
Fターム[3C030BB01]の内容
Fターム[3C030BB01]の下位に属するFターム
Fターム[3C030BB01]に分類される特許
21 - 40 / 71
倣い機構
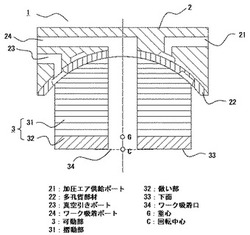
【課題】小さな倣い力で高精度な倣いを実現できる倣い機構を提供する。
【解決手段】摺動保持部2と可動部3との間に、摺動保持部2と摺動部31の磁力による吸着力と、可動部3の自重及び加圧エアによる静圧とを均衡させることにより静圧空気軸受けを形成する倣い機構1において、可動部3の倣い部32を、摺動部31より密度の大きな物質によって構成することにより、可動部3の回転中心Cと可動部3の重心Gを近づける構成とする。
(もっと読む)
組付装置及び組付方法

【課題】設備が巨大化してスペース生産性を悪化させることなく、組付装置の汎用性及び段替性を向上させ、特に、コンロッドの種別に応じて前記組付パレットを効率的に段替えすることが可能となる、組付装置及び組付方法を提供する。
【解決手段】本発明に係る組付装置10は、搬入部21で搬入されるロッドWr及びキャップWcに固有の情報に基づいて、ロッドWr及びキャップWcで形成するコンロッドWの種別を判定し、コンロッドWの種別情報を生成し、該種別情報に基づいて生成した指令信号にしたがって、コンロッドWの種別に対応して順次組付けてコンロッドWを形成し、前記指令信号にしたがって、コンロッドWの種別に対応して前記コンロッドWの種別に対応した種別の専用の組付パレットPを供給し、かつ、前記コンロッドWを搬出した後の前記組付パレットPを収容することで、前記組付パレットPの種別を段替えする。
(もっと読む)
ワーク組付装置およびワーク組付方法
【課題】簡素な構成でワークを被組付部に位置決めできるワーク組付装置を提供すること。
【解決手段】サイドエアバッグ取付装置は、ピン挿通孔が形成されたサイドエアバッグを保持して、ピン挿入穴が形成されたサイドエアバッグ組付部に組み付ける。このサイドエアバッグ取付装置は、ハンド本体51およびこのハンド本体51に設けられた複数のワーク保持装置52を有するハンド50と、ハンド50の姿勢および3次元空間における位置を変化させるロボットアーム41と、これらを制御する制御装置と、を備える。ワーク保持装置52は、筒状のシリンダ53と、このシリンダ53に摺動可能に設けられて、先端がピン形状でありかつ基端側に磁力を有するボス部551が形成されたピン部材55と、ハンド本体51に設けられてシリンダ53をフローティング自在に支持するシリンダ支持部54と、を備える。
(もっと読む)
ドア取り外しシステムおよびドア取り外し方法
【課題】ドアをボディから確実に取り外しできるドア取り外しシステムを提供すること。
【解決手段】ドア取り外しシステムは、自動車のボディ10にボルト12で固定されたドア11を、このボディ10から取り外す。このドア取り外しシステムは、ドア11を把持して搬送可能な双腕ロボットと、ナットランナ71と、双腕ロボットおよびナットランナ71を制御する制御装置と、を備える。制御装置は、双腕ロボットによりドア11を把持し、ナットランナ71のソケットをボルト12に嵌合して、ナットランナ本体によりソケットを所定回転数だけ回転させ、ソケットの後退距離xを測定し、この測定した後退距離xが所定距離以上である場合には、ボルト12が外れたと判定する。
(もっと読む)
軸状部品の供給装置
【課題】 2つの磁石によって確保される吸引力を軸状部品に対してより一層強く作用させることのできる軸状部品の供給装置を提供する。
【解決手段】 頭部2と軸部3を備えた軸状部品1を供給の対象とするものであって、軸状部品1の入口通路17と出口通路19を連通する移送通路20をケース本体13に設け、入口通路17と移送通路20は、軸部通過空間10と頭部通過空間18と滑動面8によって構成され、一時停止箇所22において軸状部品1を進入方向に吸引する第1磁石27と、その軸方向に吸引する第2磁石28が配置され、両磁石の軸部3と頭部2に対する極性が異なった極性に設定されている。これによって、両磁石によって形成される磁力線がループ状になって軸状部品1を通過し、吸引力が強化される。
