
Fターム[3D041AA31]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、目的 (5,475) | 走行性の向上 (1,351)
Fターム[3D041AA31]の下位に属するFターム
Fターム[3D041AA31]に分類される特許
141 - 160 / 352
車両の制動力および駆動力の制御装置
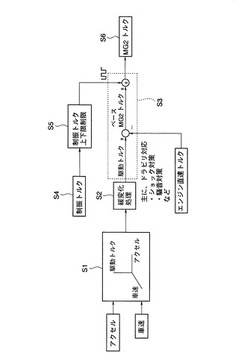
【課題】駆動力源のトルクで車両の振動を抑制する場合に、噛み合い機構で異音が生じることを防止できる車両の制御装置を提供する。
【解決手段】駆動力源と、駆動力源から車輪に至る経路に配置された噛み合い機構とを有し、要求駆動力に基づいて駆動力源のトルクを制御し、かつ、車両の振動を抑制するために駆動力源のトルクを制御することの可能な、車両の制動力および駆動力の制御装置において、要求駆動力から第1トルクを求める要求トルク算出手段と(ステップS1,S2,S3)、車両の振動を抑制する第2トルクを求める振動抑制トルク算出手段(ステップS4,S5)と、第1トルクおよび第2トルクに基づいて第3トルクを求める複合トルク算出手段(ステップS6)と、第1トルクの正負の符号と第3トルクの正負の符号とが異なる場合は符号が同じになるように第2トルクを補正するトルク補正手段(ステップS6)とを備えている。
(もっと読む)
車両駆動装置、およびそれに用いられる車載電子制御装置

【課題】
応答性をより高めた車両駆動装置の提供を課題とする。
【解決手段】
上記課題は、前輪14R,14Lを駆動するエンジン1と、後輪15R,15Lを駆動する直流電動機5と、直流電動機5に駆動電力を供給する駆動専用発電機2と、アクセルの踏み込み情報を含む情報を入力するとともに、駆動専用発電機2から直流電動機5に供給される駆動電力を制御して直流記電動機5の駆動を制御し、さらにはクラッチ4の作動を制御する制御装置とを有する車両において、アクセルが踏み込まれたら、クラッチ4を締結させ、直流電動機5から回転動力を後輪15R,15Lに伝達することにより、解決できる。
(もっと読む)
車両制御装置
【課題】制御演算に用いる横加加速度を、ノイズの増大を招くことなく、また、位相の遅れもさほど生じることなく、精度良く算出することができるとともに、車両が横滑りしているときも精度良く算出することができ、この算出された横加加速度に基づいて車両制御を適切に行うことができるようにされた車両制御装置を提供する。
【解決手段】ロール角速度等の車両状態量を検出する車両状態量検出手段と、車両状態量に基づいて車両の横加加速度を算出する横加加速度算出手段と、横加加速度に基づいて車両制御を行う制御手段とを備える。より具体的な好ましい態様では、横加加速度算出手段15は、前記ロール角速度を入力とする伝達関数Aを用いて前記横加加速度を推定するようにされる。
(もっと読む)
ハイブリッド車両用動力伝達装置
【課題】 可及的に体格の小さい電動機を採用し、車両の小型化、軽量化、低コスト化と共に低燃費を可能にし、快適な車両走行が可能なハイブリッド車両用動力伝達装置を提供すること
【解決手段】 複数の変速段に切換え可能な歯車式有段変速機2と、歯車式有段変速機2と内燃機関1との間に配装され、内燃機関1から歯車式有段変速機2の入力部24への動力の伝達・遮断を切換えるクラッチ3と、クラッチ3の出力側24と歯車式有段変速機2の出力部31、32との間の動力伝達経路内に接続され、出力部31、32へ動力を伝達可能な電動機4と、歯車式有段変速機2の変速操作及びクラッチ3の切換操作を自動制御する制御手段5とを備えるハイブリッド車両用動力伝達装置において、歯車式有段変速機2の変速段に応じて歯車式有段変速機2の出力部31、32と電動機4との回転比が切換えられるようにした。
(もっと読む)
車両挙動制御装置
【課題】車両挙動の統合的な制御において、車両の走行安定化に適した制御を実行する。
