
Fターム[3C030DA27]の内容
自動組立 (6,729) | 搬送・組立ライン一般 (2,452) | 搬送手段 (637) | 搬送治具 (261)
Fターム[3C030DA27]の下位に属するFターム
パレットによるもの (123)
Fターム[3C030DA27]に分類される特許
1 - 20 / 138
車体組立システム
自動車組立設備及び自動車組立方法
【課題】サイクルタイムの延長を招くことなく、空になった台車を排出位置まで返送する。
【解決手段】リフタ20に、第1の台車31を牽引するための牽引手段(係合部40)を設け、次に組み付ける部品E’を搭載した新たな台車31’の下方に昇降台21を配置したときに、牽引手段で牽引された第1の台車31を、リフタ20の移動経路から排出する排出位置に配置するようにした。
(もっと読む)
自動組立装置

【課題】搬送中のワークに部品を組み付けることのできる自動組立装置を提供する。
【解決手段】ワーク12を水平方向に搬送する搬送手段30、31と、搬送手段30、31で搬送されているワーク12の上方へ被挿入部品13を供給する供給手段40、41と、搬送手段30、31で搬送されているワーク12および供給手段40、41で供給された被挿入部品13のうち少なくとも一方を上下方向に移動させる上下駆動手段33とを備え、供給手段40、41は、被挿入部品13をワーク12の搬送方向に取り出すことのできるように開放された開放部413を有し、搬送手段30、31でワーク12を水平方向に搬送しながら上下駆動手段33でワーク12を被挿入部品13に挿入させることで、ワーク12で被挿入部品13を引っ掛けて開放部413から引き出し、開放部413から引き出された被挿入部品13をワーク12に自重落下させる。
(もっと読む)
レンズ保持用ラックおよびレンズ製造方法
【課題】レンズ基材を装着するときに、レンズ基材のレンズ光学面を傷つけるおそれのない作業性に優れたレンズ保持用ラックおよびレンズ製造方法を提供する。
【解決手段】レンズ保持用ラック1は、レンズ基材をレンズ装着位置に位置規制する下方保持部材10、側方回動保持部材20および側方固定保持部材30と、側方回動保持部材を押圧可能な付勢部材22と、を有するレンズ保持ユニットを備える。側方回動保持部材20は、レンズ基材を保持しない状態では、付勢部材22から離間することによりその付勢力を受けることなく、自身の重量のバランスによりレンズ装着位置から外れた待機位置に退避し、レンズ基材を保持する状態では、付勢部材22に接触することによりその付勢力を受けてレンズ基材の外周部に接触する。
(もっと読む)
ワーク位置決め装置およびそれを用いた生産システム
【課題】本発明は、1つの機種で構成され、加工エリアのフットプリントを小さくできるワーク位置決め装置を用いた生産システムを提供する。
【解決手段】水平方向に可動する第1の移動装置と、垂直方向に可動する第2の移動装置と、前記第2の移動装置の上端または下端のいずれか一方に備えられた回転装置を備え、前記第1の移動装置の移動方向に水平面内で直交する幅に、前記第2の移動装置および前記回転装置が収められたものである。
(もっと読む)
部品組立システム
【課題】自動化された部品組立システムにおいて、搬送台車の走行スペースを削減する。
【解決手段】主部品6を搬送する主部品搬送台車3が走行する主搬送路1から、副部品12を搭載して移動する副部品搬送台車4の部品投入路2を分岐・合流させる。副部品搬送台車4により、副部品12を組立ステーション9のストッカ17に補充するときは、副部品搬送台車4を部品投入路2に分岐させて、集中部品庫38から副部品12を積み込んだ後、主搬送路1へ合流させて目的の組立ステーション9へ運ぶ。
(もっと読む)
ロボットセル
【課題】複数のロボットステーションを組み合わせて構築したロボットセルにおいて、各ロボットステーションのスペース効率の改善、タクトの向上、ロボットステーション内の機材の使用効率の改善を目的とする。
