのハンド部の位置精度を緩やかにできる。さらに、吸引保持した基板の位置決めを基板自身で自動的に行なえる。
(もっと読む)
基板搬送アーム
【課題】基板を吸着パッドにより下側に保持して搬送し、基板を真空吸着して保持するワークステージ上に載置するための基板搬送アームにおいて、搬送アームの移動中に基板が吸着パッドから外れたとしても、簡便な手段により落下することを防止する。
【解決手段】複数の吸着パッド1を備え、基板を真空吸着し下側に保持して搬送する基板搬送アーム10において、回転軸部により回転可能に取り付けられた腕部と、該腕部に取り付けられ該周縁の吸着パッド1の下側に突出する捕手部と、該腕部の先端に位置する滑走部からなる、一対の落下防止具20、20が、前記複数の吸着パッド1のうち、周縁に位置する吸着パッド1の一部に隣接して配置されていることを特徴とする。
(もっと読む)
板状部材の搬送装置及び搬送方法
【課題】搬送条件に応じて正圧吸引と負圧吸引との少なくとも一方を使用して板状部材を支持することができるようにすること。
【解決手段】搬送装置10は、ウエハWを厚さ方向両側から挟み込む位置に設けられた第1及び第2の支持手段11、12と、これらの支持手段11、12を移動可能に設けられた移動手段13とを備えて構成されている。第1の支持手段11は、気体を吸引することでウエハWを吸引して支持する負圧吸引手段16を備えている。第2の支持手段12は、ウエハWに気体を噴出することで当該ウエハWを吸引して支持する正圧吸引手段28を備えている。
(もっと読む)
板状部材の搬送装置及び搬送方法
【課題】搬送中の板状部材において、支持手段により支持される面と反対側の面に接触しないようにしつつ、板状部材が支持手段に対して移動することを防止できるようにすること。
【解決手段】搬送装置10は、ウエハWの一方の面側から当該ウエハWを吸引支持可能に設けられた支持手段11と、この支持手段11を移動可能に設けられた移動手段12と、支持手段11に支持されたウエハWの他方の面側から離れて位置し、支持手段11の吸引支持を補助可能に設けられた補助手段13とを備えて構成されている。補助手段13は、ウエハWに気体を噴出することでウエハWを支持手段11側に付勢可能に設けられ、支持手段11による吸引力を一定としても、ウエハWの支持力を増大できる。
(もっと読む)
搬送ハンド装置
【課題】板材の搬送において、当該板材との干渉を抑制し、所定位置に正確に板材を配設することのできる搬送ハンド装置を提供すること。
【解決手段】搬送ハンド50が、板材82をマグネット部54の電磁石62により吸着して母材84上にある所定の溶接位置へと搬送した後、当該所定の溶接位置より所定間隔空けた真上位置で当該板材の吸着を解除することでマグネット部及びガイド部58により板材の姿勢を保持しつつ当該所定の溶接位置に当該板材を落下させて配設する。
(もっと読む)
板状部材の搬送装置及び搬送方法
【課題】単一の支持部材において必要に応じて正圧吸引と負圧吸引とを切り替えて板状部材を支持することができるようにすること。
【解決手段】搬送装置10は、ウエハWの一方の面側から当該ウエハWを吸引支持可能に設けられた支持手段11と、この支持手段11を移動可能に設けられた移動手段12とを備えて構成されている。支持手段11は、単一のアーム部材15と、この単一のアーム部材15に設けられた負圧吸引手段16及び正圧吸引手段17とを備えている。負圧吸引手段16は、気体を吸引することでウエハWを吸引支持可能に設けられる。正圧吸引手段17は、ウエハWの一方の面に気体を噴出することによりウエハWを吸引支持可能に設けられる。
(もっと読む)
部材ハンドリング装置
【課題】平置きされた種々の形状をなす部材を倒立させ次の工程へと円滑に受け渡しすることのできる部材ハンドリング装置を提供すること。
【解決手段】倒立用ロボットの第2アーム先端に、一平面に複数の電磁石36の配設されたマグネットハンド30を設ける。形状の異なる複数の部材のうち最も幅狭な部材よりも小幅な吸着面に形成された電磁石が一平面に複数配設されており、前記部材の形状または重量に応じて選択的に該複数の電磁石のうちの一部または全てを使用して該部材を吸着する。
(もっと読む)
ワーク設置装置とワーク設置方法
【課題】 わずかに位置誤差があってもワーク搬送装置のロボットハンドが被設置部材に干渉することなくワークを把持、搬送することができるとともに、ワークに把持部を設けなくても搬送できるワーク設置装置とワーク設置方法を提供することである。
【解決手段】 3次元的に移動可能な把持機構5に取り付けられ、水平方向に移動可能であり、その間に外周面1bを開放可能に把持可能な複数のツメ部材12と複数のツメ部材12を互いに連動して水平方向に駆動する開閉アクチュエータ14とを備える。ツメ部材12はワーク1の外周面1bを把持する把持面12bと水平な底面1cを支持する支持面12cとを有する。被設置部材2は、上端部に案内テーパ面2bを有しワーク1の外周面1bと嵌合する嵌合部2aと、ワーク1の底面1cを支持する底面支持部2cと、ワーク1が鉛直に下降してその底面1cが底面支持部2cに載る位置まで複数のツメ部材12と干渉しないように設けられた切り欠き溝2dとを有する。
(もっと読む)
1 - 20 / 107
[ Back to top ]