【解決手段】マスタである統合ECU111とスレーブであるVSA ECU112とを有する電子制御装置11において、VSA ECU112において、統合ECU111の要求を受け取る要求制限部1122を設けるように構成した。要求制限部1122は、その要求による車両挙動を制御する方向と、VSA ECU112自身が車両挙動を制御する方向とが異なっている場合には、その要求を制限し、VSA ECU112による制御を優先する。
(もっと読む)
路面摩擦係数推定装置
【課題】幅広い運転領域で精度の良い路面摩擦係数の推定ができ汎用性に優れた路面摩擦係数推定装置を提供する。
【解決手段】車両の前後加速度に基づき車輪が発生している発生制駆動力Fdを演算し、車両の駆動源の出力トルクやブレーキの制動力に基づき車輪に付加する推定制駆動力Fmを演算し、発生制駆動力Fdの今回の値と過去の値との発生制駆動力差分値ΔFdと推定制駆動力Fmの今回の値と過去の値との推定制駆動力差分値ΔFmを演算し、発生制駆動力差分値ΔFdと推定制駆動力差分値ΔFmによりパラメータ同定手法を用いてドライビングスティフネス係数Qを推定し、車速Vとドライビングスティフネス係数Qを基に、予め記憶しておいたドライビングスティフネス係数Qと車速Vと路面摩擦係数推定値μEとの関係を示す特性マップを参照して路面摩擦係数推定値μEを設定する。
(もっと読む)
走行制御装置及び車両
【課題】ドライバによる手動操作でも目標加減速度を容易に達成することができる走行制御装置を提供することを課題とする。
【解決手段】少なくとも車両の加減速を制御する走行制御装置であって、誘導目標加減速度に対応するアクセル操作量又はブレーキ操作量のレンジを誘導目標加減速度外に対応するアクセル操作量又はブレーキ操作量のレンジより広く設定する加減速度特性設定手段を備えることを特徴とし、加減速度特性設定手段では、アクセル操作量と当該アクセル操作量に対応する加減速度との関係及びブレーキ操作量と当該ブレーキ操作量に対応する加減速度との関係を規定する基本マップBM1に対して、誘導目標加減速度を達成するための加減速度に対応するアクセル操作量又はブレーキ操作量のレンジを広く設定したマップGM1を生成する。
(もっと読む)
車両のタックイン防止制御装置
【課題】たとえトラクション制御によりスロットル弁が閉側に制御されることがあっても、タックイン現象を的確に防止して違和感を与えることなく自然な制御を行う。
【解決手段】駆動力配分制御部40では、第1のトランスファトルク演算部43で入力トルク感応トランスファトルクを演算し、第2のトランスファトルク演算部44で舵角/ヨーレート感応トランスファトルクを演算し、第3のトランスファトルク演算部45でタックイン防止トランスファトルクを演算する。この第3のトランスファトルク演算部45では、高速旋回時、アクセル開度が大きく閉じられて今回のアクセル開度が小さくなった場合のみならず、トラクション制御部20によるトルクダウン量が設定値より大きい場合においてもタックイン防止制御を実行する。また、横すべり防止制御部30とABS31の少なくとも一方が作動している場合には、タックイン防止制御を禁止する。
(もっと読む)
車両挙動安定化装置
【課題】車両挙動の不安定を検出し、駆動力伝達制御手段により原動機から駆動輪への駆動力伝達を途絶、または駆動力伝達比率を低下させ、駆動輪が発生できるコーナリングフォースを最大限確保することで、アンダーステアを助長したりオーバーステアを誘発したりすることなく、車両挙動を的確に安定化する車両挙動安定化装置を実現する。
【解決手段】車両の挙動不安定を検出する車両挙動不安定検出手段と、原動機出力を制御する原動機制御手段と、前記原動機出力の駆動輪への駆動力伝達を途絶、または駆動力伝達比率を低下させる駆動力伝達制御手段とを備え、前記車両挙動不安定検出手段が車両の挙動不安定を検出した際に、前記駆動力伝達制御手段は、前記原動機出力の駆動輪への駆動力伝達を途絶、または駆動力伝達比率を低下させる。
(もっと読む)
車両自動走行制御装置
【課題】実加速度が目標加速度に対して良好に追従しながら、車両を自動走行させることができる車両自動走行制御装置の提供。