【解決手段】ロボットステーションは、一対のロボットアーム101,102と、ロボットアームのワークスペースに対して撮像面を平行に撮像手段を固定するブース104を備える。撮像手段としてのカメラ106の視野を、隣接するロボットステーションのワークスペースである架台の天盤103aまで広げる。さらに、各ロボットステーションに搭載されるロボットアームの可動範囲を、隣接するロボットステーションのワークスペース内に広げる。
(もっと読む)
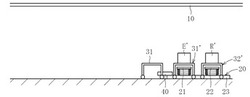
サイドメンバ組立ライン
【課題】サイドメンバの組立ラインを簡素化し、異なる車種のサイドメンバの組立を一本の組立ラインで行うことを可能とする。
【解決手段】本発明に係るサイドメンバ組立ライン100は、アウタパネル2にエクステンション4(中間部品)及びクウォーターインナ5(インナ部品)を完成品と同様の状態で仮組して仮組体1’を構成する仮組ステーション20と、仮組体1’を溶接ステーション30まで搬送する台車10(搬送手段)と、溶接ステーション30において仮組体1’からクウォーターインナ5を取り外すマテハンロボット33(保持手段)と、マテハンロボット33でクウォーターインナ5を取り外した状態で、アウタパネルとエクステンション4とを溶接する溶接ロボット31(第1溶接手段)と、マテハンロボット33でクウォーターインナ5を再びアウタパネル2に装着し、この状態でアウタパネル2とクウォーターインナ5とを溶接する溶接ロボット31(第2溶接手段)とを備える。
(もっと読む)
筒体へのワーク挿入方法及びその装置
【課題】筒体とワークの接触を防止し且つ筒体にワークを適切に挿入するワーク挿入方法及びその装置を提供する。
【解決手段】筒体2の開口2aを横に向けるように筒体2を載置し得る設置部3と、筒体2の開口2aまで移動する補助挿入台車4と、補助挿入台車4に積載され且つワークを保持して補助挿入台車4から筒体2の内部へ移動する挿入台車6とを備える。
(もっと読む)
セル生産システム
【課題】セル生産システムにおいて、簡単な構成により、セル生産の柔軟性を活かしなが
ら作業性の向上を図る。
【解決手段】システム1は、作業者M,M1,M2(代表してM)がワークWと共に移動
しつつワークWに対する処理を行うことによりワークWを製品化する作業を繰り返して製
品を順次生産するためのシステムであり、ワークWを移送するコンベア2と、作業者Mを
認識する検出装置3と、コンベア2を制御する制御装置4と、を備え、制御装置4は検出
装置3による認識結果に基づいてコンベア2の駆動速度を作業者Mごとに変化させる。検
出装置3による作業者Mの認識は、作業者Mの腕に取り付けたデータ送信部5を用いて行
われる。セル生産の柔軟性を活かしながら、コンベア2によるワークWの移動速度を各作
業者Mに合わせることができ、作業時間短縮と作業性向上を実現できる。
(もっと読む)
溶接組付方法
【課題】溶接を施すワークの種類が多岐にわたる製造ラインでの治具の切替を容易にし、低コストで短期間に設定変更ができる生産設備を提供する。
【解決手段】溶接組付ライン100には、台車106の経路107が設定されている。台車106には、治具110が着脱自在に載置される。識別部150は、治具110にセットされたワークの種類を特定する。台車106が進行した後、リフタ112は、ワークがセットされている治具110を持ち上げて保持する。溶接ロボット111は、リフタ112に保持された治具110上のワークに対して、識別部150によって特定されたワークの種類に応じた溶接を施す。溶接後、解放装置113は、ワークを治具110から解放する。マテリアルハンドリングロボット114は、この解放されたワークを取り出す。
(もっと読む)
組付け搬送装置