(もっと読む)
ワークの挿入装置
【課題】ロボットで可撓部を有するワークを挿入孔へ嵌合する技術を提供することを課題とする。
【解決手段】ロボット36で、ワーク10を、矢印(9)の向きに下降させる。曲折した部位67があるため、(b)に示すように、ワークの先端58が挿入孔21の口元22に干渉する。このとき、荷重計測機構42で検出された荷重からワーク10が曲折していることを判別すると共に偏荷重を算出し、これに基づいて、矢印(10)のようにワーク10を移動させ、挿入孔22にワークの一部を挿通させる。(c)に示すように、ロボット36を少し移動させ、曲折した部位67を補正してワーク10を直線状にする。(d)に示すように、ロボット36を移動させ、ワーク10を挿入孔の軸57上に戻し、矢印(12)に示すように移動させ、挿入孔21に挿通する。
【効果】ワークの姿勢にかかわらず、ロボットで可撓部を有するワークを的確に挿入孔に挿通することができる。
(もっと読む)
キーシリンダのタンブラ組付装置
【課題】小型化を図り、高度な駆動精度が要求されることなく、タンブラの組み付けに関する一連の作業を自動化するとともに、作業工程を最小限として作業時間を短縮する。
【解決手段】同一形状のタンブラ6を収容するタンブラ収容箱15A〜15Dと、同一姿勢のタンブラ6を選別して取り出すタンブラ取出装置17と、取り出されたタンブラ6を送出するシュータ27と、送出されたタンブラ6を収容するタンブラカセット28A〜28Dと、タンブラ収容穴3と対応するタンブラ挿入ガイド38A〜38Eと、タンブラカセット28A〜28D内のタンブラ6をタンブラ挿入ガイド38A〜38Eへ供給するタンブラ供給装置40と、キーシリンダ1を移動するキーシリンダ移動装置11と、タンブラ6をタンブラ収容穴3に挿入するタンブラ挿入装置43とを備え、タンブラカセット28A〜28Dとタンブラ挿入ガイド38A〜38Eとを上下方向に配置する。
(もっと読む)
ビス締め付けシステム
【課題】複数のビスを均等にかつ短時間で締め付けできるビス締め付けシステムを提供すること。
【解決手段】ビス締め付けシステム1は、ドアの仮固定用ビス穴に皿ビスが仮締めされて仮固定されたドアロックを、ドアの仮固定用ビス穴を含む複数のビス穴に皿ビスを本締めして本固定する。このビス締め付けシステム1は、ビス締め付け装置2と、ロボットアーム3と、を備える。ビス締め付け装置2は、第1嵌合部21Aと、この第1嵌合部21Aを低速で回転させる低速回転部22Aと、第2嵌合部21Bと、この第2嵌合部21Bを高速で回転させる高速回転部22Bと、を備える。制御部は、第2嵌合部21Bに本固定用の皿ビスが取り付けられた状態で、高速回転部22Bおよび低速回転部22Aを駆動し、第1嵌合部21Aを仮固定用ビス穴の皿ビスに接近させるとともに、第2嵌合部21Bを仮固定用ビス穴以外のビス穴に接近させる。
(もっと読む)
軸状部品の供給装置
【課題】 軸状部品の移動経路を簡素化することができ、空間的に制約された箇所において採用しやすい軸状部品の供給装置を提供する。
【解決手段】 入口開口10と出口開口11が設けられた保持部材8が進退式の供給ロッド6に取り付けられ、保持部材8に入ってきた軸状部品1を一時停止するストッパ手段13が設けられ、軸状部品1を保持部材8の内面に押し付ける保持手段24が設けられ、供給ロッド6の進出後保持部材8から落下して目的箇所に到達した軸状部品1が保持部材8の復帰動作時に保持部材8を相対的に通過できる通過部22が設けられ、この通過部22は供給ロッド6の延長方向の箇所に配置されている。
(もっと読む)
組立装置
【課題】設置面積を縮小し、小型化した組立装置を提供すること。
【解決手段】鏡枠7を支持するステージ3と、鏡枠7に取り付けるレンズ6が配置されたトレイ11と、ステージ3を取り囲んで設けられた側壁21,22,23,24、及び天井壁25と、側壁23に設けられ組立作業に用いる工具が収容された工具棚30と、側壁21に設けられ鏡枠7、レンズ6、及び工具を把持し組立作業を行うマニピュレータ1,2と、を有することを特徴とする組立装置100とした。