【解決手段】フィードフォワード演算値及びフィードバック演算値の各演算値から目標要求トルクを求める目標要求トルク演算手段31と、その求めた目標要求トルクに基づいて車両を自動走行させるとともに、車両の何れかの車輪がスリップしたときに車輪のスリップを抑制するスリップ抑制制御を実行する自動走行制御手段Dとを備え、目標要求トルク演算手段31は、自動走行制御手段Dによってスリップ抑制制御が実行された場合、目標加速度と実加速度との偏差に基づくフィードバック演算値を保持し、その保持したフィードバック演算値及びフィードフォワード演算値の各演算値から目標要求トルクを求める。
(もっと読む)
車両制御装置
【課題】車輪速度の検出可能最低値(即ち、車輪速度有効速度)を正確に演算する。
【解決手段】車両制御装置は、車体速度が目標速度に維持されるように、車両に対して付与する駆動力及び制動力を制御する車両制御装置であり、車両に備わる複数の車輪の車輪速度を夫々特定する特定手段(41FR、41FL、41RR、及び41RL)と、各車輪に係る所定の車輪速度有効速度を記録する記録手段(52)と、特定される車輪速度の各車輪間での偏差が所定範囲内であるか否かを判定する判定手段(51)とを備える。そして、この判定手段により肯定的な判定結果が得られる場合には、複数の車輪のうち、特定される車輪速度が記憶されている所定の車輪速度有効速度よりも小さい車輪に係る車輪速度有効速度を、当該車輪について特定される車輪速度に基づいて更新する更新手段(51)を更に備える。
(もっと読む)
車両走行制御装置
【課題】運転者による制動操作があった場合に、車両を停止保持することができる車両走行制御装置を提供すること。
【解決手段】車両走行制御装置1では、自動走行制御ECU7において検出された勾配において車両を停止保持することができる勾配目標駆動力Foiおよび検出された車速Vが目標車速Voとなるように算出された基準駆動力から勾配目標駆動力Foiを引いた値であるフィードバック目標駆動力Fofを算出し、エンジンECU8に出力する。エンジンECU8は、算出された勾配目標駆動力Foiおよびフィードバック目標駆動力Fofの合計である目標駆動力Foに基づいてエンジン100を制御する。運転者による制動操作を検出した場合、自動走行制御ECU7が0以下のフィードバック目標駆動力FofをエンジンECU8に出力し、エンジンECU8が勾配目標駆動力Foi未満の目標駆動力Foに基づいてエンジン100を制御する。
(もっと読む)
車両のトランスミッションの切替過程中に牽引力に影響を与えるための方法及び装置
少なくとも2つの駆動車軸を有する車両のトランスミッションの切替過程中に牽引力に影響を与えるための装置及び方法に関する。第1の車軸の駆動システムが、トランスミッションの切替過程時に第2の車軸で生じる牽引力の中断を少なくとも部分的に補償するように制御される。  (もっと読む)
(もっと読む)
走行制御装置
【課題】フィードバック制御によって車両の走行制御を行う場合により高精度な走行制御を行うことができる走行制御装置を提供することを課題とする。
【解決手段】走行計画に従って走行するようにフィードバック制御によって車両を走行制御する走行制御装置1であって、走行計画における目標軌跡の位置毎に重視する制御項目を決定する制御項目決定手段41と、この決定された重視する制御項目の制御ゲインを他の制御項目より高くする制御ゲイン決定手段41と、この決定された制御ゲインを走行計画に組み込む走行計画補正手段41とを備えることを特徴とする。
(もっと読む)
車両の駆動力制御装置
【課題】AYC(左右輪駆動力配分手段)及びTCL(駆動力制御手段)を備えた車両において、直進走行時におけるAYC及びTCLの制御を適正化し、走行安定性を向上させることのできる車両の駆動力制御装置を提供すること。
【解決手段】AYC用ECU(28)の駆動力移動量演算部(42)と、TCL用ECU(30)のエンジン制御部(60)とを接続し、当該TCL用ECUによりエンジントルク抑制制御を行う際には、AYC用ECUは駆動力移動量演算パラメータを極低μ路面モードに切り替え、駆動力移動量を抑制する。
(もっと読む)
自動車の開発中の駆動部プランの走行特性をシミュレーションする方法及び装置