【課題】精度高く部品を車体に組付け可能な組付け搬送装置を提供する。
【解決手段】組付け搬送装置10は、チェーンコンベア1、ハンガ2、自走台車3、及びロボット4を備える。ハンガ2は、車体Wを懸架し、チェーンコンベア1に牽引される。自走台車3は、ハンガ2と共に車体Wが搭載され、部品組立ラインALを往復動する。ロボット4は、自走台車3と同期して移動する。チェーンコンベア1は、部品組立ラインALの始端部ではハンガ2との係合が解除され、部品組立ラインALの終端部ではハンガ2が再び係合する。これにより、組付け搬送装置10は、部品を車体Wに組付け中は、パワーチェーン12の振動が車体Wに伝達することなく、精度高く部品を車体Wに組付けることができる。
(もっと読む)
自動車組立設備
【課題】自動車組立設備における組付ライン及びサブラインの設計の自由度を高め、設備スペースを縮小する。
【解決手段】サブラインSEにおいて台車10を搬送するサブライン駆動手段と、組付ラインUにおいて台車10を搬送する組付ライン駆動手段(リフタ60)とを別個に設けたことにより、各ラインにおいて台車10の搬送速度や台車間のピッチ、あるいは各ラインのレイアウトを個別に設定することができるため、設備設計の自由度が高められる。
(もっと読む)
ワークの缶組みステージ
【課題】ワークを組み立てて、仮付けを行った後、そのままの状態で次のステージの直近位置までワークを移動させることによって、次のステージへの移載時にワークにダメージを与えないようにする。
【解決手段】ブーム1の缶組み及び仮付けする缶組みステージ10において、ガイドレール21に沿って自走する作業テーブル20にセンタブロック支持部材31及びボス部支持部部材32,33を装着する構成としており、缶組み位置P1において、作業テーブル20にセンタブロック2と、ボス部5,6を支持させて、缶組みされた状態で、作業テーブル20を溶接ステージ11,12と直近位置における移載位置P2まで自走させて、移載させるように構成している。
(もっと読む)
フローラインを操作する方法、組立てトレーラ、牽引棒、組立てトレーラに設置された重機、及びフローライン
本発明は、風車ナセル(3)等の重機の組立てのための2つ以上の組立てステーション(A1,A2,A3,A4,A5,A6)を有するフローライン(1)を操作する方法に関する。この方法は、準備された組立てトレーラ(5,5a,5b,...,5n−2,5n−1,5n)をフローライン(1)において第1の組立てステーション(A1)の前に又は該第1の組立てステーション(A1)に設置するステップと、前記準備された組立てトレーラ(5,5a,5b,...,5n−2,5n−1,5n)を少なくとも1つのフローライン牽引棒(37)に結合するステップと、前記準備された組立てトレーラ(5,5a,5b,...,5n−2,5n−1,5n)が前記第1の組立てステーション(A1)の前に設置されている場合には、前記組立てトレーラ(5,5a,5b,...,5n−2,5n−1,5n)を前記第1の組立てステーション(A1)へ移動させるステップと、その他の場合には、全てのフローライン組立てトレーラ(5,5a,5b,...,5n−2,5n−1,5n)を次の組立てステーション(A1,A2,A3,A4,A5,A6)へ移動させるステップと、を有しており、フローライン組立てトレーラ(5,5a,5b,...,5n−2,5n−1,5n)を移動させるステップが、時間の上で段階的に行われる。本発明は、同じ目的のためのフローライン(1)にも関する。 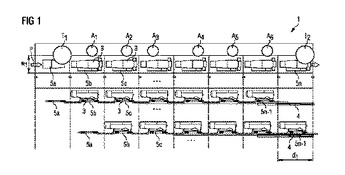 (もっと読む)
(もっと読む)
組立搬送設備
【課題】組立搬送設備を小型化して設備スペースを縮小する。