(もっと読む)
ギヤシャフト組立て装置及びギヤシャフトの組立て方法
【課題】本願発明は、ギヤシャフトの組立てのタクトタイムが小さく、装置のコストが低く、且つ装置のメンテナンスも容易であるギヤシャフトの組立て装置及びその方法を提供する。
【解決手段】本願発明のギヤシャフト組立て装置は、6軸ロボットとギヤシャフト組立て台からなる。このロボットのハンドは、ギヤ3を押圧する押圧ブラケット53を備え、押圧部53aでギヤを押圧しつつ把持する。このロボットハンドは把持したギヤを、ギヤのシャフト孔に組立て台の固定部42に垂設されたシャフト2に貫通させて、シャフトの備えるスプラインの上部端部に近接状態に配置した後、ギヤをアンクランプし、このハンドを水平回転させる。及び/又は、ギヤシャフト組立て台はロボットハンドと反対方向に水平回転させる。
(もっと読む)
ピストン挿入治具
【課題】ピストン挿入治具において、ピストンを挿入した後においてもピストンの向きを修正することができるようにする。
【解決手段】ベースプレート6に、テーパ状の内面7Aを有するテーパコーン7を回転可能に取付ける。ベースプレート6をシリンダブロックのデッキ面上に位置決めし、テーパコーン7のテーパ状の内面7Aにピストンを挿入する。ピストンを押下げることにより、テーパ状の内面7Aにそってピストンリングが縮径されてピストンがシリンダボアに挿入される。このとき、ピストンは、テーパコーン7に挿入した後でもテーパコーン7と共に回転させて向きを修正することができるので、ピストンリングをこじることがなく、ピストンのシリンダボアへの挿入作業性を向上させることができる。
(もっと読む)
クランクシャフトの油孔栓体圧入機
【課題】昇降用のシリンダを荷重受けプレートの側方に配置することにより、小型化及び作業性に富んだクランクシャフトの油孔栓体圧入機を得る。
【解決手段】油孔(51)が形成されたクランクシャフト(50)を水平に支持するワーク支持ユニット(20)と、ワーク支持ユニット(20)に支持されたクランクシャフト(50)の油孔(51)端部に栓体を圧入する栓体圧入ユニット(40)とを設け、ワーク支持ユニット(20)は、クランクピン(50a)を受ける受け治具(23)に、受け治具(23)の軸方向端面とクランクアーム(50b)との間に嵌合する荷受けプレート(25)を上下動可能に設け、受け治具(23)の側方にプレート昇降装置(27)を設け、プレート昇降装置(27)によって上下動される昇降レバー(28)を荷受けプレート(25)に向けて延出させ、昇降レバー(28)の延出端部を荷受けプレート(25)の下部に係合させる。
(もっと読む)
ニードルローラ整列供給装置及びこれを備えたトリポード部材組立装置
【課題】トリポード部材の脚軸部外周面に複数のニードルローラを効率的に且つ確実に整列供給することができるニードルローラ整列供給装置などを提供する。
【解決手段】ニードルローラ整列供給装置は、第1円筒部材22と、第1円筒部材22内に少なくとも一部分が挿入された状態で配置され、外周面には、ニードルローラ208がそれぞれ収容される複数の溝25aが軸線方向に沿って形成された第2円筒部材24と、第1円筒部材22の先端部よりも脚軸部側に突出するように且つ環状に設けられ、第2円筒部材24の各溝25a内にあるニードルローラ208を溝25a側に押し付けて挟持する挟持機構40と、第1円筒部材22と第2円筒部材24との間に配置される第3円筒部材23と、これら各円筒部材22,23,24を駆動する駆動機構とを備える。
(もっと読む)
圧入嵌合部材およびパイプ製品
【課題】パイプ材の内部に挿入することが容易で、かつ小さい圧力でパイプ材の内部に簡単かつ確実に圧入することができる圧入嵌合部材と、その圧入嵌合部材が圧入嵌合されたパイプ製品の提供する。
【解決手段】パイプ材1にフランジ部3の先端周縁に、面取り高さhと面取り幅wの比w/hが0.3以下、かつ面取り幅wが0.15mm以上の基端側面取り部4と、面取り角が前記基端側面取り部4の面取り角より大きい面取り角の先端側面取り部5を2段に形成する。これにより、基端側面取り部4の屈曲部6の尖り度合いが適度に緩和され、小さい圧力で圧入嵌合部材2をパイプ材1に簡単かつ確実に圧入嵌合することができると共に、面取り部5の挿入案内の働きを効果的に行うことができ、圧入嵌合部材2の先端部をパイプ材1の内部に挿入することが容易となる。