本発明は、自動車の開発中の駆動部プランの走行特性をシミュレーションする方法とその方法に対応する装置に関する。本発明の課題は、構想中の駆動部の縦方向動特性とエネルギー消費量を実際の走行動作においてシミュレーションして、互いに比較、検証する、自動車の開発中の駆動部プランの走行特性をシミュレーションする方法及びその方法に対応する装置を提示することである。本発明では、自動車の開発中の駆動部プランの走行特性をシミュレーションするために、量産車の実際の走行動作において、量産車の縦方向動特性が構想中のハイブリッド式駆動部の縦方向動特性と一致するように、追加制御機器を用いて、エンジン制御部と変速機制御部を制御している。この場合、シミュレーションのために配備された従来の試験車両の縦方向動特性を制御するための追加制御機器が、試験車両のアクセルペダルの信号路に介入して、アクセルペダルの位置を検出するとともに、信号発生器によって、車両の加速度を制御するための「仮想的なアクセルペダル」の位置を調節することができる。試験車両のパワートレインのCANデータバスへの制御機器の介入によって、シミュレーションにとって重要な入力変量である、実際の速度、実際に投入されているギヤ段及びブレーキペダルの位置が得られる。  (もっと読む)
(もっと読む)
車両走行制御装置
【課題】スリップの発生を確実に抑制して車両を自動走行させることができる車両走行制御装置の提供。
【解決手段】車輪の接地荷重及び路面の摩擦係数に基づき、車輪に付与した際に車輪にスリップが生じない許容トルクを求めるトルク演算手段31と、演算された許容トルクを車輪に付与した場合に、車両に作用させ得る制限加速度を求める制限加速度演算手段32と、制限加速度及び指示加速度に基づき、現実に前記車両に作用させる加速度としての要求加速度を求めると共に、指示加速度に換えて要求加速度を自動走行制御手段50に出力する要求加速度決定手段33とを備えている。
(もっと読む)
車両用加速度制御装置
【課題】オーバシュートやアンダーシュートおよびハンチングを防ぎつつ、かつ、目標加速度に対する実加速度の追従性をより高める。
【解決手段】目標加速度の微分値の微分値であるDDTGに基づいてPID制御の比例ゲイン、積分ゲインおよび微分ゲインを設定することで、目標加速度に対する実加速度の追従性をより高めた制御を行うことが可能となる。このように、真に追従性を高めたい場合にのみゲインを大きくすることで、オーバシュートやアンダーシュートおよびハンチングを防ぎつつ、かつ、目標加速度に対する実加速度の追従性をより高めることが可能となる。
(もっと読む)
制動力制御装置,駆動力制御装置及び制駆動力制御装置
【課題】良好な減速性能を発揮しながら車輌の挙動の安定化を図ること。
【解決手段】少なくとも後輪10RL,10RRに対して個別の大きさの制動力を働かせることの可能な制動力発生装置(油圧制動手段21FL,21FR,21RL,21RRやブレーキアクチュエータ23等)を制御する油圧制動力制御装置30において、またぎ路面制動動作時に高μ路側と低μ路側の各車輪の制動力の差によって発生する車輌のヨーモーメントを抑制可能な高μ路側の後輪10RL(10RR)の横力を求める横力演算手段と、高μ路の路面摩擦係数と高μ路側の後輪10RL(10RR)における接地荷重に基づいてまたぎ路面制動動作時における後輪10RL(10RR)の最大摩擦力を求める最大摩擦力演算手段と、その横力と最大摩擦力に基づいてまたぎ路面制動動作時に高μ路側の後輪10RL(10RR)に対して働かせる制動力を求める目標制動力演算手段と、を備えること。
(もっと読む)
車両の制振制御装置
【課題】 車輪トルク制御による車両のピッチ・バウンス振動制振制御装置に於いて、車両の構成要素の状態の変化に起因する制振制御の悪化の影響を抑制すること。
【解決手段】 本発明の車両の制振制御装置は、ピッチ・バウンス振動振幅を抑制するよう車輪トルク補償量を算定する手段と、車輪トルク補償量の算定に用いられる車両の構成要素の特性又は該特性の変化を検出する特性変化検出手段と、車輪トルク補償量に基づいて車輪トルクを制御する手段とを含み、特性変化検出手段により検出された車両の構成要素の特性又は該特性の変化に基づいて車輪トルク補償量が変更されることを特徴とする。
(もっと読む)
141 - 160 / 352
[ Back to top ]