【解決手段】リフタ24に、幅方向外側に突出可能な可動部(回転アーム70)を設け、この可動部に部品を搭載する。リフタ24から幅方向外側に可動部を突出させることにより、リフタ24の幅方向寸法を超える支持幅で部品を支持することができるため、リフタ24の幅方向寸法を最大の支持幅よりも小さくすることができ、設備の小型化が図られる。
(もっと読む)
接着組立方法、接着組立装置、第1の接着工程用装置及び第2の接着工程用装置
【課題】接着構造で各接着部品の位置決め精度や組み付け品質を必要とする車体等の大型製品の接着による組み付けを確実にするとともに、作業員の作業上の安全を確保する。
【解決手段】作業員104は、移動治具108を有しこの移動治具108に接着剤が塗布された接着部品を保持させた台車103を、工場の床面GLに敷設されるレール102に沿って搬送する。作業員104は、台車103を第1の接着工程用装置201の上方で固定し、固定治具作用部209を上方へスライド移動させる等して接着部品同士を接着する。作業員104は、固定治具作用部209を下方に動かし、第1の接着工程用装置201の固定を解除した後、台車103を第2の接着工程用装置301の上方まで搬送し、そこで固定する。作業員104は、床下作業ピット302に侵入し、作業用開口部312を介して接着部品の下方に食み出た接着剤をかき取る作業を行う。
(もっと読む)
シリンダカバー用反転装置
【課題】エンジンのシリンダカバーを安全にかつ人手を要することなく180°上下に反転させることができるシリンダカバー用反転装置を提供する。
【解決手段】フレーム11には、油圧ジャッキによって上下方向へ位置調節される可動部材を設ける。この可動部材には、回転手段40によって回転させられる回転部材31を設ける。回転部材31には、シリンダカバー2が載置される載置部33を設ける。載置部33には、シリンダカバー2を上下に貫通するロッド挿通孔及びボルト挿通孔に挿通される固定ロッド35a,35b,35cを立設する。シリンダカバー2から上方へ突出した固定ロッド35a,35b,35cの上端部には、固定ナット37を螺合させる。この固定ナット37を締め付けることにより、シリンダカバー2を載置部33に押圧固定する。
(もっと読む)
コンポーネント組立システムおよびコンポーネント組立方法
【課題】高精度でフロントフロアコンポーネントを組み立てできるフロントフロアコンポーネントの組立システムを提供すること。
【解決手段】コンポーネント組立システム1は、セットステーション2と、組立ステーション3と、セットステーション2と組立ステーション3との間で移動する搬送台車30と、セットステーション2の周囲に設けられた3つの供給エリア4〜6と、セットステーション2の周囲に設けられて部品11〜13、21〜23をセットステーション2または組立ステーション3に搬送する搬送ロボット40A、40Bと、組立ステーション3の周囲に設けられて組立ステーション3に位置する部品11〜13、21〜23を加工する溶接ロボット50と、組立ステーション3の周囲に設けられて組立ステーション3に位置する組み立てたフロントフロアコンポーネント10、20を払い出す払出しロボット60と、を備える。
(もっと読む)
生産システム
【課題】生産装置を並べ直すことなく、ワークに対する生産処理の順序の変更に対応可能な生産システムを提供する。
【解決手段】
ワークの生産処理を行う3つ以上の生産装置2〜9と、生産装置のうち、1つの生産装置と他の1つの生産装置に両端部が着脱可能に接続される搬送路11a、12aと、搬送路上を移動して、搬送路が接続された1つの生産装置から他の1つの生産装置にワークを搬送する搬送手段11b、12bと、を備える生産システム1であって、生産装置は、生産処理を行う処理部21と、処理部を内部に備え、略箱状に形成された装置基体28と、を有し、少なくとも1つの装置基体は、互いに交差する2方向X、Yで他の装置基体と接続されている。
(もっと読む)
1 - 20 / 138
[ Back to top ]