(もっと読む)
艤装部品の溶接構造
【課題】厚板から形成されるフレーム材に、薄板材から形成されるクリップ等の艤装部品を溶接するにあたり、フレーム材同士を溶接する溶接作業と、フレーム材にクリップを溶接する溶接作業とを、共に厚板用の溶接機を用いて行えるようにして、設備費の低減、および作業時間の短縮を図る。
【解決手段】クリップ2に、該クリップ2を形成する薄板材を複数層に積層することで肉厚に形成される肉厚部2bを設け、該肉厚部2bをフレーム材に溶接するように構成した。
(もっと読む)
ロボットハンド
【課題】障害物があっても組付部に被組付体を組み付け可能なロボットハンドを提供する。
【解決手段】組付部と障害物との間の空間内で被組付体27を組付部に組み付けるロボットハンドであって、少なくとも2つの把持部材を相対的にスライド移動して開閉することにより、被組付体27を2つの把持部材で把持するハンド3と、ハンド3を動かして被組付体27を組付部に組み付けるアームと、を備え、アームは、ハンド3に把持された被組付体27を組付部に組み付ける際、ハンド3の2つの把持部材の開閉方向が、被組付体27を空間内に挿入する際の挿入方向と略平行になるようにハンド3の姿勢を制御し、被組付体27を組付部に組み付ける。
(もっと読む)
部品組付装置及び部品組付方法
【課題】コントロールバルブユニットのバルブボディの嵌入孔に、スプール、スプリング及びプラグを確実に嵌入させることが可能な部品組付装置及び部品組付方法を提供する。
【解決手段】ガイドブッシュ7を軸直角方向へ変位させつつ、スプリング5及びプラグ6の各軸心を嵌入孔3の軸心に一致させて、スプリング5及びプラグ6を嵌入孔3に順次嵌入させる。したがって、ガイドブッシュ7とスプール4、スプリング5及びプラグ6とのクリアランスをシビアに設定することが可能になり、スプール4、スプリング5及びプラグ6が嵌入孔3の軸心に対して傾くことを防止して、スプール4、スプリング5及びプラグ6を嵌入孔3に円滑に順次嵌入させることができる。
(もっと読む)
エンジン部品の組み付け方法およびその装置
【課題】シンプルな方法でカムキャップをシリンダヘッドに組み付ける。
【解決手段】カムキャップCをシリンダヘッドWのカム軸受け部Pにボルトによって組み付けるエンジン部品の組み付け方法であって、(1)シリンダヘッドWの所定の位置に取り付けたときに複数のカム軸受け部Pそれぞれに位置する複数の挿入穴12を備えるセットプレート10を該シリンダヘッドWに取り付ける工程と、(2)前記複数の挿入穴12それぞれにカムキャップCを挿入することにより前記複数のカム軸受け部PそれぞれにカムキャップCを配置する工程と、(3)カムキャップCの通し穴Thにボルトを配置する工程と、(4)カムキャップC内のボルトを前記カム軸受け部Pのねじ穴Shに締結する工程と、(5)前記セットプレート10をシリンダヘッドWから取り外す工程とを有する。
(もっと読む)
コンロッド組付け用工具
【課題】エンジンブロック内側からコンロッド本体のボルト孔にコンロッドボルトを挿入するコンロッド組付け用工具を提供する。
【解決手段】工具1は、コンロッドボルト5の頭部5aを保持する保持部1aと、保持部1aからコンロッドボルト5の軸部5bと平行に延出する挿入板部1bを有している。挿入板部1bは、エンジンブロック内に組み込まれた状態のコンロッド本体とエンジンブロックとの隙間にコンロッドボルト5とともに挿入され、引き戻される際にコンロッド本体の側面に摺接されるガイド面1b1を有している。保持部1aは、非円形のコンロッドボルト5の頭部5aを回り止めした状態で受入れる凹部2a1と、ガイド面1b1がコンロッド本体の側面に摺接された際にコンロッドボルト5の軸部5bがボルト孔に対応する位置になるように頭部5aの凹部2a1への挿入量を決定する挿入量決定部2a3を有している。
(もっと読む)
21 - 40 / 71
[ Back to top ]